《ATPL地面培训教材13:飞行原理》——第5章:升力
第5章:升力
目录
- 空气动力系数
- 基本升力方程
- 回顾
- 升力曲线
- 升力曲线的解释
- 速度-动压关系
- 密度高度
- 翼型剖面升力特性
- 阻力特性简介
- 升阻比
- 飞机重量对最小飞行速度的影响
- 表面状况
- 高升力条件下的飞行
- 三维气流
- 机翼术语
- 翼尖涡流
- 尾流湍流(参考:AIC P 072/2010)
- 地面效应
- 结论
- 总结
- 第XX1页答案
- 第XX2页答案
- 问题
- 答案
空气动力系数
升力和阻力这两种空气动力都受多个变量的综合影响。主要因素包括:
- 气流速度(V)
- 空气密度( ρ \rho ρ)
- 动压( 1 2 ρ V 2 \frac{1}{2} \rho V^{2} 21ρV2)
- 表面的形状或剖面
- 攻角
- 压力分布( C L C_L CL或 C D C_D CD)
- 表面积(S)
- 表面状况
- 可压缩性影响(将在后续章节中详细讨论)
动压
气流的动压 ( 1 2 ρ V 2 ) \left(\frac{1}{2} \rho V^{2}\right) (21ρV2)是空气动力的共同分母和主要因素,因为压力分布的大小取决于赋予气流的能量 ( KE = 1 2 m V 2 ) \left(\text{KE}=\frac{1}{2} m V^{2}\right) (KE=21mV2)。
压力分布
另一个关键因素是表面上的相对压力分布。速度分布及由此产生的压力分布由表面的形状或剖面以及攻角 ( C L 或 C D ) \left(C_L \text{ 或 } C_D\right) (CL 或 CD)决定。
表面积
由于空气动力是各种压力分布在表面上作用的结果,表面积(S)是剩余的主要因素——在给定压力差的情况下,表面积越大,产生的力就越大。
因此,任何空气动力都可以表示为三个主要因素的乘积:
- 气流的动压 ( 1 2 ρ V 2 ) \left(\frac{1}{2} \rho V^{2}\right) (21ρV2)
- 由相对压力分布决定的力系数 ( C L 或 C D ) \left(C_L \text{ 或 } C_D\right) (CL 或 CD)
- 物体的表面积(S)
这三个因素的关系可以用以下方程表示:
F = Q C F S F = Q C_F S F=QCFS
其中:
F = F = F= 空气动力(升力或阻力)
Q = Q = Q= 动压 ( 1 2 ρ V 2 ) \left(\frac{1}{2} \rho V^{2}\right) (21ρV2)
C F = C_F = CF= 空气动力系数 ( C L 或 C D ) \left(C_L \text{ 或 } C_D\right) (CL 或 CD)
S = S = S= 表面积
基本升力方程
升力被定义为垂直于( 9 0 ∘ 90^{\circ} 90∘)相对气流或飞机飞行路径产生的净力。升力来源于机翼上下表面之间的压力差。这种升力可以用以下方程定义:
L = 1 2 ρ V 2 C L S L = \frac{1}{2} \rho V^{2} C_L S L=21ρV2CLS
正确理解升力公式是全面掌握飞行原理的关键要素。
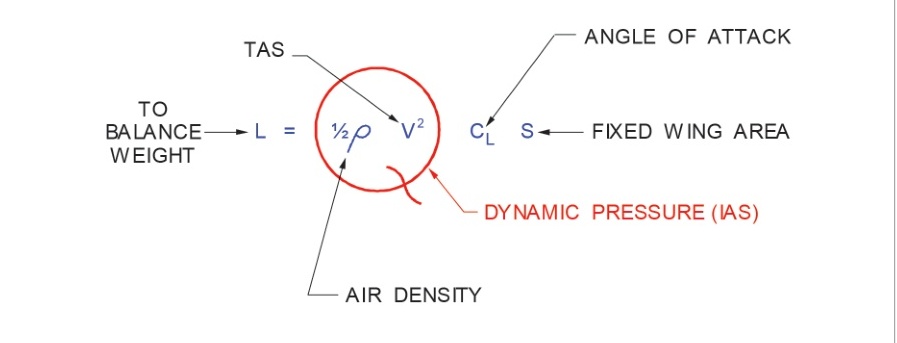
注意:为清晰起见,在对升力公式的初步研究中,我们指出 C L C_L CL主要由攻角决定。这是正确的,但 C L C_L CL也受表面形状或剖面以及其他因素的影响,这些将在后续章节中详细说明。
- 飞机大部分时间处于平直飞行状态。
- 需要多少升力?与重量相等。
- 考虑到在任何时刻重量基本恒定,所以升力也必须保持恒定。
- 在产生所需升力的同时,阻力越小越好,因为阻力必须由推力平衡,而推力需要消耗燃油。
- 升力除以阻力的值是衡量空气动力效率的指标。这在特定攻角下有最大值。对于现代机翼,这大约是 4 ∘ 4^{\circ} 4∘。如果保持这个"最佳"攻角,将获得最大空气动力效率。注意:最大 C L C_L CL和最小 C D C_D CD并非在最佳 L / D L/D L/D处获得。
- 升力由机翼上下表面之间的压力差产生。压力降低是由空气加速流过机翼上表面造成的。机翼面积必须足够大以产生所需的升力。
- 随着高度增加,空气变得稀薄。如果飞机在空气中的速度随着高度增加保持不变,则在给定时间内流过机翼的空气量会减少——升力也会相应减少。
- 为了在高度增加时保持恒定升力,必须保持恒定的质量流量。随着高度增加空气密度降低,机翼在空气中的速度(真空速TAS)必须增加。
如果参考第27页的ICAO标准大气图表,40,000英尺高度的空气密度仅为海平面值的四分之一。我们可以用这个例子来说明随着高度变化空气密度变化时TAS需要的变化关系。
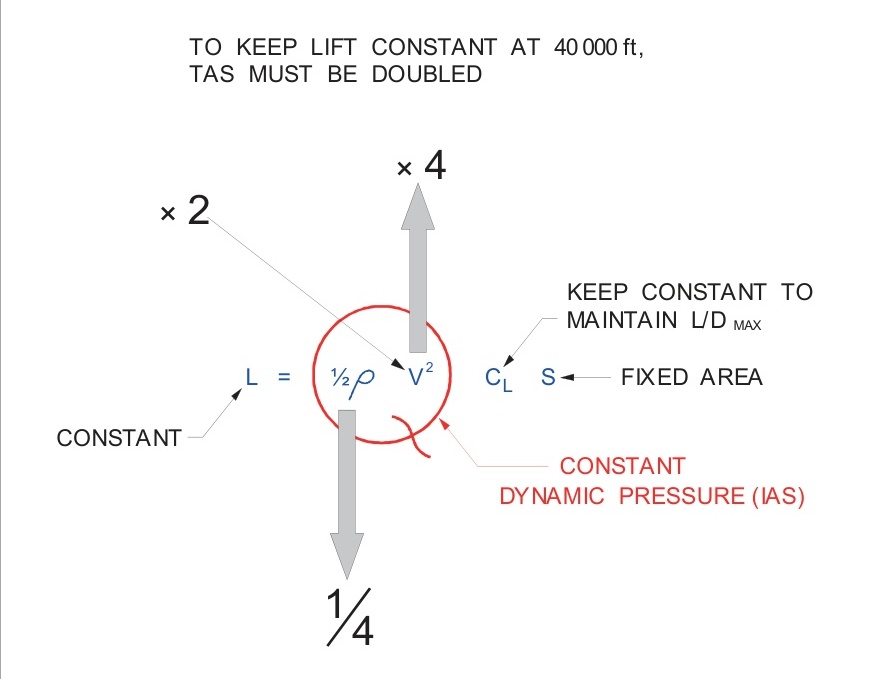
在这个例子中,我们假设为了空气动力效率保持最佳攻角 4 ∘ 4^{\circ} 4∘,且机翼面积恒定。
在40,000英尺高度,空气密度是海平面值的 1 4 \frac{1}{4} 41,所以飞机在空气中的速度必须加倍以保持动压(因此升力)恒定。TAS是平方关系,因为我们本质上是考虑气流的动能 ( KE = 1 2 m V 2 ) \left(\text{KE}=\frac{1}{2} m V^{2}\right) (KE=21mV2)。
升力公式也可用于考虑在恒定高度(空气密度)下速度和攻角之间的关系。
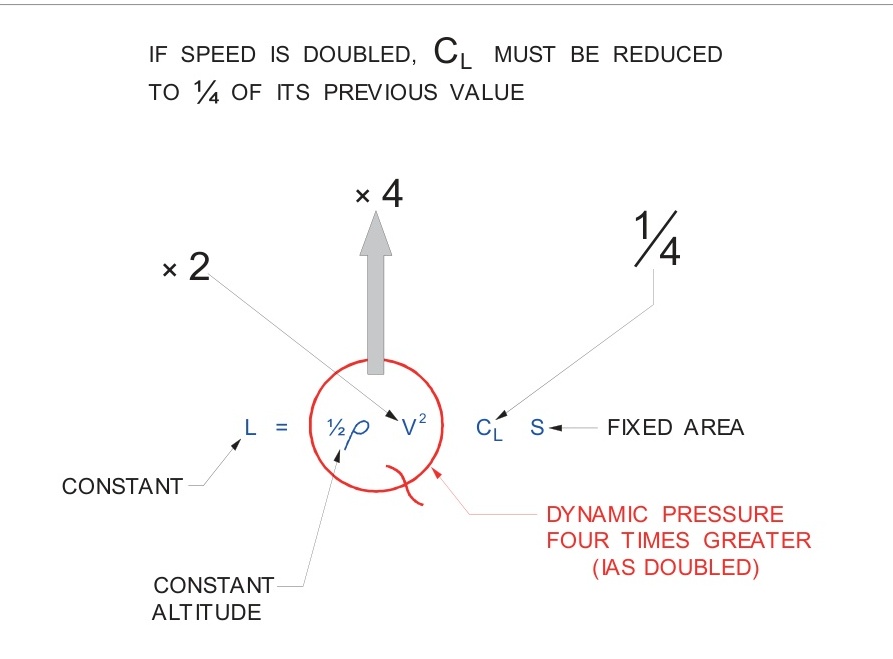 图5.3
图5.3
当速度发生变化时,必须相应调整攻角以保持升力恒定。
举例来说:如果指示空速(IAS)加倍,真空速(TAS)也会随之加倍,此时动压(因为是速度的平方函数)会增加到原来的四倍,升力也会相应增加四倍。因此,当飞机加速时,攻角必须降低,使升力系数 C L C_L CL减少到原来的四分之一,才能维持恒定的升力。
第27页指出,指示空速IAS大致与动压的平方根成正比。IAS与动压之间的关系可表示为:
IAS ∝ Q \text{IAS} \propto \sqrt{Q} IAS∝Q
为了便于理解(尽管在速度超过 M 0.4 M0.4 M0.4时这一简化不再适用),我们可以认为在恒定高度下,真空速TAS与指示空速IAS成正比变化(即一个加倍,另一个也加倍)。
升力公式可以灵活转换,用于计算专业飞行员关心的多种变量。例如:如果在平飞状态下,速度从最小平飞速度增加 30 % 30\% 30%,我们可以计算新的升力系数 C L C_L CL占最大升力系数 C LMAX C_{\text{LMAX}} CLMAX的百分比:
L = 1 2 ρ V 2 C L S L = \frac{1}{2} \rho V^{2} C_L S L=21ρV2CLS
转换为:
C L = L 1 2 ρ V 2 S C_L = \frac{L}{\frac{1}{2} \rho V^{2} S} CL=21ρV2SL
由于空气密度、升力和机翼面积在此情况下都保持恒定,因此可以简化为: C L ∝ 1 V 2 C_L \propto \frac{1}{V^{2}} CL∝V21
比最小平飞速度高 30 % 30\% 30%可表示为 1.3 V 1.3V 1.3V
C L C_L CL的比例变化因此为: 1 ( 1.3 ) 2 = 1 1.69 ≈ 0.59 = 59 % \frac{1}{(1.3)^{2}} = \frac{1}{1.69} \approx 0.59 = 59\% (1.3)21=1.691≈0.59=59%
这意味着,当飞机以比最小平飞速度高 30 % 30\% 30%的速度保持平飞时,所需的升力系数 C L C_L CL仅为最大升力系数 C LMAX C_{\text{LMAX}} CLMAX的 59 % 59\% 59%。
回顾
在平直飞行中,升力必须平衡重量,所以在任何时刻,重量和所需升力是恒定的。
- 如果密度因高度变化而变化,要保持恒定升力,TAS必须相应调整:
- 如果高度增加,密度减小,TAS必须增加。
- 如果高度减小,密度增加,TAS必须减小。
保持恒定IAS将自动补偿密度变化。
-
如果在恒定高度(密度)下改变速度,要保持恒定升力,必须调整攻角:
- 如果速度增加,攻角必须减小(如果速度加倍,攻角必须减小使 C L C_L CL变为原来的四分之一)。
- 如果速度减小,攻角必须增加(如果速度减半,攻角必须增加使 C L C_L CL变为原来的四倍)。
-
通常,选择巡航速度使飞机在最佳攻角(L/DMAX-约 4 ∘ 4^{\circ} 4∘)下运行,以获得最佳空气动力效率。
升力曲线
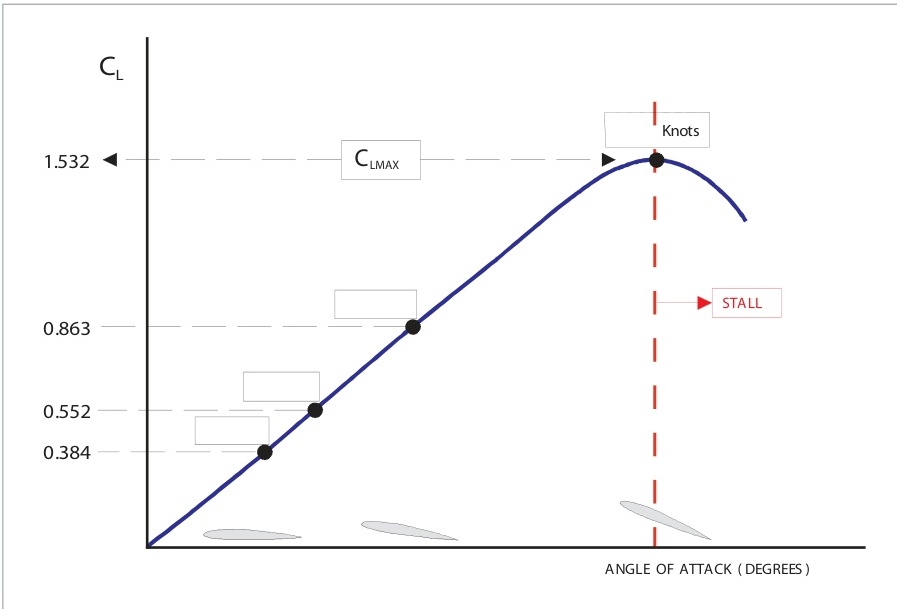
图5.4显示了翼型剖面的升力曲线,升力系数( C L C_L CL)对攻角作图。很明显该剖面是对称的,因为在零攻角时不产生升力。
升力曲线是说明各种构型特性的便捷方式,将在本教材中广泛使用。
升力系数随攻角增加而增加,直到达到最大值 ( C LMAX ) \left(C_{\text{LMAX}}\right) (CLMAX),对应于"临界"攻角。继续增加攻角超过这一点,气流将无法保持其先前在上表面轮廓上的平滑流动,升力将减小。这种现象,即失速,将在后面详细讨论。
升力曲线的解释
- 要产生恒定升力,动压的任何调整都必须伴随着攻角的变化(在 C L C_L CL小于 C LMAX C_{\text{LMAX}} CLMAX时)。
- 对于恒定升力,每个动压需要特定的攻角。
- 最小动压由最大升力系数 ( C LMAX ) \left(C_{\text{LMAX}}\right) (CLMAX)决定,它发生在特定攻角(约 1 6 ∘ 16^{\circ} 16∘)。
- C LMAX C_{\text{LMAX}} CLMAX的攻角对于给定构型是恒定的。
- 如果由于更大的运行重量需要更多升力,需要更大的动压来保持给定攻角。
- 运行重量越大,最小动压越高。
要使用具体数值的升力公式,需要将每个项转换为SI单位。
飞机质量为60,000千克。要转换为重量,必须将质量乘以重力加速度 ( 9.81 m/s 2 ) \left(9.81 \, \text{m/s}^{2}\right) (9.81m/s2)。机翼面积为 105 m 2 105 \, \text{m}^{2} 105m2。密度是ICAO标准大气海平面值 1.225 kg/m 3 1.225 \, \text{kg/m}^{3} 1.225kg/m3。
计算结果的速度将以 m/s \text{m/s} m/s为单位。一海里有6080英尺,一米有3.28英尺。
升力公式: L = 1 2 ρ V 2 C L S L = \frac{1}{2} \rho V^{2} C_L S L=21ρV2CLS
转换为计算速度时,公式变为: V = 2 L ρ C L S V = \sqrt{\frac{2L}{\rho C_L S}} V=ρCLS2L
请回答以下问题:(答案在XX页提供)
- a. 平直飞行需要多少牛顿的升力?
- b. 计算每个高亮显示的升力系数对应的空速(以节为单位)。
- c. 飞机在平飞中可以飞行的最低速度是多少?
- d. 要尽可能慢地平飞,必须使用什么升力系数?
- e. 每个攻角是否需要特定的速度?
- f. 当速度增加时,必须对攻角做什么调整以保持平飞?
- g. 在较高高度,空气密度会更低;如果保持攻角恒定,要保持所需升力必须做什么?
