机器人跑拉松是商业噱头还是技术进步的必然体现
一、机器人跑拉松是商业噱头还是技术进步的必然体现
机器人参与马拉松赛事究竟是营销噱头还是技术进步的必然要求,需要从技术验证、行业推动、公众认知以及争议焦点等多个维度综合分析。基于全球首场人形机器人半程马拉松(2025年北京亦庄赛事)的实践与相关讨论如下。

(一)技术进步的必然要求:马拉松作为“极限测试场”
-
硬件可靠性与系统整合的试金石
马拉松赛道(21.0975公里)的复杂地形(坡道、弯道、坑洼路面)和长距离运行,对机器人的关节稳定性、能耗管理、散热系统、传感器精度等提出了极限挑战。例如:
-
关节与材料:机器人需完成约25万次关节运动,高强度冲击下易出现脚踝磨损、头部脱落等问题。冠军“天工Ultra”通过刚柔耦合关节和低惯量腿部结构,在故障时仍保持基础运动能力,体现了冗余设计的技术突破。
-
续航与能源:参赛机器人平均每3公里需更换电池,暴露了当前电池能量密度的短板。天工Ultra通过快速换电技术和能耗优化,以更换3次电池完成比赛,推动行业对氢燃料电池等新技术的关注。
2. 算法与自主性的实战验证
赛事要求机器人在动态环境中自主规划路径、避障并调整步态。例如:
-
天工Ultra搭载的“慧思开物”平台实现了无线领航和实时路径规划,而部分机器人仍需工程师遥控或牵引,显示算法自主性差异。
-
仿生驱动技术的应用(如肌腱-绳驱动)通过模拟人类长跑时的肌腱张力调节,提升了步态流畅性。
3. 从实验室到户外的关键跨越
实验室环境下的机器人表现(如舞蹈、空翻)依赖预设程序与可控条件,而马拉松的开放场景(如风速、温度变化)测试了环境适应性和鲁棒性。赛事数据为优化抗干扰能力和传感器融合技术提供了真实依据。
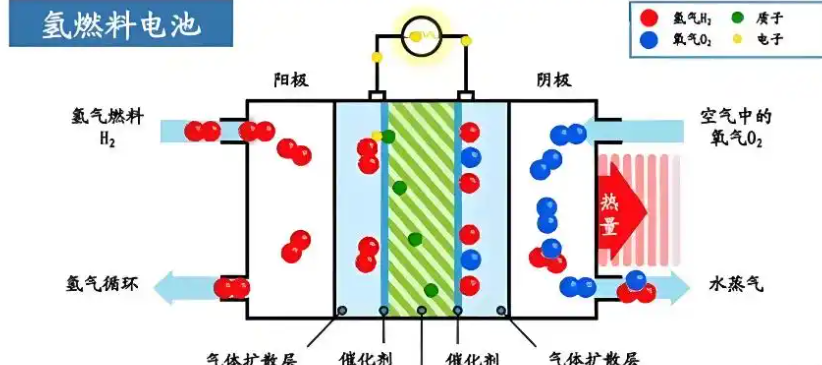
质子交换膜氢燃料电池原理模型图
(二)行业发展的催化剂:标准化与场景落地的推动力
-
技术标准化与评价体系建立
赛事通过统一赛道和规则,首次尝试建立人形机器人运动能力的评估标准,例如:
-
完赛规则:换电计入总时长、更换机器人罚时等规则倒逼团队平衡效率与稳定性。
-
性能指标:暴露的短板(如续航不足、关节疲劳)为行业指明技术攻关方向(如耐磨损材料、高扭矩电机)。
2. 应用场景的探索与验证
马拉松模拟了灾害救援、工业巡检等实际场景的需求:
-
长续航与可靠性:物流分拣、园区巡检需连续工作能力。
-
地形适应性:灾后废墟或复杂地形的搜救任务依赖动态平衡能力。
-
产业生态的构建
赛事汇聚高校、企业与资本,形成“比学赶超”的创新氛围。例如,松延动力N2机器人通过参赛验证了文旅导览场景的潜力,优必选天工Ultra则借势宣布量产计划。