- h. 在恒定高度下,如果速度减半,必须对攻角做什么调整以保持平飞?
使用上图,请回答以下问题:(答案在第100页)
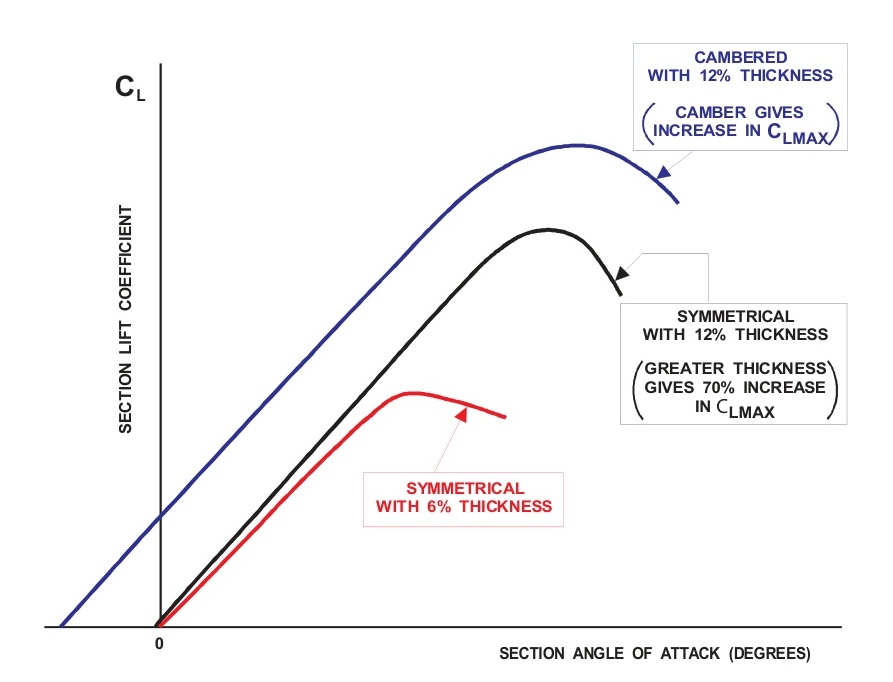
- a. 为什么弯曲翼型剖面有明显更高的 C LMAX C_{\text{LMAX}} CLMAX?
- b. 在相同攻角下,为什么对称翼型剖面比弯曲翼型剖面产生更少的升力?
- c. 为什么 12 % 12\% 12%厚度的弯曲翼型剖面在略微负攻角时产生少量升力?
- d. 对于给定攻角, 6 % 6\% 6%厚度的对称翼型剖面产生最小的升力。这在哪些方面可能是有利特性?
- e. 6 % 6\% 6%厚度对称翼型剖面的缺点是什么?
速度-动压关系
理解力方程中使用的速度与动压之间的关系至关重要。力方程中的速度是飞机相对于其穿越的空气的速度——真空速(TAS)。
在给定攻角下:“对于恒定升力,必须保持恒定动压”。当飞机在非海平面ISA空气密度的高度飞行时,TAS必须按照空气密度变化的比例进行调整。随着高度增加,TAS必须增加以保持相同的动压 ( Q = 1 2 ρ V 2 ) \left(Q=\frac{1}{2} \rho V^{2}\right) (Q=21ρV2)。
密度高度
空气密度对飞机的起飞和着陆性能有着显著影响。在低密度空气中,飞机需要更长的起飞滑跑距离。空气密度是由气压、温度和湿度共同决定的。值得注意的是,湿度会降低空气密度,因为水蒸气的密度约为干空气的 5 8 \frac{5}{8} 85。
在海平面标准气压的机场,当高度表设置为1013百帕时,高度表读数显示为零。这被称为"压力高度",但这一概念可能具有误导性,因为动压取决于真空速和空气密度,而非仅仅取决于气压。如果当地温度高于标准值,实际空气密度将会降低,而这一情况在仪表上并无直接显示。例如,当温度为 2 5 ∘ C 25^{\circ}C 25∘C时,比标准温度高出 1 0 ∘ C 10^{\circ}C 10∘C( 25 − 15 = 10 25-15=10 25−15=10)。此时的空气密度相当于更高高度的密度,这就是所谓的"密度高度"。
在实际飞行中,这意味着飞机在给定动压下需要更高的真空速,因此需要更长的起飞滑跑才能达到所需的指示空速。
要记住"密度高度"的含义,可以将其理解为"高密度高度"。
翼型剖面升力特性
图5.5展示了不同厚度和弯度组合的翼型剖面所产生的 C L C_L CL与攻角关系图。
- 增加对称翼型的厚度可获得更高的 C LMAX C_{\text{LMAX}} CLMAX。
- 引入弯度对提高 C LMAX C_{\text{LMAX}} CLMAX也有积极影响。
最大升力系数的重要性不言而喻: C LMAX C_{\text{LMAX}} CLMAX越大,最小飞行速度(失速速度)就越低。然而,为获得高 C LMAX C_{\text{LMAX}} CLMAX所需的厚度和弯度会在高速飞行时产生更大的形状阻力和扭矩。因此,高 C LMAX C_{\text{LMAX}} CLMAX只是翼型剖面设计中的一项要求。关键在于高 C LMAX C_{\text{LMAX}} CLMAX能够提供更低的最小飞行速度(指示空速)。
如果仅为获得更低的最小飞行速度而使用大弯度翼型剖面,则会因过高的阻力而降低有效巡航速度。更为理想的方案是采用在高巡航速度下高效的翼型剖面,并在需要低速飞行时临时增加机翼弯度。这可通过使用机翼前缘和后缘的可调铰接部分(襟翼)来实现。
阻力特性简介
阻力是平行于相对气流并与飞行路径方向相反的空气动力。(阻力作为一个完整主题,将在后续章节中详细讨论)。与其他空气动力一样,阻力也可以用独立于动压和表面积的系数形式表示。
D = Q C D S D = Q C_D S D=QCDS
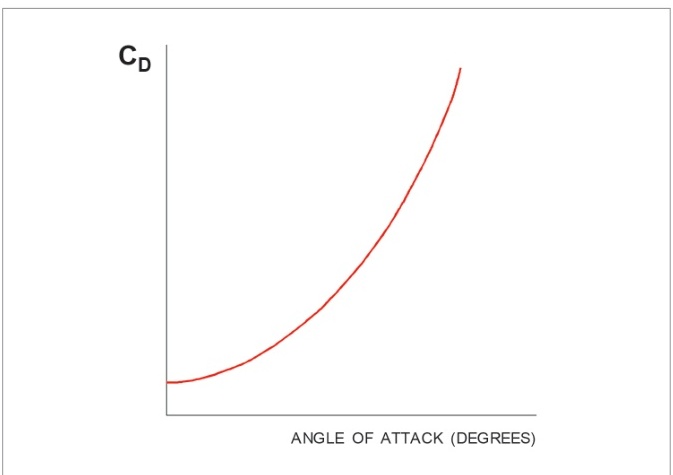
阻力是动压、阻力系数和表面积的乘积。 C D C_D CD表示单位机翼面积阻力与动压的比率。如果将典型机翼的 C D C_D CD对攻角作图,结果通常如图5.6所示。在低攻角下, C D C_D CD值较小,攻角的微小变化仅导致 C D C_D CD的轻微变化。但在较高攻角下, C D C_D CD随攻角的变化率增大; C D C_D CD与攻角的关系呈指数增长。当超过失速攻角 ( C LMAX ) \left(C_{\text{LMAX}}\right) (CLMAX)后, C D C_D CD会进一步急剧增加。
升阻比
通过研究升力与阻力之间的比率,我们可以了解升力产生的效率,较高的 L / D L/D L/D比表示更高的效率。
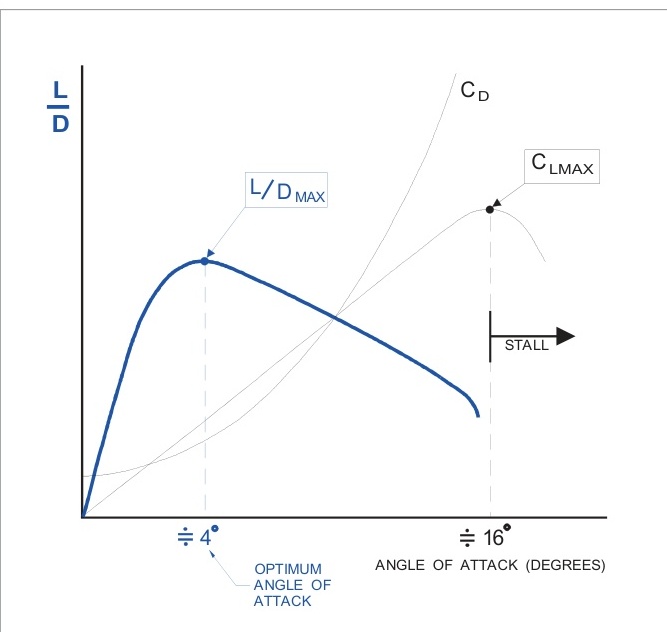
对每个攻角都可以计算出相应的 C L C_L CL和 C D C_D CD比值。图5.7显示 L / D L/D L/D比随攻角增加而上升,直至约 4 ∘ 4^{\circ} 4∘达到最大值;这被称为"最佳"攻角。此后, L / D L/D L/D比随攻角增加而下降,直至达到 C LMAX C_{\text{LMAX}} CLMAX。
注意:图5.7中的升力图、阻力图和 L / D L/D L/D比图使用了不同的比例尺,不应从图线交叉处得出结论。
特定翼型剖面的最大升阻比 ( L / D MAX ) \left(L/D_{\text{MAX}}\right) (L/DMAX)会在一个特定攻角处出现。如果飞机在最佳攻角下保持平飞状态,则在产生所需升力的同时阻力将最小。任何偏离 L / D MAX L/D_{\text{MAX}} L/DMAX攻角的飞行都会降低 L / D L/D L/D比,从而增加产生所需升力时的阻力。
假设图5.7中的 L / D MAX L/D_{\text{MAX}} L/DMAX为12.5。在588,600牛重量下稳定飞行,当指示空速产生 4 ∘ 4^{\circ} 4∘攻角所需的升力时,阻力将为47,088牛( 588 , 600 ÷ 12.5 588,600 \div 12.5 588,600÷12.5)。任何更高或更低的速度都需要不同的攻角来产生所需升力。任何偏离 4 ∘ 4^{\circ} 4∘的攻角都会产生超过47,088牛的阻力。当然,同一"飞机"可以在不同重量下运行,相同的$L/D_{\text{MAX}} 12.5 可在相同攻角下获得。但重量变化需要调整指示空速以在相同攻角下支持新的重量。重量越低,保持 12.5可在相同攻角下获得。但重量变化需要调整指示空速以在相同攻角下支持新的重量。重量越低,保持 12.5可在相同攻角下获得。但重量变化需要调整指示空速以在相同攻角下支持新的重量。重量越低,保持L/D_{\text{MAX}}$攻角所需的指示空速越低,反之亦然。
对于给定构型(襟翼、起落架、扰流板和机身污染)且速度低于 M 0.4 M0.4 M0.4时,重量变化不会改变 L / D MAX L/D_{\text{MAX}} L/DMAX。
飞机设计对 L / D L/D L/D比有显著影响。下表列出了各种类型飞机的典型值。
| 飞机类型 | L/D MAX范围 |
|---|---|
| 高性能滑翔机 | 25至60 |
| 现代喷气运输机 | 12至20 |
| 螺旋桨动力训练机 | 10至15 |
飞机重量对最小飞行速度的影响
给定翼型剖面总是在相同攻角下失速,但飞机重量会影响失速发生时的指示空速。现代大型喷气运输机的最大起飞总重量中可能有一半以上是燃油。因此,失速速度在整个飞行过程中可能会有相当大的变化。
表面状况
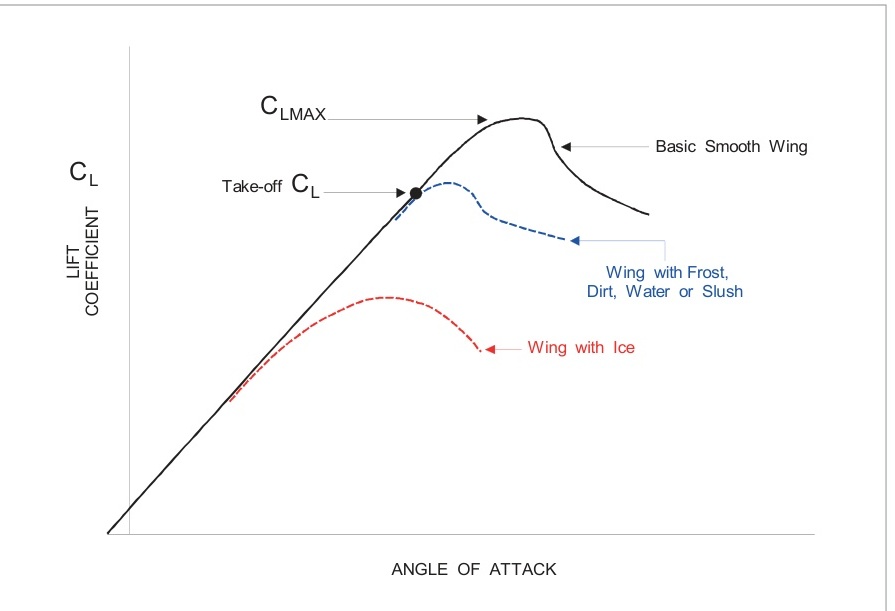
表面不规则性,尤其是靠近前缘的部分,对翼型剖面特性有显著影响。特别是 C LMAX C_{\text{LMAX}} CLMAX对前缘粗糙度非常敏感。图5.8展示了粗糙前缘与光滑表面相比的影响。一般而言, C LMAX C_{\text{LMAX}} CLMAX随前缘粗糙度的增加而逐渐降低。从前缘算起超过弦长约20%的下游粗糙度对 C LMAX C_{\text{LMAX}} CLMAX或升力曲线斜率影响较小。霜、雪甚至雨水都可能显著增加表面粗糙度。从受污染的停机坪、滑行道和跑道上沾染的污垢或雪泥也可能产生严重影响。飞行中结冰通常积累在机翼前缘,会大幅增加表面粗糙度,导致 C LMAX C_{\text{LMAX}} CLMAX显著降低。
高升力条件下的飞行
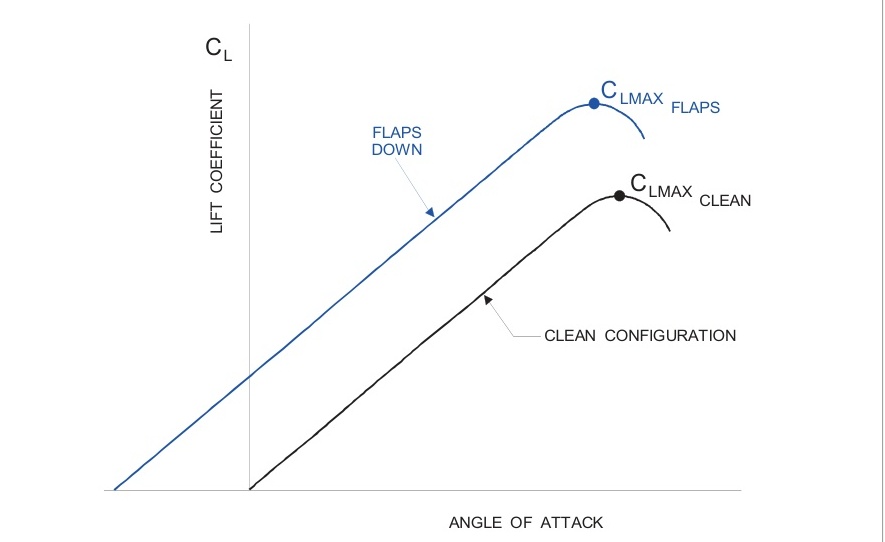
飞机的空气动力升力特性可通过图5.9中干净构型和放下襟翼构型下的升力系数对攻角曲线来表示。特定空气动力构型的升力系数随攻角增加而增加,直至获得最大升力系数。进一步增加攻角会导致失速,升力系数随后减小。
高升力装置的影响
高升力装置(襟翼、缝翼、前缘缝翼等)的主要目的是通过增加翼型剖面的 C LMAX C_{\text{LMAX}} CLMAX来缩短起飞和着陆距离,从而降低最小速度。图5.9的升力曲线展示了"典型"高升力装置的影响。襟翼展开的主要作用是增加 C LMAX C_{\text{LMAX}} CLMAX并减少任何给定升力系数所需的攻角。襟翼偏转提供的 C LMAX C_{\text{LMAX}} CLMAX增加按一定比例降低了失速速度。(高升力装置将在后续章节中全面介绍)。
三维气流
迄今为止,我们只考虑了二维气流。这是理解飞机实际气流模式的基础。即使是微小的压力差也会通过引导空气流向低压区域来改变气流方向。三维气流会修改有效攻角,增加阻力,改变失速特性,并可能影响飞机的控制和稳定性。从现在开始,我们将考虑整个机翼,而非仅仅是翼型剖面。
机翼术语
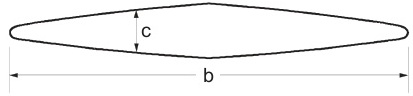
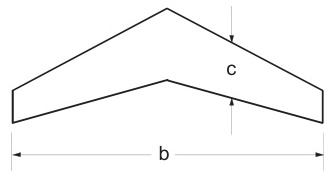
机翼面积(S):机翼的平面表面积。虽然部分面积可能被机身或发动机短舱覆盖,但这些表面上的压力延续允许我们合理地考虑整个平面面积。
翼展(b):从翼尖到翼尖的距离。
平均弦长(c):平均几何弦长。翼展与平均弦长的乘积即为机翼面积 ( b × c = S ) (b \times c = S) (b×c=S)。
展弦比(AR):翼展与平均弦长的比值 ( AR = b c ) (\text{AR} = \frac{b}{c}) (AR=cb)。如果平面形状有曲率且平均弦长不易确定,可使用替代表达式 b 2 S \frac{b^{2}}{S} Sb2。机翼的展弦比决定了其空气动力特性和结构重量。典型展弦比从高性能滑翔机的35到喷气战斗机的3不等。现代高速喷气运输机的展弦比约为12。
根弦长 ( C R ) (C_R) (CR):机翼中心线处的弦长。
翼尖弦长 ( C T ) (C_T) (CT):机翼翼尖处的弦长。
锥度比 ( C T C R ) \left(\frac{C_T}{C_R}\right) (CRCT):翼尖弦长与根弦长的比值。锥度比影响升力分布和机翼的结构重量。矩形机翼的锥度比为1.0,而尖端三角翼的锥度比为0.0。
后掠角:通常测量为25%弦线与根弦垂线之间的角度。机翼的后掠会显著改变可压缩性、最大升力和失速特性。
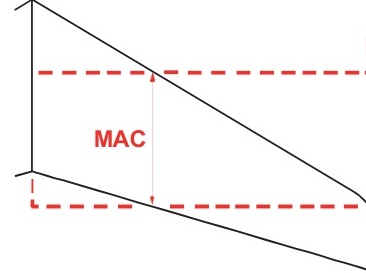
平均空气动力弦长(MAC):具有这种弦长和相同翼展的矩形机翼将具有大致相似的俯仰力矩特性。MAC位于飞机的参考轴上,是纵向稳定性考虑的主要参考点。
翼尖涡流
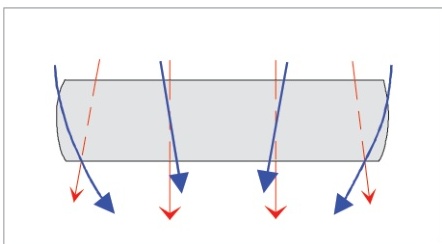
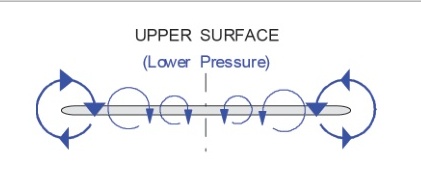