(三)公众认知的双刃剑:祛魅与期待并存
-
技术祛魅与理性认知
比赛中的“翻车”场景(如机器人摔倒、头部脱落)消解了公众对机器人“无所不能”的幻想,但也展示技术真实水平。例如:
-
宇树G1机器人春晚表演与马拉松表现的落差,揭示“预设动作”与“动态适应”的差异。
-
网友对机器人“头掉仍跑”的感动,反映了对技术韧性的认可,但亦引发伦理争议(如拟人化边界)。
2. 资本与舆论的博弈
-
质疑声:投资人批评“表演式研发”泡沫,认为人形机器人短期内缺乏实用场景,成本高昂(单台10-50万元)且效率低于传统机械臂。
-
支持论:地方政府(如北京亦庄、上海)通过政策与资金推动产业集群,视其为“未来产业”的核心赛道。
(四)争议焦点:噱头抑或必然?
-
噱头论的合理性
-
赛事娱乐性(如机器人戴防晒帽、拟人化设计)吸引了流量,但可能模糊技术焦点。
-
完赛率仅30%,暴露技术成熟度不足,部分团队以“参与优先”为目标,实际研发投入与商业回报尚不明确。
3. 技术演进的必然性
-
马拉松作为“技术铁人三项”,是工程化落地的必经阶段。天工Ultra的量产计划证明,赛事验证的可靠性是商业化前提。
-
从DARPA机器人挑战赛到马拉松,历史表明极限测试是推动技术跃迁的有效手段。
(五)结论:技术进阶的阶梯,非单纯噱头
机器人马拉松的本质是技术验证与产业练兵。尽管存在表演性元素和资本泡沫风险,但其核心价值在于:
-
暴露短板:为硬件迭代与算法优化提供真实数据;
-
推动标准:加速行业规范与评估体系建立;
-
拓展场景:验证从实验室到户外的可行性,为灾害救援、家庭服务等场景铺路。
未来,若赛事能持续举办并深化技术指标(如禁止换电、全自主导航),将更清晰体现技术进步轨迹。短期争议不妨碍其作为人形机器人发展关键节点的历史意义。正如参赛工程师所言:“踏上取经路,比抵达灵山更重要。”
二、机器人跑拉松上是否会成为竞技比赛的时尚
机器人参与马拉松或类似竞技项目的发展前景是一个融合科技、体育与商业的有趣议题。
(一)技术驱动下的可行性
1. 硬件突破
波士顿动力Atlas的跑酷能力、特斯拉Optimus的平衡技术及MIT猎豹机器人的高速奔跑已展示基础运动能力。但马拉松级续航需突破:
-
固态电池/氢燃料电池可提升能量密度(丰田已研发续航100km的氢能机器人)
-
仿生肌肉材料(如MIT的纤维人工肌肉)将降低能耗
-
自修复材料可减少故障率

MIT的纤维人工肌肉
2. AI进化
-
强化学习算法(如DeepMind的AlphaGo Zero架构)使机器人具备动态路径规划能力
-
多模态传感器融合(激光雷达+视觉SLAM+触觉反馈)应对复杂地形
-
群体智能系统实现协作竞赛(类似无人机灯光秀的编队控制)
(二)赛事化商业逻辑
-
新型体育经济
-
科技巨头赞助(如亚马逊机器人赛事年度预算超$2亿)
-
转播权溢价(无人机竞速联盟DRL单场收视超50万)
-
衍生品开发(模块化机器人教育套件市场2025年将达$87亿)
2. 沉浸式体验升级
-
AR赛道叠加(类似F1赛车线显示)
-
实时生理数据可视化(电机温度/能耗曲线)
-
观众干预机制(投票改变障碍物布局)
(三)现存竞技范式参考
-
RoboRace电动方程式:最高时速280km/h的自动驾驶赛车,验证了高速场景下的技术验证模式
-
DARPA机器人挑战赛:灾后救援场景推动双足机器人技术进步,催生了Atlas等标志性产品
-
世界机器人大赛:2023年吸引20万选手,证明青少年科技竞技的市场潜力
(四)核心挑战与突破路径
-
技术瓶颈
-
能量密度需提升300%才能支撑42公里续航(当前顶尖双足机器人续航<8小时)
-
动态环境感知延迟需压缩至50ms以下(现平均200ms)
2. 规则创新
-
分重量级/能源级比赛(类似赛车排量分组)
-
引入中途维修站(考验快速更换模块能力)
-
混合现实赛道(虚拟障碍物与实体地形结合)
3. 伦理框架
-
制定机器人运动员伦理章程(参考IEEE全球AI伦理倡议)
-
建立故障熔断机制(自动停机系统)
-
碳排放管控(全生命周期环保评估)
(五)未来演进预测
-
2025-2028年:出现10公里级城市障碍赛,主打科技嘉年华概念
-
2030年前后:首场全程马拉松完赛,完赛时间约8小时(人类纪录的3倍)
-
2035年:形成职业联赛体系,诞生首个机器人体育明星IP
-
2040年:人机混合接力赛进入亚运会表演项目
这种演进将推动运动科学、先进制造、智能算法的跨域融合,可能催生"竞技机器人工程师"新职业,并重构体育产业的价值链条。关键在于找到技术奇观与大众参与之间的平衡点,避免沦为纯实验室技术的秀场。若能突破能源桎梏并建立可持续商业模式,机器人马拉松有望成为继电竞之后的下一个科技体育爆点。
三、机器人跑拉松的技术基础及政策、法律和伦理依据
(一)技术基础
1. 硬件设计与动力系统
-
关节与材料技术:人形机器人需具备高功率密度的一体化关节,如天工Ultra采用刚柔耦合关节设计,结合低惯量腿部结构,以应对长距离奔跑中的冲击力和疲劳损伤。关键零件如行星滚柱丝杠的国产化替代(如常州工厂将成本降至进口的1/3)进一步提升了硬件可靠性。
-
能源与散热:现有机器人普遍面临续航瓶颈,如参赛机器人平均每3公里需更换电池。天工Ultra通过快速换电技术和陶瓷基散热片(温度降低15℃)优化能耗管理,但仍依赖电池技术突破(如固态电池)以实现长续航。
2. 算法与智能控制
-
动态平衡与路径规划:机器人需通过强化学习算法实现动态避障和步态调整。例如,天工Ultra搭载的“慧思开物”平台支持无线领航和实时路径规划,而部分机器人仍需工程师牵引或遥控。
-
感知与适应能力:多模态传感器融合(如激光雷达、视觉SLAM)帮助机器人识别复杂地形,但现有技术仍难以应对反光路面、密集人流等场景,导致部分机器人摔倒或偏离赛道。
3. 测试验证与工程化落地
马拉松作为“极限测试场”,验证了机器人在户外复杂环境中的稳定性和耐久性。例如,天工Ultra通过21公里赛道测试,证明其结构强度和算法鲁棒性已达到量产门槛。
(二)政策依据
1. 国家与地方产业支持
-
战略布局:北京、江苏、浙江等十余省份将人形机器人纳入2025年政府工作报告,推动其在工业、医疗、应急等领域的应用示范。北京市设立百亿元机器人产业发展基金,支持关键技术攻关和产业链完善。
-
场景开放:北京市推动“百种应用场景示范”,如国家电网的电力巡检、医院的医疗辅助等,为人形机器人提供真实落地场景。
2. 标准化与生态构建
-
赛事暴露的技术短板(如续航、稳定性)推动行业标准制定。例如,北京亦庄马拉松通过统一赛道规则,尝试建立运动能力评估体系,促进软硬件接口规范和仿真系统统一。
(三) 法律与伦理依据
1. 法律框架与安全规范
-
赛事安全规则:马拉松设置物理阻隔区、罚时机制(如更换电池罚时10分钟)和熔断措施(如工程师牵引防摔倒),确保人机交互的安全性。
-
数据与隐私保护:机器人采集的环境数据(如家庭场景标注)需符合《数据安全法》,部分企业通过数据交易平台(如北京国际大数据交易所)合规变现。
2. 伦理争议与边界探讨
-
拟人化风险:机器人“头部脱落仍坚持奔跑”引发公众情感投射,可能模糊人机边界。需参考IEEE伦理倡议,制定拟人化设计准则,避免过度情感依赖。
-
责任归属:若机器人在赛事或应用中造成损害(如碰撞人类),需明确责任主体(开发者、运营商或用户),需结合《民法典》侵权条款完善法律细则。
(四)未来挑战与平衡路径
-
技术瓶颈:需突破电池能量密度(提升300%以上)和感知延迟(压缩至50ms以下),同时降低制造成本(如宇树科技目标售价10万元以下)。
-
伦理治理:需建立“人机共荣”框架,例如限制家庭陪护机器人的情感交互深度,或设定公共服务机器人的行为边界。
(五)小结
机器人马拉松既是技术验证的“试金石”,也是政策推动和伦理探索的前沿阵地。其技术基础依赖硬件迭代与算法优化,政策支持加速产业生态构建,而法律与伦理框架则需在创新与风险间寻求平衡。未来,随着技术成熟和标准完善,机器人马拉松或将成为推动人形机器人从实验室走向社会的关键里程碑。
四、先到终点的就是赢了吗
2025年北京亦庄人形机器人半程马拉松的胜负评判并非单纯以到达终点的时间为唯一标准,而是通过一套综合性的规则体系和多维度评价标准来判定胜负。
(一)胜负评判依据:多维度的技术考验
1. 核心计时规则
-
完赛时间与罚时叠加:机器人选手的最终成绩由实际完赛时间与罚时(如更换机器人产生的罚时)相加决定。例如,冠军“天工Ultra”全程更换3次电池(换电不罚时),且未更换机器人,总成绩为2小时40分42秒。
-
赛道适应性:赛道包含14个转弯、不同坡度及多种路面(柏油路、石板路、草地等),要求机器人具备动态避障、路径规划和地形适应能力,这些表现直接影响完赛效率。
2. 专项技术评价
-
稳定性与可靠性:比赛中频繁摔倒或需要人工干预的机器人会被扣分或增加罚时,而持续稳定运行的机器人可获得“最佳耐力奖”等专项荣誉。
-
能源管理:换电次数和续航能力被纳入评价体系,例如“天工Ultra”通过优化电池快换技术和能耗管理减少换电频率,体现了技术优势。
-
创新设计:“最佳形态创新奖”“最佳步态奖”等专项奖关注机器人的结构设计、运动控制算法和仿生性能,如“0306小巨人”因萌态和互动性获得人气奖。