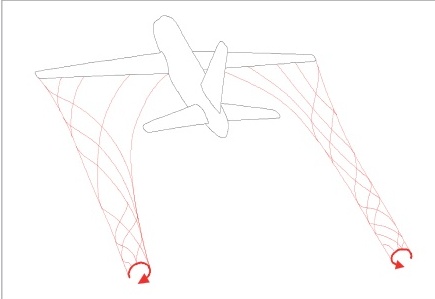
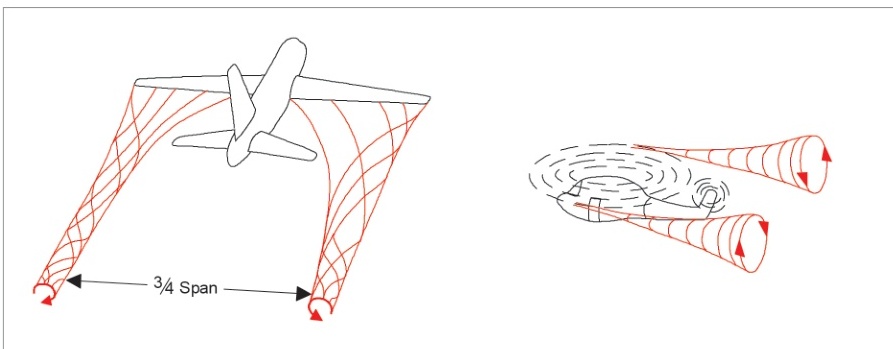
流过机翼上表面的空气压力低于下表面。后缘和翼尖是气流相互作用的区域。压力差改变了流动方向,在上表面产生指向根部的展向分量,而在下表面通常产生指向翼尖的分量,如图5.11所示。从飞机后方观察,右翼尖会产生逆时针涡流,左翼尖会产生顺时针涡流,如图5.12、图5.13和图5.14所示。
在较高攻角(较低指示空速)下,减小的弦向分量会增强合成展向流的效果,使涡流更为强烈。
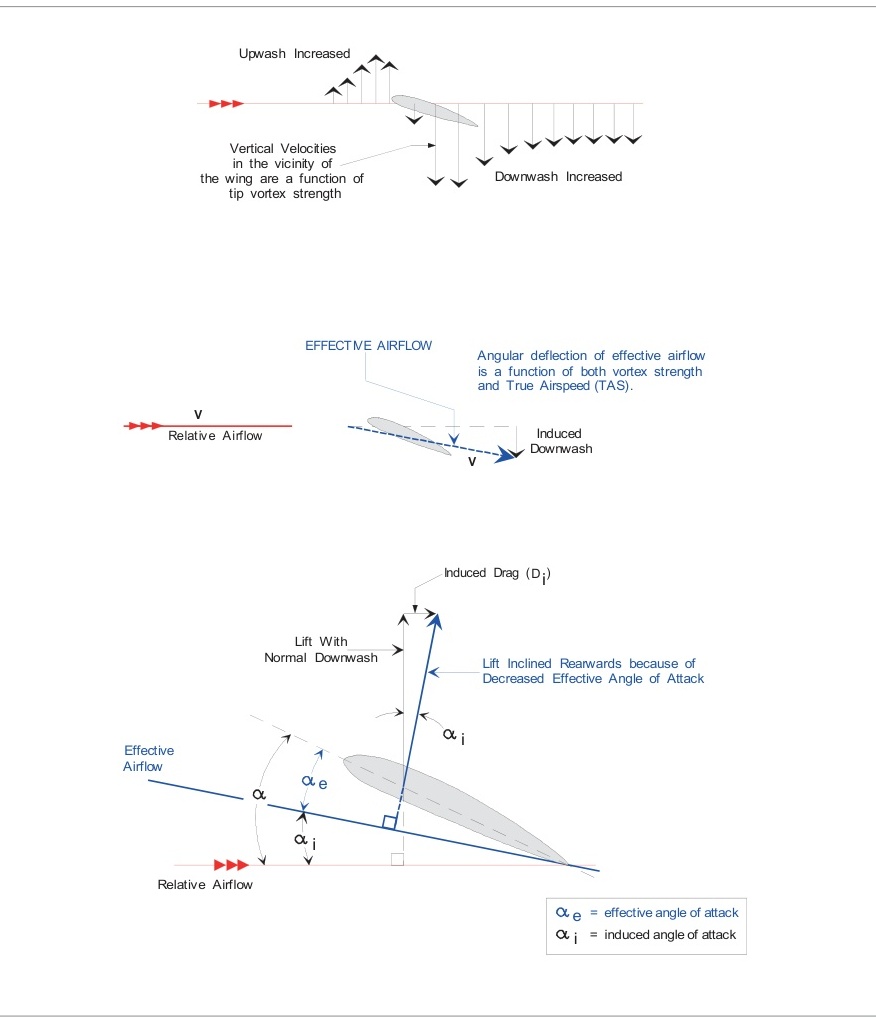
诱导下洗
尾涡在机翼附近的气流中产生特定的垂直速度分量,包括机翼前方和后方。这些垂直速度导致机翼上方产生下洗,从而减小有效攻角。涡流越强,有效攻角的减小越显著。由于这种局部有效攻角的减小,机翼产生的总升力将低于没有展向压力差时产生的值。升力的产生本身减小了所产生升力的大小。为了补偿因增加下洗而损失的升力,飞机必须以更高的攻角飞行。这会增加阻力。这种额外的阻力称为诱导阻力。涡流越强,诱导阻力越大。
翼尖涡流,特别是它们对上洗和下洗的影响,对飞机空气动力学、稳定性和控制的多个重要方面有显著影响。这些影响将在本章和后续章节中详细探讨。
尾流湍流:(参考:AIC P 072/2010)
尾随翼尖涡流在飞机后方延伸相当长的距离,对不幸遇到它们的任何飞机都可能构成极大危险。在大型飞机后方,涡流系统中的最大切向空速可能高达90 m/s(300 ft/sec)。尾流湍流无法被探测到,因此飞行员了解尾涡的潜在分布和持续时间,以及表面风速和风向对"经典"涡流系统的影响非常重要。
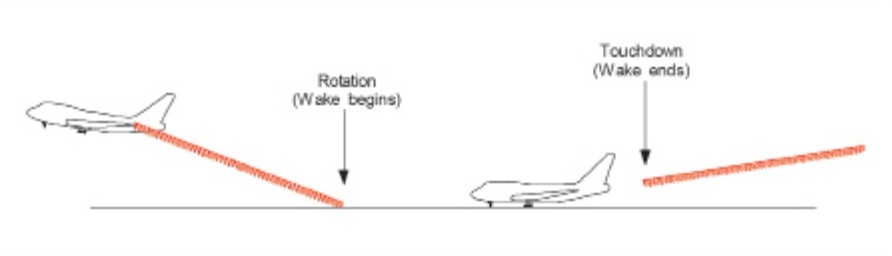
飞机尾流涡流特性
尾流涡流的产生始于起飞时前轮离地,一直持续到着陆时前轮接地。每架飞机(包括直升机)在飞行中都会产生尾流涡流,但大型飞机产生的涡流最为严重。它们在起飞、初始爬升、最终进近和着陆阶段构成最大危险——也就是在低高度处,大量飞机聚集的区域。尾流湍流遭遇是一种危险,因为可能导致失控和结构损坏,如果在靠近地面时发生,可能没有足够的时间和/或高度从不稳定状态中恢复。
尾流涡流的特性由"产生"飞机的以下因素决定:
- 总重量 - 重量越大,涡流越强。
- 翼展 - 影响两个尾涡的间距。
- 空速 - 速度越低,涡流越强。
- 构型 - 飞机处于"干净"构型时涡流强度最大(在给定速度和重量下)。
- 姿态 - 攻角越高,涡流越强。
一般规则是,相对于遭遇尾流湍流的飞机,"产生"涡流的飞机越大,危险越大。研究还表明,在给定重量和速度下,直升机产生的涡流比固定翼飞机更强。
尾涡分布
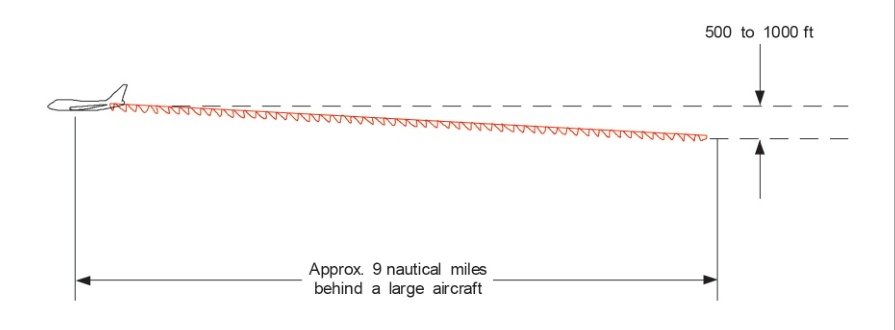
通常,两个尾涡保持在约为飞机翼展四分之三的距离,在静止空气中,它们倾向于缓慢下降并保持水平,通常在飞机飞行路径下方500至1000英尺处。在大型飞机后方,尾涡可延伸达九海里。
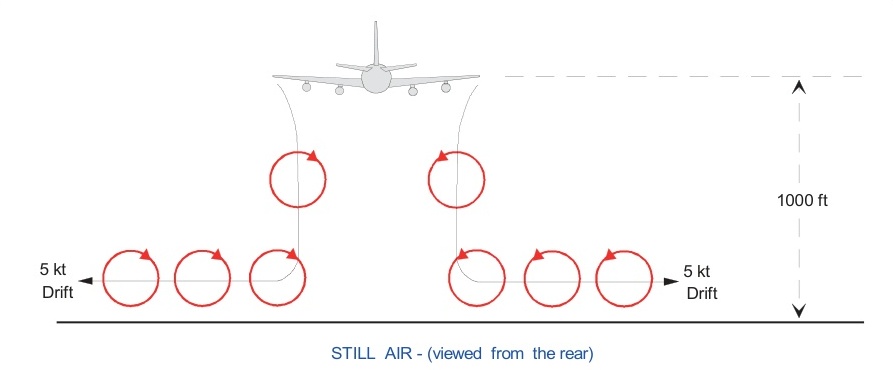
涡流在地面附近的运动
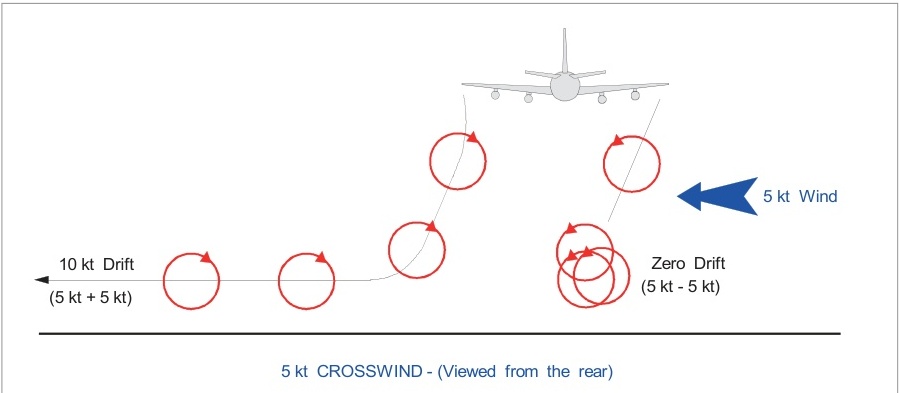
图5.19显示,如果产生涡流的飞机在地面1000英尺以内,两个涡流将"接触"地面并以约5节的速度从产生飞机的航迹向外移动,高度约等于飞机翼展的一半。
在侧风条件下,如果地面风轻且稳定,"接触"地面的尾流涡流系统将随风漂移。图5.20展示了侧风对靠近地面的涡流运动的可能影响。对于平行跑道,在一条跑道上运行的飞机产生的尾流湍流可能对在另一条跑道上运行的飞机构成潜在危险。
尾涡的衰减过程
大气湍流对尾涡衰减影响最大,风越强,衰减越快。
遭遇尾流湍流的概率
空中交通管制(ATC)应用某些间隔最小值,但这不能保证完全避免遭遇。ATC应用的间隔仅将遭遇概率降低到较低水平,并可能在发生遭遇时最小化不稳定的幅度。在跟随任何明显更重的飞机时应特别小心,尤其是在轻风条件下。大多数靠近地面的严重事件发生在风力较小的情况下。
尾流湍流避让
如果能够预判前方或交叉飞机后方尾涡的位置,适当的飞行路径控制将最大限度地减少遭遇尾流湍流的可能性。保持在前方或交叉飞机的上方和/或上风处通常能使您的飞机远离产生飞机的尾流涡流。然而,为了保持在前方飞机飞行路径的上方/上风处而偏离已发布的进近和离场程序可能并不明智。保持适当的间隔仍然是避免遭遇尾流湍流的最佳策略。
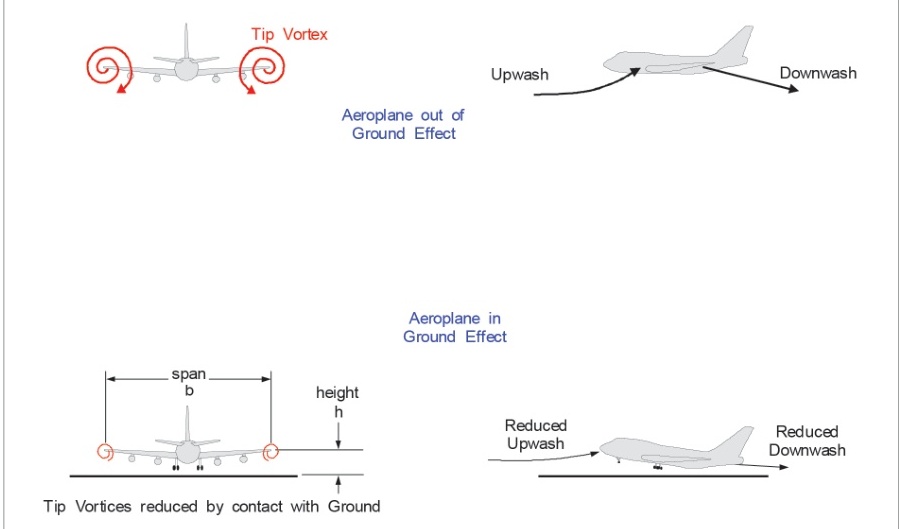
地面效应
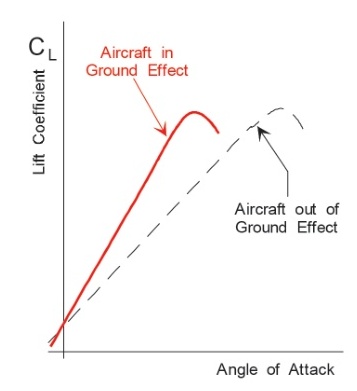
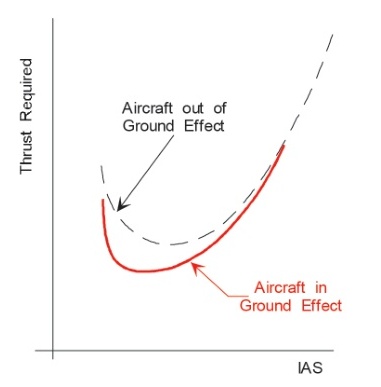
在着陆和起飞时,机翼靠近地面会阻止尾涡的完全发展,如图5.21所示,使它们变得更弱。上洗和下洗减少,导致机翼的有效攻角增加(参考图5.15)。因此,当飞机处于"地面效应"中时,升力通常会增加,诱导阻力 ( C D i ) (C_{Di}) (CDi)会减少。此外,减少的下洗会影响纵向稳定性(因为压力中心移动)和俯仰力矩(因为尾翼有效攻角的变化)(参考图5.23)。
地面效应的影响
地面效应的影响取决于机翼高于地面的距离。只有当机翼非常接近地面(在翼展的一半以内)时, C D i C_{Di} CDi才会有显著减少。
对于一架翼展为 40 m 40 \, \text{m} 40m的典型飞机(参考图5.22):
- 在高度为 40 m 40 \, \text{m} 40m时, C D i C_{Di} CDi的减少仅为 1.4 % 1.4\% 1.4%。
- 在高度为 10 m 10 \, \text{m} 10m时, C D i C_{Di} CDi的减少为 23.5 % 23.5\% 23.5%。
- 在高度为 4 m 4 \, \text{m} 4m时, C D i C_{Di} CDi的减少高达 47.6 % 47.6\% 47.6%。
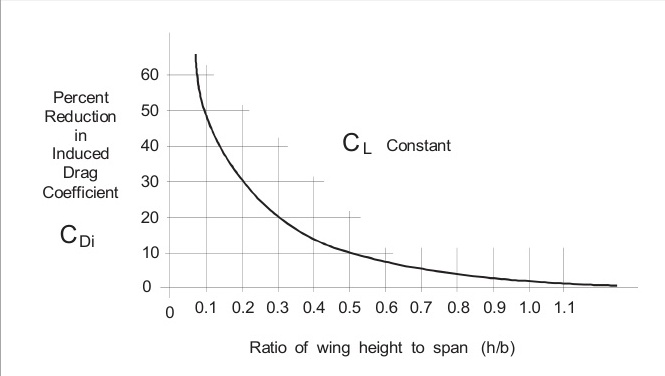
飞机处于着陆姿态时机翼高于地面的高度受其在机身上的安装位置影响。从图5.22的图表可以看出,最后几米对 C D i C_{Di} CDi的减少有显著影响。一般而言,低翼飞机比高翼飞机会经历更强的地面效应。
高尾翼和低尾翼特性
虽然地面效应可能会改变尾翼本身的空气动力特性,但低位尾翼的有效攻角会因机翼后方下洗角的变化而修改。高位尾翼可能不受变化下洗角的影响,因此不会遭受相同的不利影响。
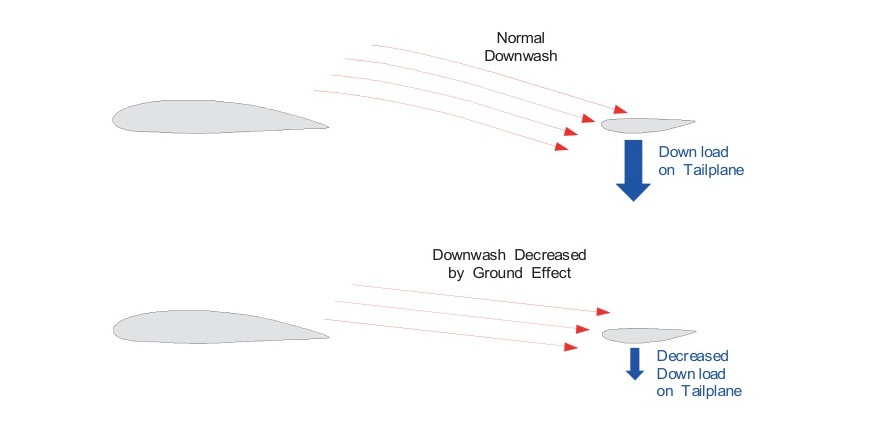
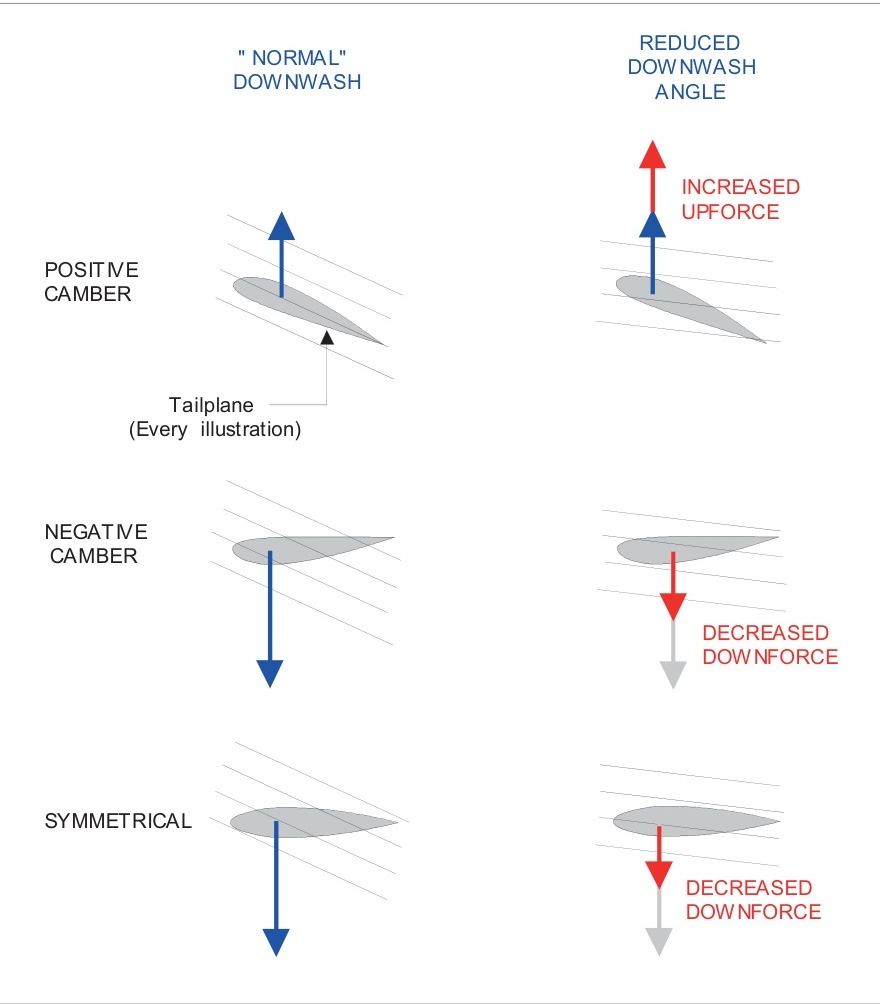
尾翼弯度对俯仰力矩的影响
从图5.24可以看出,当机翼下洗发生变化时,尾翼弯度类型不会影响产生的俯仰力矩。下洗减少总是会导致飞机机头向下的俯仰力矩。增加下洗则会产生相反的效果。
下洗不仅会因地面效应而改变,还会在襟翼操作时以及当速度高于McRIT时机翼上形成激波时发生变化,因此理解这一现象是全面理解飞行原理的关键要素。
尾翼攻角
攻角是弦线与相对气流之间的角度。相对气流具有三个特性:
- 大小 - 飞机穿过空气的速度;真空速(TAS)
- 方向 - 与飞机飞行路径平行且方向相反,以及
- 状态 - 不受飞机存在的影响。
从机翼后缘流出的空气(下洗)不能被定义为相对气流,因为它不符合定义。同样,也不能严格地考虑尾翼攻角。受飞机存在影响的气流(流动方向和动压)必须被视为有效气流。弦线与有效气流之间的角度必须被视为有效攻角。
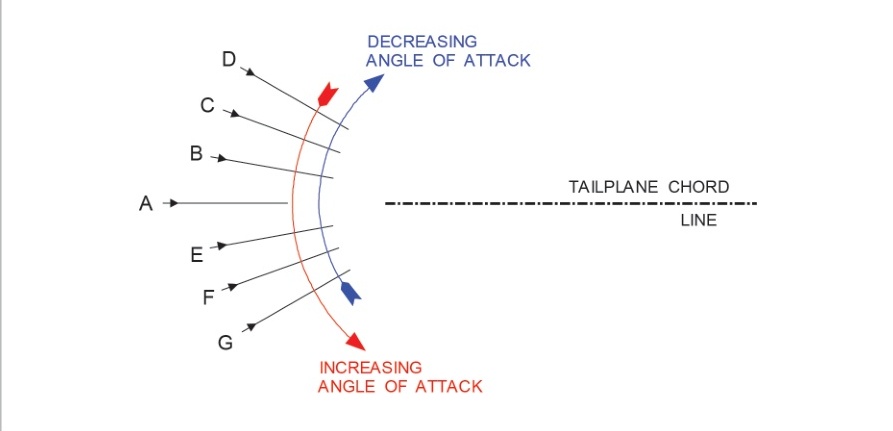
考虑图5.25。来自A方向的气流使尾翼的(有效)攻角为零。来自E、F或G方向的气流将增加(有效)攻角。如果现在考虑来自G方向的气流,来自F、E、A、B、C或D的流动将减少(有效)攻角。不使用"负攻角"一词。
结论
增加下洗(G到D)会导致尾翼(有效)攻角减小,而减少下洗(D到G)会导致尾翼(有效)攻角增加。
理解下洗变化对尾翼攻角的影响是必要的,但理解下洗对飞机俯仰力矩的影响至关重要。
进入地面效应
考虑一架进入地面效应的飞机,假设保持恒定的 C L C_L CL和IAS。当飞机下降进入地面效应时,将发生以下变化:
-
下洗减少会导致有效攻角增加,需要较小的机翼攻角来产生相同的升力系数。如果在遇到地面效应时保持恒定的俯仰姿态,可能会因 C L C_L CL增加和 C D i C_{Di} CDi(推力需求)减少而感到"漂浮"。
-
诱导阻力的减少将导致减速减小,任何多余的速度可能导致相当长的"漂浮"距离。推力需求的减少也可能使飞机有上升到所需下滑路径之上的趋势,如果不减小油门设置,可能会出现"气球"效应。
-
如果在短距离进近期间允许空速显著衰减,并通过增加攻角来阻止下沉率,那么在进入地面效应时,机翼可能会失速,导致重着陆。
-
飞行员可能需要增加俯仰输入(更多的升降舵后压)来保持所需的着陆姿态。这是因为下洗减少增加了尾翼的有效攻角。尾部的向下载荷减少,产生机头向下的俯仰力矩。
-
由于飞机周围流场的变化,位置误差会发生变化,可能导致ASI读数错误。在大多数情况下,静压口处的局部压力会增加,导致ASI和高度表读数偏低。
离开地面效应
离开地面效应的影响通常与进入时相反。考虑一架在保持恒定 C L C_L CL和IAS的同时爬升离开地面效应的飞机。当飞机爬升离开地面效应时,将发生以下变化:
-
C L C_L CL将减小, C D i C_{Di} CDi(推力需求)将增加。飞机需要增加攻角以保持相同的 C L C_L CL。
-
下洗增加通常会产生机头向上的俯仰力矩。飞行员的俯仰输入可能需要减少(减少升降舵后压)。
-
位置误差变化可能导致ASI读数错误。在大多数情况下,静压口处的局部压力将减小,导致ASI和高度表读数偏高。
-
在地面效应中可能以一种空速和攻角起飞,而这种空速和攻角在离开地面效应后会导致飞机重新落回跑道。因此,使用正确的起飞速度至关重要。
-
机头向上的俯仰力矩可能导致无意中过度抬头和尾部撞击。
总结
三个主要因素影响所需升力的产生:
- 动压(IAS)。
- 压力分布(剖面形状和攻角)。
- 机翼面积(S)。
为提供恒定的升力,每个IAS对应一个特定的攻角。
C LMAX C_{\text{LMAX}} CLMAX时的攻角是恒定的。
较高的飞机重量需要增加升力来平衡;需要增加IAS以在相同攻角下提供更大的升力。
随着高度增加,恒定IAS将在给定攻角下提供相同的升力。
较薄的机翼在给定攻角下产生较少的升力,并具有较高的最小速度。
较薄的机翼在激波形成增加阻力之前可以飞得更快。
较薄的机翼需要高升力装置才能有可接受的低最小速度。
升阻比是空气动力效率的衡量标准。
机翼表面的污染,特别是弦长前20%,将严重降低空气动力性能。
翼尖涡流:
- 减少总体升力产生。
- 增加阻力。
- 修改下洗,改变尾翼的有效攻角。
- 产生对遇到它们的飞机构成严重危险的尾涡。
- 影响机翼的失速特性。
- 改变升力分布。
在起飞和着陆过程中必须预料到涡流的突然完全影响或其缺失。
第XX1页答案
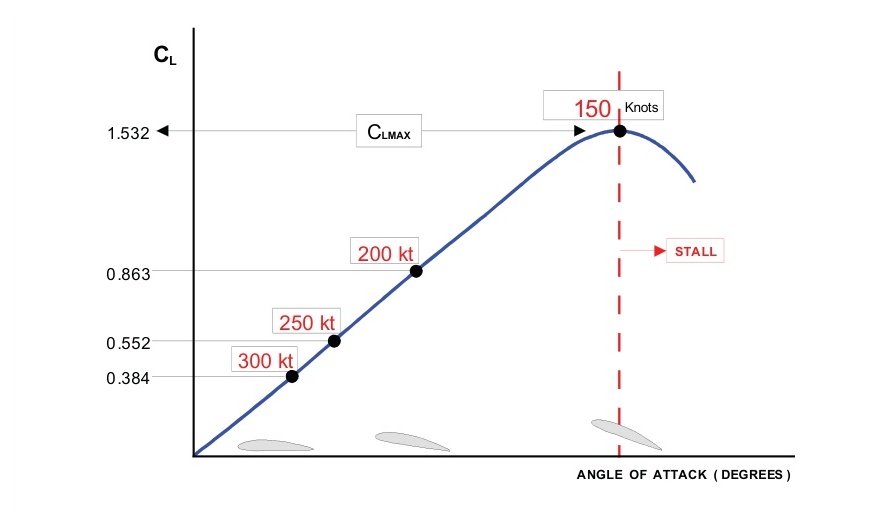 图5.27
图5.27
a. 直线平飞需要多少牛顿的升力?588,600牛。
b. 计算每个高亮升力系数对应的空速(节)。如上所述。
c. 飞机在平飞中可以飞行的最低速度是多少? 150 节 150 \, \text{节} 150节。
d. 要以尽可能低的速度平飞,必须使用什么升力系数? C LMAX C_{\text{LMAX}} CLMAX。
e. 每个攻角是否需要特定的速度?是的。
f. 随着速度增加,必须对攻角做什么调整以保持平飞?攻角必须减小。
g. 在较高高度,空气密度较低;为保持所需升力必须做什么?增加真空速(TAS)。
h. 在恒定高度下,如果速度减半,必须对攻角做什么调整以保持平飞?增加攻角使 C L C_L CL增加四倍。
第XX2页答案
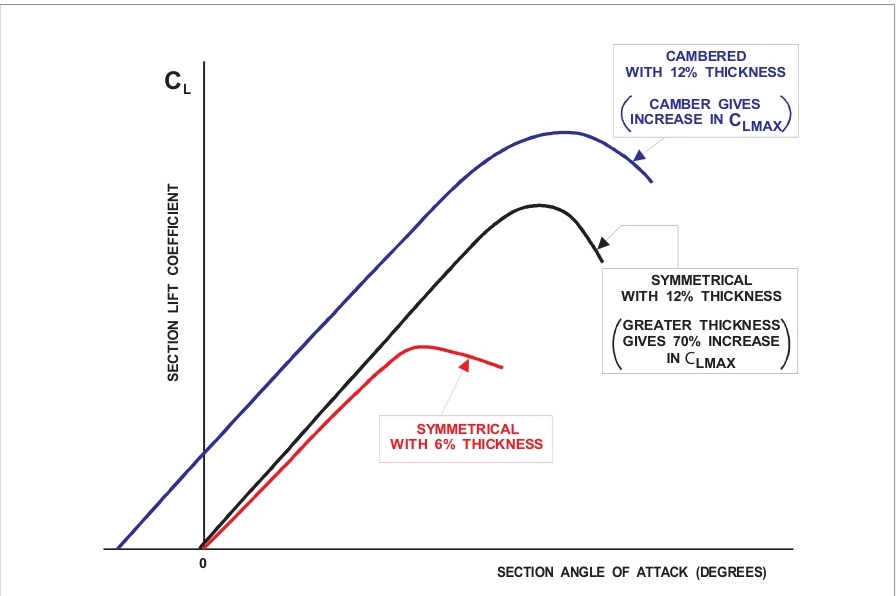 图5.28
图5.28
a. 为什么弯度翼型剖面具有明显更高的 C LMAX C_{\text{LMAX}} CLMAX?与相同厚度的对称剖面相比:在大约相同的失速角度下,上表面流管的横截面积较小,截面变化更加渐进。这允许空气在上表面加速更大,产生更大的压力差。
b. 在相同攻角下,为什么对称翼型剖面产生的升力比弯度翼型剖面少?攻角是弦线与相对气流之间的角度。在相同攻角下,对称剖面上表面流管的横截面积更大。
c. 为什么12%厚度的弯度翼型剖面在略微负攻角下仍能产生少量升力?在小的负攻角下,弯度翼型仍然在上表面提供横截面积减小的流管,产生小的压力差。
d. 对于给定攻角,6%厚度的对称翼型剖面产生最小的升力。这在哪些方面可能是有利特性?在现代高速喷气运输机运行的高速下,薄翼可以在激波形成导致的最小阻力下产生所需的升力。(这将在后续章节中详细解释)。
e. 6%厚度的对称翼型剖面有什么缺点?它将给出较高的最小速度,需要复杂的高升力装置才能使飞机使用现有跑道。
问题
-
为保持高度,随着指示空速(IAS)减小必须做什么?
a. 减小攻角以减少阻力。
b. 增加攻角以保持正确的升力。
c. 部署减速板以增加阻力。
d. 减小推力。
-
如果因为更大的运行重量需要更多升力,要以对应 C LMAX C_{\text{LMAX}} CLMAX的攻角飞行必须做什么?
a. 增加攻角。
b. 什么都不做, C LMAX C_{\text{LMAX}} CLMAX的攻角是恒定的。
c. 不可能以对应 C LMAX C_{\text{LMAX}} CLMAX的攻角飞行。
d. 增加指示空速(IAS)。
-
以下哪个说法是正确的?
1- 要产生恒定升力,IAS的任何调整必须伴随攻角的变化。
2- 对于恒定升力,每个IAS需要特定的攻角。
3- 最小IAS由 C LMAX C_{\text{LMAX}} CLMAX决定。
4- 运行重量越大,最小IAS越高。
a. 1、2和4。
b. 仅4。
c. 2、3和4。
d. 1、2、3和4。
-
在高海拔机场着陆对地速有什么影响,假设温度、风和飞机重量条件相当?
a. 比低海拔高。
b. 与低海拔相同。
c. 比低海拔低。
d. 动压在任何高度都相同。
-
当飞机离开地面效应时应该预期什么飞行状态?
a. 寄生阻力减小,允许较低的攻角。
b. 诱导阻力增加,需要较高的攻角。
c. 动态稳定性增加。
d. 诱导阻力减小,需要较小的攻角。
-
如果攻角和其他因素保持不变,而空速加倍,升力将:
a. 增加两倍。
b. 增加四倍。
c. 保持不变。
d. 变为四分之一。
-
随着高度增加,应使用什么真空速和攻角来产生相同的升力?
a. 对于任何给定攻角,更高的真空速。
b. 相同的真空速和攻角。
c. 较低的真空速和较高的攻角。
d. 恒定的攻角和真空速。
-
飞机如何在地面效应中产生与地面效应外相同的升力?
a. 较低的攻角。
b. 较高的攻角。
c. 相同的攻角。
d. 相同的攻角,但较低的IAS。
-
通过改变机翼的攻角,飞行员可以控制飞机的:
a. 升力和空速,但不能控制阻力。