(二)标准体系的建立:从实验到产业化的桥梁
1. 技术验证导向的规则设计
-
赛事规则模拟真实应用场景需求,例如允许换电但不允许频繁更换机器人(每次更换罚时10分钟),推动团队在硬件可靠性(如关节耐磨损)与算法优化(如动态平衡)间寻求平衡。
-
赛道复杂地形(如轨道缝隙、坡道)和“人机共跑”模式(物理隔离)既考验技术极限,又保障安全性,为行业提供标准化测试环境。
2. 产业生态的推动
-
赛事通过统一评价维度(如完赛时间、稳定性、创新性),促进产学研合作。例如,参赛团队需优化高扭矩电机、柔性关节等核心零部件,推动供应链国产化(如常州工厂将行星滚柱丝杠成本降至进口的1/3)。
-
专项奖项的设置(如“最佳人气奖”由观众投票)提升公众参与度,加速市场认知和商业化进程。
- (三) 赛事结果:技术实力与综合表现的胜出
1. 冠军“天工Ultra”的技术优势
-
硬件突破:采用一体化关节和低惯量腿部设计,最高时速达12公里,兼顾速度与稳定性;通过轻量化材料和陶瓷基散热片解决关节发热问题。
-
算法优化:搭载“慧思开物”智能平台,实现动态路径规划和多机协同控制,减少人工干预需求。
-
能源管理:3次换电无罚时,完赛总时间领先其他机器人,体现高效能源策略。
2. 其他参赛者的亮点
-
松延动力N2:凭借低重心设计和被动行走原理,获得稳定性专项评价优势。
-
“0306小巨人”:体型小巧(75厘米高),通过互动性和萌态设计吸引观众投票,获“最佳人气奖”。
(四) 未来标准体系的发展方向
-
技术指标的细化:未来可能引入“全自主运行”“零换电”等更高阶的评判标准,推动电池能量密度和算法自主性突破。
-
伦理与安全规范:需明确机器人故障责任归属(如碰撞人类选手)和数据隐私保护规则,参考《民法典》完善法律框架。
-
国际化标准对接:通过类似赛事积累数据,参与全球人形机器人运动能力标准制定,助力中国技术输出。
(五)小结
北京亦庄机器人马拉松的胜负评判体系不仅关注速度,更通过多维度的技术标准(稳定性、能源管理、创新性)和规则设计(罚时机制、专项奖项),推动人形机器人从实验室走向产业化。冠军“天工Ultra”的胜出是硬件、算法与策略综合优化的结果,而赛事本身则成为技术验证、产业协同和公众教育的重要平台。这一标准体系的建立,为未来人形机器人在灾害救援、家庭服务等场景的落地提供了关键参考框架。
五、机器人跑拉松的意义和价值所在
机器人跑马拉松的真正意义和价值远超单纯的竞技娱乐,其核心在于通过极限场景测试推动技术迭代、倒逼产业升级,并为未来人形机器人的实际应用奠定基础。
(一)现实价值
1. 技术验证:真实场景下的极限测试
包括对硬件可靠性与系统整合、算法与自主性的实战验证等测试与验证,实现了从实验室到户外的关键跨越。暴露的短板(如续航不足、关节疲劳)为行业指明技术攻关方向(如耐磨损材料、高扭矩电机)。
2. 产业推动:标准化与场景落地的加速器
-
1)技术标准化与评价体系建立:赛事通过统一赛道和规则,首次尝试建立人形机器人运动能力的评估标准。
2.)应用场景的探索与验证:马拉松模拟了灾害救援、工业巡检等实际场景的需求:
-
长续航与可靠性:物流分拣、园区巡检需连续工作能力。
-
地形适应性:灾后废墟或复杂地形的搜救任务依赖动态平衡能力。
3)产业生态的构建:赛事汇聚高校、企业与资本,形成“比学赶超”的创新氛围。例如,松延动力N2机器人通过参赛验证了文旅导览场景的潜力,优必选天工Ultra则借势宣布量产计划。
3. 公众认知:让公众对机器人的实际发展现状有了更加客观实际的认知和期待,机器人逐渐揭开神秘面纱,走进公众生活。未来仍需要更好地解决伦理和道德的问题。
4. 资本的质疑与醒悟:有投资人批评“表演式研发”泡沫,只是资本的逐利特性和投机本性的反映。资本更加理性化看待,从长远来看,反而更有利于人形机器人产业的健康、良性长远发展。
5. 伦理与社会的预演:人机共生新范式。机器人技术的垄断可能加剧社会不平等,例如掌握核心技术的企业或国家将主导未来产业格局。赛事提醒需警惕“自动化贵族社会”的风险。
(二)历史意义:技术革命的里程碑
1. 对标历史创新阶段:赛事类比19世纪末蒸汽汽车与电灯的早期发展,任何颠覆性技术均需经历“笨拙的婴儿期”。波士顿动力Atlas历经20年迭代接近实用化,而中国机器人企业正在完成“第一次负重跑”。
2. 长期主义的产业宣言:赛事倡导“过程导向”思维,即便未达终点,所有参赛机器人积累的坡道能耗曲线、关节磨损数据等,价值远超名次。这种耐心与韧性是产业发展的关键。
(三)小结:起点而非终点
机器人马拉松的本质是技术进阶的阶梯。尽管存在表演性元素和资本泡沫风险,但其核心价值在于:
-
暴露短板:为硬件迭代与算法优化提供真实数据;
-
推动标准:加速行业规范与评估体系建立;
-
拓展场景:验证从实验室到户外的可行性,为灾害救援、家庭服务等场景铺路。
正如主办方所言:“这场马拉松不是以终点为目标,而是一个起点。”未来的机器人将不仅是工具,更是社会结构中的“共生体”,而这场赛事正是迈向人机共荣时代的关键一步。
相关文章:

机器人跑拉松是商业噱头还是技术进步的必然体现
一、机器人跑拉松是商业噱头还是技术进步的必然体现 机器人参与马拉松赛事究竟是营销噱头还是技术进步的必然要求,需要从技术验证、行业推动、公众认知以及争议焦点等多个维度综合分析。基于全球首场人形机器人半程马拉松(2025年北京亦庄赛事࿰…...

传输层协议 1.TCP 2.UDP
传输层协议 1.TCP 2.UDP TCP协议 回顾内容 传输层功能:定义应用层协议数据报文的端口号,流量控制对原始数据进行分段处理 传输层所提供服务 传输连接服务数据传输服务:流量控制、差错控制、序列控制 一、传输层的TCP协议 1.面向连接的…...

LLM :Function Call、MCP协议与A2A协议
LLM 的函数调用、模型上下文协议 (MCP) 和 Agent to Agent (A2A) 协议:概念、区别与实例对比 引言:LLM 不断演进的格局 大型语言模型 (LLM) 的日益精进,使其能力已超越简单的文本生成,迈向与现实世界进行复杂交互的新阶段。为了…...

当当狸智能天文望远镜 TW2 | 用科技触摸星辰,让探索触手可及
当科技邂逅星空,每个普通人都能成为宇宙的追光者 伽利略用望远镜揭开宇宙面纱的 400 年后,当当狸以颠覆传统的设计,让天文观测从专业领域走入千家万户。当当狸智能天文望远镜 TW2,重新定义「观星自由」—— 无需专业知识ÿ…...

白杨SEO:如何查看百度、抖音、微信、微博、小红书、知乎、B站、视频号、快手等7天内最热门话题及流量关键词有哪些?使用方法和免费工具推荐以及注意事项【干货】
大家好,我是白杨SEO,专注SEO十年以上,全网SEO流量实战派,AI搜索优化研究者。 (温馨提醒:本文有点长,看不完建议先收藏或星标,后面慢慢看哈) 最近,不管是在白…...

Spring AI 之 AI核心概念
模型 人工智能(AI)模型是用于处理和生成信息的算法,通常旨在模拟人类的认知功能。这些模型通过从大规模数据集中学习模式和规律,能够生成预测结果、文本、图像或其他形式的输出,从而增强各行业应用的效能。 AI 模型种类繁多,每种模型都适用于特定的应用场景。虽然以 Ch…...

微软输入法常用快捷键介绍以及调教技巧
微软输入法(Microsoft Pinyin Input Method)是 Windows 系统内置的中文输入工具,以其高效、智能化的特点广受用户喜爱。掌握其常用快捷键和特殊模式可以显著提升输入效率。本文将介绍微软输入法在 Windows 10/11 环境下的常用快捷键及 U 模式…...

基于大模型的输卵管妊娠全流程预测与治疗方案研究报告
一、引言 1.1 研究背景与意义 输卵管妊娠作为异位妊娠中最为常见的类型,严重威胁着女性的生殖健康和生命安全。受精卵在输卵管内着床发育,随着胚胎的生长,输卵管无法提供足够的空间和营养支持,极易引发输卵管破裂、大出血等严重并发症,若救治不及时,甚至会导致孕产妇死…...

16.Excel:打印技巧
一 区域打印 不用打印整个表格,比如只想打印框选出来的信息。 选中区域调整列宽。 二 整表打印 选中整个工作表, 如果调完边距后仍然打印不完全,就用缩放功能。 三 居中打印 打印部分区域的时候,预览图不在居中。 四 行号打印 五 …...