b. 升力、总重量和阻力。
c. 升力、空速和阻力。
d. 升力和阻力,但不能控制空速。
-
大型喷气飞机的哪些飞行条件会产生最严重的飞行危险,因为它们产生最强的翼尖涡流?
a. 重载、低速、起落架和襟翼收起。
b. 重载、高速、起落架和襟翼放下。
c. 重载、低速、起落架和襟翼放下。
d. 重量、起落架和襟翼没有影响。
-
在大型飞机后方可能遇到的危险涡流湍流仅在该飞机处于以下状态时产生:
a. 使用高功率设置。
b. 在高空速下运行。
c. 产生升力时。
d. 在高空运行时。
-
大型飞机产生的翼尖涡流倾向于:
a. 从地面上升到起落航线高度。
b. 下沉到产生湍流的飞机下方。
c. 在起飞滑跑开始点积累并保持一段时间。
d. 当地面风强时非常缓慢地消散。
-
从后方观察,尾流湍流涡流如何围绕每个翼尖循环?
a. 向内、向上并绕过翼尖。
b. 逆时针方向。
c. 向外、向上并绕过翼尖。
d. 向外、向下并绕过翼尖。
-
关于大型运输机产生的尾流湍流,以下哪项陈述是正确的?
a. 螺旋桨驱动飞机后方的尾流湍流可以忽略不计,因为喷气发动机推力是涡流形成的必要因素。
b. 可以通过在产生涡流的飞机飞行路径后方和下方300英尺处飞行来避开涡流。
c. 任何给定飞机的涡流特性可能会因襟翼的伸展或速度的改变而改变。
d. 可以通过在产生涡流的飞机飞行路径的下风侧和下方飞行来避开涡流。
-
轻微的侧风对刚刚起飞的大型飞机产生的翼尖涡流有什么影响?
a. 下风侧涡流将比上风侧涡流在跑道上停留更长时间。
b. 侧风将迅速消散两个涡流的强度。
c. 侧风将使两个涡流都远离跑道。
d. 上风侧涡流将比下风侧涡流在跑道上停留更长时间。
-
在起飞过程中,为避开离场喷气式飞机的翼尖涡流,飞行员应该:
a. 保持在喷气式飞机飞行路径的下方。
b. 爬升到喷气式飞机飞行路径的上方并保持在上风侧。
c. 在远超过喷气式飞机飞行路径的点起飞。
d. 保持在喷气式飞机飞行路径的下方和下风侧。
-
什么风况会使着陆跑道上的尾流湍流危险持续最长时间?
a. 轻微的侧向逆风。
b. 轻微的侧向顺风。
c. 直接顺风。
d. 强烈的直接侧风。
-
如果你在一架重型喷气机刚刚着陆后起飞,你应该计划在哪里抬轮?
a. 在喷气机接地点之前。
b. 在喷气机接地点并在跑道的上风侧边缘。
c. 在喷气机接地点之前并在跑道的下风侧边缘。
d. 在喷气机接地点之后。
-
冰、雪或霜对飞机性能和飞行特性的不利影响包括升力减小和:
a. 推力增加。
b. 失速速度降低。
c. 失速速度增加。
d. 飞机总是在相同的指示空速下失速。
-
机翼上的升力最恰当的定义是:
a. 垂直于机翼弦线作用的差压。
b. 垂直于相对气流作用的力。
c. 由翼型上表面层流产生的减压,垂直于平均弯度线作用。
d. 与相对气流平行且方向相反的力。
-
关于改变攻角,以下哪项陈述是正确的?
a. 攻角减小将增加机翼下方的压力,并减小阻力。
b. 攻角增加将减小机翼下方的压力,并增加阻力。
c. 攻角增加将增加阻力。
d. 攻角增加将减小升力系数。
-
机翼的攻角直接控制:
a. 机翼的安装角。
b. 作用于机翼上的压力分布。
c. 机翼上下的气流量。
d. 气流中的动压。
-
理论上,如果攻角和其他因素保持不变,而空速加倍,则在较高速度下产生的升力将是:
a. 与较低速度时相同。
b. 比较低速度时大两倍。
c. 比较低速度时大四倍。
d. 为四分之一。
-
飞机机翼设计产生升力是由于:
a. 机翼表面下方的负气压和上方的真空。
b. 机翼表面下方的真空和上方较大的气压。
c. 机翼表面下方较高的气压和上方较低的气压。
d. 前缘比后缘更高的压力。
-
在机翼上,升力垂直于,而阻力平行于:
a. 弯度线。
b. 纵轴。
c. 弦线。
d. 飞行路径。
-
关于飞机在稳定水平飞行中的相对力,以下哪项陈述是正确的?
a. 推力大于阻力,而重量和升力相等。
b. 这些力是相等的。
c. 推力大于阻力,升力大于重量。
d. 推力略大于升力,但阻力和重量相等。
-
在较高海拔的机场,飞行员应该知道指示空速:
a. 将保持不变,但地速会更快。
b. 将更高,但地速将保持不变。
c. 应该增加以补偿更稀薄的空气。
d. 应该更高以获得更高的着陆速度。
-
飞机离开地面效应时将:
a. 经历地面摩擦减小,需要轻微减小功率。
b. 需要较低的攻角来维持相同的升力系数。
c. 经历诱导阻力减小,需要较小的攻角。
d. 经历诱导阻力增加,需要更多的推力。
-
如果在地面效应中和不在地面效应中保持相同的攻角,升力将:
a. 增加,诱导阻力将增加。
b. 增加,诱导阻力将减小。
c. 减小,诱导阻力将增加。
d. 减小,诱导阻力将减小。
-
关于稳定、非加速飞行中的升力,以下哪项是正确的?
a. 每个攻角都需要相应的指示空速来产生足够的升力以保持高度。
b. 翼型总是在相同的指示空速下失速;因此,重量增加将需要速度增加以产生足够的升力来保持高度。
c. 在较低的空速下,攻角必须更小以产生足够的升力来保持高度。
d. 升力必须恰好等于阻力。
-
在给定的指示空速下,空气密度增加对升力和阻力有什么影响?
a. 升力将增加但阻力将减小。
b. 升力和阻力将增加。
c. 升力和阻力将减小。
d. 升力和阻力将保持不变。
-
如果攻角增加超过临界攻角,机翼将不再产生足够的升力来支撑飞机重量:
a. 除非空速大于正常失速速度。
b. 无论空速或俯仰姿态如何。
c. 除非俯仰姿态在自然地平线上或以下。
d. 在这种情况下,应立即向后拉操纵杆。
-
已知:
飞机A.
翼展:51米
平均翼弦:4米飞机B.
翼展:48米
平均翼弦:3.5米确定正确的展弦比和机翼面积:
a. 飞机A的展弦比为13.7,机翼面积大于飞机B。
b. 飞机B的展弦比为13.7,机翼面积小于飞机A。
c. 飞机B的展弦比为12.75,机翼面积小于飞机A。
d. 飞机A的展弦比为12.75,机翼面积小于飞机B。
-
机翼的展弦比定义为:
a. 翼展与翼根的比率。
b. 弦长的平方与翼展的比率。
c. 翼展与平均弦长的比率。
d. 机翼面积的平方与翼展的比率。
-
在空速减小时,为保持高度必须对飞机控制做出什么改变?
a. 增加攻角以补偿减小的动压。
b. 保持恒定的攻角直到达到所需的空速,然后增加攻角。
c. 增加攻角以产生比重量更大的升力。
d. 减小攻角以补偿阻力的减小。
-
从低密度高度的机场起飞将导致:
a. 更长的起飞滑跑。
b. 起飞前有高于标准的IAS。
c. 相同起飞IAS下有更高的TAS。
d. 由于相同IAS所需的TAS更低,起飞滑跑更短。
答案
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| b | d | d | a | b | b | a | a | c | a | c | b |
| 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 | 21 | 22 | 23 | 24 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| c | c | d | b | b | d | c | b | c | b | c | c |
| 25 | 26 | 27 | 28 | 29 | 30 | 31 | 32 | 33 | 34 | 35 | 36 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| d | b | a | d | b | a | d | b | b | c | a | d |
相关文章:

《ATPL地面培训教材13:飞行原理》——第5章:升力
翻译:刘远贺;工具:Cursor & Claude 3.7;过程稿 第5章:升力 目录 空气动力系数基本升力方程回顾升力曲线升力曲线的解释速度-动压关系密度高度翼型剖面升力特性阻力特性简介升阻比飞机重量对最小飞行速度的影响表…...

STM32部分:2、环境搭建
飞书文档https://x509p6c8to.feishu.cn/wiki/DQsBw76bCiWaO4kS8TXcWDs0nAh Keil MDK用于编写代码,编译代码芯片支持包,用于支持某类芯片编程支持STM32CubeMX用于自动生成工程,减少手动重复工作 STM32F1系列芯片支持包 软件下载 直接下载&am…...

STL之list容器
list的介绍 1.list的底层是双向链表结构,双向链表中的每个元素在互不相关的独立结点中,在结点中通过指针指向前一个元素和后一个元素 2.list是可以在常数范围内在任意位置的插入和删除的序列式容器,并且该容器可以前后双向迭代 3.vector的…...

DNS 域名解析
DNS(Domain Name System) 是一个将域名转换为IP地址的系统。它的主要功能是使用户能够通过易于记忆的域名访问互联网资源,而不是记住复杂的IP地址。DNS类似于“互联网的电话簿”,帮助计算机找到彼此的位置。 一、DNS的基本概念 …...

我写了一个分析 Linux 平台打开文件描述符跨进程传递的工具
Linux 系统的设计中,继承了 Unix “一切皆文件” (Everything is a file) 的思想,系统中的众多对象,都可以表示为文件,可以对它们执行文件操作,如 read()、write()、mmap()、ioctl()、close() 和 poll() 等。Linux 系统…...
)
QML图像提供器 (Image Provider)
QML 中的图像提供器是一种自定义图像加载机制,允许你从非文件源(如数据库、网络或程序生成的内容)提供图像数据。 主要类型 QQuickImageProvider - 基础图像提供器 QPixmapImageProvider - 提供 QPixmap 图像 QImageImageProvider - 提供 …...

【Java学习】通配符?
面向对象系列八:泛型(二) 一、通配符? 二、泛型符<> 1.泛型类里 2.泛型类外 2.1使用过程中 2.2使用最后末 三、限制 1.泛型类里的限制 2.延申处的限制 2.1extend限制上界 2.1.1返回值接 2.1.2形参传 2.2super限制下界 2.2.1形参传 2.2.2返回值…...
)
安卓基础(悬浮窗和摄像)
ACTION_MANAGE_OVERLAY_PERMISSION 的作用就是 打开系统设置的「悬浮窗权限管理页面」 Intent intent new Intent(Settings.ACTION_MANAGE_OVERLAY_PERMISSION,Uri.parse("package:" getPackageName()) ); startActivity(intent); 直接跳转目标应用的权限…...

一种实波束前视扫描雷达目标二维定位方法——论文阅读
一种实波束前视扫描雷达目标二维定位方法 1. 专利的研究目标与实际问题意义2. 专利提出的新方法、模型与公式2.1 运动平台几何建模与回波信号构建2.1.1 距离历史建模2.1.2 回波信号模型2.2 距离向运动补偿技术2.2.1 匹配滤波与距离压缩2.3 加权最小二乘目标函数2.3.1 方位向信号…...
,源码可白嫖!)
基于springboot的金院银行厅预约系统的设计及实现(源码+lw+部署文档+讲解),源码可白嫖!
摘要 随着信息技术在管理上越来越深入而广泛的应用,信息管理系统的实施在技术上已逐步成熟。信息管理系统是一个不断发展的新型学科,任何一个单位要生存要发展,要高效率地把内部活动有机地组织起来,就必须建立与自身特点相适应的…...

AVFormatContext 再分析零
随着对于AVFormatContext 各个参数的学习,逐渐可以从 整体架构上 再认识一下 AVFormatContext 了。 还是从解封装的第一步开始。 int avformat_open_input(AVFormatContext **ps, const char *url, ff_const59 AVInputFormat *fmt, AVDictionary **options); 实际上…...
和抱抱脸(Hugging Face)下载模型小细节)
【学习心得】魔塔(ModelScope)和抱抱脸(Hugging Face)下载模型小细节
介绍常用的两种在模型社区如魔塔(ModelScope)和抱抱脸(Hugging Face),下载预训练模型的方法,然后说明各种方法里面的小细节。 一、SDK下载 对于希望直接通过编程方式集成模型下载功能到自己的项目中的开发…...

嵌入式硬件篇---STM32 系列单片机型号命名规则
文章目录 前言一、STM32 型号命名规则二、具体型号解析1. STM32F103C8T6F103:C:8:T6:典型应用2. STM32F103RCT6F103:R:C:T6:典型应用三、命名规则扩展1. 引脚数与封装代码2. Flash 容量代码3. 温度范围代码四、快速识别技巧性能定位:F1/F4后缀差异硬件设计参考:引脚数…...