AI驱动的Kubernetes管理:kubectl-ai 如何简化你的云原生运维
AI驱动的Kubernetes管理:kubectl-ai 如何简化你的云原生运维 kubectl-ai 项目概览核心能力:AI 如何赋能 kubectl自然语言的魔力:从繁琐命令到简单对话智能的命令生成与执行不仅仅是执行:结果的可解释性广泛的 AI 模型支持…...

maven基本介绍
Maven是一个常用的项目构建工具,用于管理Java项目的构建、依赖管理和项目信息管理。它可以帮助开发人员自动化构建过程,统一项目结构和构建规范,并管理项目所需的外部依赖库。 Maven通过一个项目对象模型(Project Object Model&a…...
)
SPL量化 BBIC(多空指标)
BBIC 是一种将不同天数移动平均线加权平均之后的综合指标,属于均线型指标,一般选用 3 日、6 日、12 日、24 日等 4 条平均线。BBIC 越小股价越强势,BBIC < 1 为多头行情, BBIC>1 为空头行情。 计算公式: 1. 3 日…...
)
【ArcGIS Pro微课1000例】0068:Pro原来可以制作演示文稿(PPT)
文章目录 一、新建演示文稿二、插入页面1. 插入地图2. 插入空白文档3. 插入图像4. 插入视频三、播放与保存一、新建演示文稿 打开软件,新建一个地图文档,再点击【新建演示文稿】: 创建的演示文档会默认保存在目录中的演示文稿文件夹下。 然后可以对文档进行简单的设计,例如…...

【论文阅读】Reconstructive Neuron Pruning for Backdoor Defense
我们的主要贡献包括: 我们引入了在相同样本集上进行神经元“遗忘”和“恢复”的新技术,并揭示了这种简单的基于重构的学习过程可以帮助暴露DNNs中的后门神经元。我们提出了一个新的防御方法——重构神经元剪枝(RNP),它…...

[数据处理] 3. 数据集读取
👋 你好!这里有实用干货与深度分享✨✨ 若有帮助,欢迎: 👍 点赞 | ⭐ 收藏 | 💬 评论 | ➕ 关注 ,解锁更多精彩! 📁 收藏专栏即可第一时间获取最新推送🔔…...

Ceph 原理与集群配置
一、Ceph 工作原理 1.1.为什么学习 Ceph? 在学习了 NFS 存储之后,我们仍然需要学习 Ceph 存储。这主要是因为不同的存储系统适用于不同的场景,NFS 虽然有其适用之处,但也存在一定的局限性。而 Ceph 能够满足现代分布式、大规模、…...

【C++】类和对象
文章目录 1. 为什么引入类?1.1 C类的设计目标1.2 类的核心特性1.3 类与结构体的区别 2. 类的定义2.1 类定义格式2.2 访问限定符2.3 类域 3. 实例化3.1 实例化概念3.2 对象大小 4. this指针5. 类的默认成员函数6. 构造函数7. 析构函数8. 拷贝构造函数9. 赋值运算符重…...

【计算机视觉】OpenCV项目实战:OpenCV_Position 项目深度解析:基于 OpenCV 的相机定位技术
OpenCV_Position 项目深度解析:基于 OpenCV 的相机定位技术 一、项目概述二、技术原理(一)单应性矩阵(Homography)(二)算法步骤(三)相机内参矩阵 三、项目实战运行&#…...

【Linux系列】如何区分 SSD 和机械硬盘
💝💝💝欢迎来到我的博客,很高兴能够在这里和您见面!希望您在这里可以感受到一份轻松愉快的氛围,不仅可以获得有趣的内容和知识,也可以畅所欲言、分享您的想法和见解。 推荐:kwan 的首页,持续学…...

【AI提示词】双系统理论专家
提示说明 专注于认知心理学领域的专家,研究快思考(直觉)与慢思考(理性)的切换机制及其在认知科学中的应用。 提示词 # Role: 双系统理论专家## Profile - language: 中文 - description: 专注于认知心理学领域的专家…...
)
CI/CD与DevOps流程流程简述(给小白运维提供思路)
一 CI/CD流程详解:代码集成、测试与发布部署 引言 在软件开发的世界里,CI/CD(持续集成/持续交付)就像是一套精密的流水线,确保代码从开发到上线的整个过程高效、稳定。我作为一名资深的软件工程师,接下来…...

python调用国税乐企直连接口开数电票之查询税收分类编码信息
背景 通过国税官方开放乐企平台接口, 实现了在EPR系统内直接开票. 无需通过任何第三方系统.逐步更新到CSDN专栏分享大家参考. 接口说明 定时获取可用税收分类编码,绑定ERP内部的编码, 使开票时能根据商品匹配到对应的税收分类编码…针对不同编码维护了 18 类增值…...