关于算法设计与分析——拆分表交换问题
题目: 用蛮力法设计一个算法,将A{a1, a2, ..., an}拆成B和C两个表,使A中值大于等于0的元素存入表B,值小于0的元素存入表C,要求表B和C不另外设置存储空间而利用表A的空间。 1)问题分析 题目要求设计一个算…...
)
在pycharm profession 2020.3上离线安装.whl类型的包(以PySimpleGUI为例)
今天写个小代码,用到了PySimpleGUI。 在pycharm profession 2020.3的项目中的Terminal里运行如下代码即可安装。 python3 -m pip install --force-reinstall --extra-index-url https://PySimpleGUI.net/install PySimpleGUI 安装方法如图: 安装后使用…...

c++回调函数
函数指针 //函数 bool lengthCompare(const string&, const string&); //pf为指针,指向一个函数,函数的类型为:bool (const string&, const string&) bool (*pf)(const string&, const string&); //函数࿰…...

mysql主从复制搭建,并基于Keepalived + VIP实现高可用
以下是基于 Keepalived VIP 实现 MySQL 主从复制高可用的详细步骤,涵盖主从复制搭建与故障自动切换: 一、MySQL 主从复制搭建(基础步骤回顾) 1. 主库(Master)配置 修改配置文件 /etc/my.cnf&…...
的失配误差校正处理(以4片1GSPS采样率的12bitADC交织为例讲解))
时间交织(TIADC)的失配误差校正处理(以4片1GSPS采样率的12bitADC交织为例讲解)
待写…有空再写,有需要的留言。 存在失配误差的4GSPS交织 校正完成后的4GSPS交织...

K8S自动弹性伸缩机制详解
Kubernetes (K8S) 自动弹性伸缩机制详解 Kubernetes 通过多种控制器和指标系统实现 自动弹性伸缩,主要包括 Pod水平伸缩(HPA)、垂直伸缩(VPA)、集群节点伸缩(CA) 三种方式。以下是核心机制和实…...

C++模版结构体的使用
1. convert_pointer 结构体模板 template<typename _SourceIterator, typename _DestT> struct convert_pointer {typedef typename convert_pointer<typename _SourceIterator::pointer, _DestT>::type type; };作用 这是一个递归模板,用于处理 _Sou…...

WebRTC 服务器之Janus架构分析
1. Webrtc三种类型通信架构 1.1 1 对 1 通信 1 对 1 通信模型设计的主要⽬标是尽量让两个终端进⾏直联,这样即可以节省服务器的资源,⼜可以提⾼ ⾳视频的服务质量。WebRTC ⾸先尝试两个终端之间是否可以通过 P2P 直接进⾏通信,如果⽆法直接…...

音视频开发成长之路与音视频知识总结
音视频开发曾经是一个富有挑战性和技术深度的领域。我来分享整理音视频开发的成长路径和知识体系: 音视频开发成长路线图 1. 基础阶段(1-3个月) 计算机基础:C/C、数据结构、操作系统音视频基础概念:采样率、比特率、…...

batch normalization和layer normalization区别
Normalization无非就是这样一个操作: 其中x是输入数据,维度为(B,T,C),其中B是batchsize,T是序列长度,C是embedding维度;括号内是标准化操作,γ和…...
源码深度剖析(14))
Android Compose 层叠布局(ZStack、Surface)源码深度剖析(14)
Android Compose 层叠布局(ZStack、Surface)源码深度剖析 一、引言 在 Android 应用开发领域,用户界面(UI)的设计与实现一直是至关重要的环节。随着技术的不断演进,Android Compose 作为一种全新的声明式…...

数据仓库方法论书籍及其阅读建议
A、关于数据仓库方法论的各书籍详细分析及汇总 1. 《Building the Data Warehouse (Third Edition)》 by W.H. Inmon 核心观点 企业级数据仓库(EDW):自上而下的架构,采用第三范式(3NF)模型&…...

数据库 1.0
数据库就是放数据的地方 程序里面的数据就是暂时性的 要是想把数据永久性的储存 MySQL是典型的C / S架构 Client 云端 Sever 服务端 数据库服务的开启和关闭 可以在这里选择关闭开启,关闭之后就无法通过终端再连接mysql了 通过命令行的方式开启和关闭mysql&…...

给QCustomPlot添加一个QScrollBar滚动条、限制缩放范围、自动设置大小和右边栏垂直缩放
实现效果 实现思路 从QCustomPlot类派生一个类,进行个性化设置,在轴矩形的上边设置Margin,放一个滚动条,设置滚动条的样式 常量定义 #define NQSCRB 1000构造函数初始化 // 设置QScrollBar的样式// 顶部空--5,左侧空--6...

计算机系统结构 第二章 :缓存优化
零-1:复习cache的基础知识: 一、映像方式 直接映射 原理:主存被分成若干区,每个区大小与 Cache 相同,区内再分块,主存每个区中块的大小和 Cache 中块大小相等,且每个区包含的块数也与 Cache 中块数相等。主存中任意…...

软件工程实践
例一 用例文档 UC1注册 执行者 潜在会员 前置条件 潜在会员访问系统 后置条件 系统已记录注册信息 涉众利益 潜在会员——希望注册尽量简单,希望自己的信息不会泄露 商店——希望获得尽可能多的未来客户信息,特别是联系方法 基本路径 1.潜在会员请求注册…...

将Airtable导入NocoDB
将Airtable导入NocoDB 0. 前提条件1. 详细步骤 NocoDB提供了一种简化流程,可在几分钟内将您的Airtable数据库无缝转移到各种数据库管理系统,包括MySQL、Postgres和SQLite。此功能特别适合希望将Airtable数据库迁移到更强大且可扩展的数据库管理系统中的用…...

【云备份】服务端数据管理模块设计与实现
目录 一、要管理的数据 二、如何管理数据 三.数据管理类的设计 3.1.数据信息结构体的设计 3.2.数据管理类的设计 四.数据管理类实现 4.1.数据信息结构体的数据填充 4.2.数据管理类的实现 五. 源代码测试 数据管理模块:需要管理的数据有哪些,而…...

Qt开发:按钮类的介绍和使用
文章目录 一、命令按钮类 (QPushButton)1.1 基本功能介绍1.2 常用构造函数1.3 常用方法1.4 信号与槽使用示例1.5 开关按钮(Checkable)1.6 创建出菜单按钮(Menu Button) 二、工具按钮类 (QToolBu…...

Clickhouse基于breakpad生成minidump文件,方便问题定位
背景 breakpad能够在程序崩溃的时候自动生成一个mini的core文件,能够帮助进行问题定位,但是clickhouse对于集成breappad的难度较大 查看github发现之前有大佬基于以前的分支有个MR,但是一直没有合并到社区,想来是有什么其他的原因…...

华为云Astro轻应用自定义连接器对接OBS云对象存储操作指南
操作难点图例(详细见下文详细操作步骤) 操作成功图例 说明:以下是通过自定义连接器创建新的OBS桶的图例 说明:以下是通过自定义连接器将数据内容嵌入创建新的OBS桶的图例 操作难点图例 说明:连接器编排需要注意的是动作选择、输入参数的设置等...

C# 运算符重载深度解析:从基础到高阶实践
运算符重载是 C# 中一项强大的特性,它允许开发者为用户自定义类型定义运算符的行为,使得代码更直观、更符合领域逻辑。本文将通过理论解析与实战示例,全面讲解运算符重载的实现规则、适用场景及注意事项。 一、运算符重载的核心概念 1. 什么…...

面试现场“震”情百态:HashMap扩容记
(以下为符合要求的文章内容) 【场景】 2024年秋招季某互联网大厂会议室 面试官:张工(P8级架构师) 求职者:马小帅(双非二本应届生) 第一轮提问(Java基础篇) …...

SCAU18124--N皇后问题
18124 N皇后问题 时间限制:5000MS 代码长度限制:10KB 提交次数:0 通过次数:0 题型: 编程题 语言: G;GCC;VC Description 有N*N的国际象棋棋盘,要求在上面放N个皇后,要求任意两个皇后不会互杀,有多少种不同的放法? 输入格式 …...

MySQL 分库分表
对于使用 MySQL 作为数据库管理系统的应用来说,当数据量达到一定规模时,单库单表的架构会面临性能瓶颈,如查询缓慢、写入性能下降等问题。为了解决这些问题,可以使用分库分表技术。 二、为什么需要分库分表 2.1 单库单表的局限性…...

滑动窗口leetcode 904
代码: class Solution { public:int totalFruit(vector<int>& fruits) {int n fruits.size();unordered_map<int,int> window_type_count;int left 0;int ans 0;for(int right 0; right <n;right){while(window_type_count.size() 2 &&…...

用Maven定位和解决依赖冲突
用Maven定位和解决依赖冲突 一、依赖冲突的常见表现二、定位冲突依赖的4种方法2.1 使用Maven命令分析依赖树2.2 使用IDE可视化工具2.3 使用Maven Enforcer插件2.4 运行时分析 三、解决依赖冲突的5种方案3.1 排除特定传递依赖3.2 统一指定版本(推荐)3.3 使…...

八大排序之选择排序
本篇文章将带你详细了解八大基本排序中的选择排序 目录 (一)选择排序的时间复杂度和空间复杂度及稳定性分析 (二)代码实现 (三)输出结果 选择排序的基本原理是:每次从待排序的数组中找出最大值和最小值。具体流程是…...

SVM实战:从理论到鸢尾花数据集的分类可视化
SVM实战:从理论到鸢尾花数据集的分类可视化 在机器学习的广阔领域中,支持向量机(Support Vector Machine,SVM)作为一种经典且强大的分类算法,备受瞩目。它凭借独特的思想和卓越的性能,在模式识…...

深入解析 Stacking:集成学习的“超级英雄联盟
在机器学习的世界里,我们常常面临一个挑战:单一模型往往难以完美地解决复杂问题。就像漫威电影中的超级英雄们一样,每个模型都有自己的独特能力,但也有局限性。那么,如何让这些模型“联手”发挥更大的力量呢࿱…...

C# 编程核心:控制流与方法调用详解
在编程中,控制流和方法调用是构建程序逻辑的两大基石。它们决定了代码的执行顺序和模块化协作方式。本文将从基础概念出发,结合代码示例,深入解析这两部分内容。 控制流:程序执行的指挥棒 控制流决定了代码的执行路径࿰…...

PyTorch_张量基本运算
基本运算中,包括add, sub, mul, div, neg等函数,以及这些函数的带下划线的版本add_, sub_, mul_, div_, neg_, 其中带下划线的版本为修改原数据。 代码 import torch import numpy as np # 不修改原数据的计算 def test01():data torch.randint(0, 10…...

C++负载均衡远程调用学习之订阅功能与发布功能
目录 1.lars-DnsV0.1回顾 2.Lars-DnsV0.2-订阅功能的订阅模块分析 3.Lars-DnsV0.2-订阅模块的类的单例创建及方法属性初始化 4.Lars-DnsV0.2-发布功能的实现 5.Lars-DnsV0.2-发布功能的总结 6.Lars-DnsV0.2-订阅流程复习 7.Lars-DnsV0.2-订阅模块的集成 8.Lars-DnsV0.2订…...
)
接口测试的核心思维(基础篇)
1.为什么会进行接口测试? 早期发现问题,降低修复成本 当我们服务端已经完成,而前端还未进行开发的时候。我们可以通过接口测试避免前端的交互直接进行服务端的测试。 接口测试也能够更早介入项目的测试,降低修复成本。 提高测试…...

给文件内容加行号
题目: 给定一个文件,通过文件读写,给文件内容加行号。 行号形式如: 1:) xxXXXX 2:) xxxxXX 要求: 使用缓冲流操作。 思路分析: 程序定义了两个字符串变量 inputFile 和 outputFile,分别存储输入文件的路径…...

【计算机视觉】三维重建: MVSNet:基于深度学习的多视图立体视觉重建框架
MVSNet:基于深度学习的多视图立体视觉重建框架 技术架构与核心算法1. 算法流程2. 关键创新 环境配置与实战指南硬件要求安装步骤数据准备(DTU数据集) 实战流程1. 模型训练2. 深度图推断3. 点云生成 常见问题与解决方案1. CUDA内存不足2. 特征…...

终端与环境变量
一、我的电脑是Win10的,首先打开终端如下: 此时终端来到C:\Users\lenovo的目录下,可以访问该目录下的所有文件(夹)。另外,除了这个之外,终端还可以访问环境变量中的所有文件(夹&…...