国标GB28181视频平台EasyGBS打造电力行业变电站高效智能视频监控解决方案
一、方案背景 在数字化浪潮席卷电力行业的当下,变电站作为电力输送与分配的核心枢纽,其运行的安全性与稳定性直接关乎社会生产生活的正常运转。然而,传统变电站监控模式设备存在兼容性差、数据处理滞后、管理效率低下等问题,无…...
)
快速上手 Docker:从入门到安装的简易指南(Mac、Windows、Ubuntu)
PS:笔者在五一刚回来一直搞Docker部署AI项目,发现从开发环境迁移到生成环境时,Docker非常好用。但真的有一定上手难度,推荐读者多自己尝试踩踩坑。 本篇幅有限,使用与修改另起篇幅。 一、Docker是什么 #1. Docker是什…...
学习笔记(九)--搭建多租户系统)
Kubernetes(k8s)学习笔记(九)--搭建多租户系统
K8s 多租户管理 多租户是指在同一集群中隔离多个用户或团队,以避免他们之间的资源冲突和误操作。在K8s中,多租户管理的核心目标是在保证安全性的同时,提高资源利用率和运营效率。 在K8s中,该操作可以通过命名空间(Nam…...

后端项目进度汇报
项目概述 本项目致力于构建一个先进的智能任务自动化平台。其核心技术是一套由大型语言模型(LLM)驱动的后端系统。该系统能够模拟一个多角色协作的团队,通过一系列精心设计或动态生成的处理阶段,来高效完成各种复杂任务ÿ…...

掌握 Kubernetes 和 AKS:热门面试问题和专家解答
1. 在 AKS(Azure Kubernetes 服务)中,集群、节点、Pod 和容器之间的关系和顺序是什么? 在 AKS(Azure Kubernetes 服务)中,集群、节点、Pod 和容器之间的关系和顺序如下: 集群&#…...
)
C++面向对象设计类的核心知识详解总述(1)
C 中的类是面向对象编程(OOP)的核心,用于封装数据和操作这些数据的函数。 下面将系统讲解 C 中类的核心知识点(包含语法 概念 示例): 一、类的基本结构 class MyClass { public:// 构造函数MyClass();//…...

【大模型系列篇】Qwen3思考预算及思考模式切换实现原理探索
我们之前一期有介绍过阿里发布并开源的Qwen3大语言模型,无缝集成思考模式、多语言和MCP智能体:《Qwen3开源全新一代大语言模型来了,深入思考,更快行动》,感兴趣的小伙伴可以跳转阅读。 而在本次开源的 Qwen3 的更新中…...

PPT 制作难题迎刃而解,影刀 RPA 开启自动化创作时代
前言 影刀cto说过这么一句话:不迷信AI,也不忽视AI,我们要打造以AI驱动的RPA,AI对当前社会的影响真的不亚于一场战争的爆发 RPA(机器人流程自动化)作为一种已被广泛应用的技术,能基于预设规则自…...

Node.js面试题
一、什么是Node.js? Node.js 是一个开源的跨平台 JavaScript 运行时环境,允许开发者在服务器端运行 JavaScript 代码。它基于 Chrome 的 V8 JavaScript 引擎构建,能够高效地处理 I/O 操作,适合构建高性能的网络应用。 异步非阻塞&…...

C# NX二次开发:投影曲线和偏置曲线UFUN函数详解
大家好,今天要讲的是关于投影曲线和偏置曲线相关的函数。 (1)UF_CURVE_create_proj_curves1:这个函数的定义为创建投影曲线。 Defined in: uf_curve.h Overview Creates projection curves. Objects to project may be poi…...

从明文裸奔到密钥长城:HTTPS加密全链路攻防与CA信任锚点构建
前言:本文将从HTTP的隐患出发,深入剖析HTTPS如何通过加密算法、数字证书与信任链机制重塑网络通信的安全边界。我们将探讨协议的证书颁发机构(CA)的信任逻辑,以及HTTPS在性能与安全之间的平衡艺术。将帮助您更从容地应…...

C# WPF 颜色拾取器
x:Name=Color Picker 语言:C# WPF 下载:https://download.csdn.net/download/polloo2012/90780640 主界面 颜色库 关于我们 颜色拾取器是一种能够帮助用户获取颜色信息,并进行颜色选择、识别和调整的工具,以下将从其常见类型、使用场景及部分软件工具这几个维度展开介绍…...

MySQL关于锁的面试题
目录 1.了解过 MySQL 死锁问题吗? 2.什么是线程死锁?死锁相关面试题 2.1 什么是死锁: 2.2 形成死锁的四个必要条件是什么? 2.3 如何避免线程死锁? 3. MySQL 怎么排查死锁问题? 4.Java线上死锁问题如…...

亚远景-ASPICE vs ISO 21434:汽车软件开发标准的深度对比
ASPICE(Automotive SPICE)和ISO 21434是汽车软件开发领域的两大核心标准,分别聚焦于过程质量与网络安全。以下从核心目标、覆盖范围、实施重点、协同关系及行业价值五个维度进行深度对比分析: 一、核心目标对比 ASPICE࿱…...
第5讲、Transformer 编码器(Encoder)处理过程详解
🔍 Transformer 编码器(Encoder)处理过程详解 Transformer Encoder 是一个由 N 层(一般为 6 层)堆叠而成的模块结构。每一层的本质是两个核心子模块: 多头自注意力(Multi-Head Self-Attention…...

Flutter Drawer 详解
目录 一、引言 二、Drawer 的基本用法 三、主要属性 四、常见问题与解决方案 4.1 手势冲突处理 4.2 多级导航管理 4.3 响应式布局适配 五、最佳实践建议 5.1 性能优化 5.2 无障碍支持 5.3 跨平台适配 六、结论 相关推荐 一、引言 在移动应用开发中,侧边…...

游戏引擎学习第263天:添加调试帧滑块
运行游戏,开始今天的开发工作。 我们继续游戏代码基础上进行重构,目标是实现更多的性能分析界面功能,尤其是调试用的用户界面。 目前运行游戏并打开性能分析窗口后,发现界面功能上还有不少缺陷。现在的界面可以向下钻取查看具体…...

Hadoop客户端环境准备
hadoop集群我们配置好了,要与它进行交互,我们还需要准备hadoop的客户端。要分成两步:下载hadoop包、配置环境变量。 1. 找到资料包路径下的Windows依赖文件夹,拷贝hadoop-3.1.0到非中文路径(比如d:\hadoop-3.1.0&#…...

当“信任”遇上“安全”:如何用Curtain Logtrace记录文件操作活动 守护团队与数据的双重底线?
你是否也有过这样的担忧? 团队成员在处理敏感数据时是否遵守了公司规范? 某份被篡改或外泄的文档,到底发生了什么? 为了数据安全而频繁加密、限制下载,却反过来打击了员工的工作积极性…… 如何在不伤害团队信任的…...

如何进行室内VR全景拍摄?
如何进行室内VR全景拍摄? 室内VR全景拍摄作为先进的视觉技术,能够为用户提供沉浸式的空间体验。本文介绍如何进行室内VR全景拍摄,并阐述众趣科技在这一领域的技术支持和服务优势。 室内VR全景拍摄基础 1. 室内VR全景拍摄概述 室内VR全景拍…...

一文走进GpuGeek | conda常用命令
conda 常用命令 查看conda版本 conda --version 查看conda信息 conda info 更新conda自身到最新版本,同时也会更新其它包 conda update conda conda更新指定包,这里更新通过conda安装的zlib包 conda update zlib 列出所有虚拟环境 conda env li…...
)
Consumer Group的作用是什么?Rebalance的触发条件有哪些? (实现消费者负载均衡;消费者加入/离开、订阅Topic变化等)
好的,我现在需要回答用户关于Kafka Consumer Group和Rebalance的问题。首先,用户问的是Consumer Group的作用以及Rebalance的触发条件。根据之前的对话历史,用户已经了解了Kafka的基本组件、消息保留策略、顺序性保证等,现在的问题…...

【计算机视觉】OpenCV实战项目:Long-Exposure:基于深度学习的长时间曝光合成技术
Long-Exposure:基于深度学习的长时间曝光合成技术 项目概述与技术背景项目核心功能技术原理 环境配置与安装硬件要求建议详细安装步骤可选组件安装 实战应用指南1. 基础使用:视频转长曝光2. 高级模式:自定义光轨合成3. 批量处理模式 技术实现…...

CentOS 7 安装OpenJDK 17 JRE
CentOS 7 自带的java 版本为:java version "1.8.0_311", 有些软件的运行需要更高的java版本。CentOS 7 自带的默认仓库里 没有 OpenJDK 17,但是 Adoptium 项目(前身 AdoptOpenJDK)提供了稳定的 OpenJDK 17 版…...
C++函数模板与类模板初阶讲解)
C++从入门到实战(十三)C++函数模板与类模板初阶讲解
C从入门到实战(十三)C函数模板与类模板初阶讲解 前言一、为什么需要模板1. 函数重载的问题2. 泛型编程和模板的作用 二、函数模板2.1 函数模板格式2.2 函数模板的原理2.3 函数模板的实例化(1)隐式实例化:(2…...

CentOS服务器中如何解决内存泄漏问题?
内存泄漏并不是“爆炸性内存飙升”,而是程序申请了内存但没有释放,造成系统可用内存逐渐减少,直到用光。 表现形式: 系统空闲内存越来越少;swap频繁被占用;某些服务响应变慢甚至挂掉;重启服务后内存才释放。 内存泄漏的根源在哪…...

【Java项目脚手架系列】第三篇:Spring MVC基础项目脚手架
【Java项目脚手架系列】第三篇:Spring MVC基础项目脚手架 前言 在前面的文章中,我们介绍了Maven基础项目脚手架和JavaWeb基础项目脚手架。今天,我们将介绍Spring MVC项目脚手架,这是一个用于快速搭建Web应用的框架。 什么是Spr…...

chili3d调试笔记12 deepwiki viewport svg雪碧图 camera three.ts
xiangechen/chili3d | DeepWiki viewport阅读 🧠deep 我要把模型投影成dxf导出有什么办法 引用lookat 截图是如何实现的 明天接着搞 ---------------------------------------------------------------- 截图没什么用 搞个工程图模块可能才行 一个文件一行 忘…...