视觉“解锁”触觉操控:Franka机器人如何玩转刚柔物体?
集智联机器人(Plug & Play Robotics),简称PNP机器人,是Franka Robotics和思灵机器人金牌合作伙伴,集智联机器人团队成员均来自于国内外机器人行业知名企业,具有较强的学术背景。PNP机器人致力于为客户提供从硬件到软件的全方位支持,帮助客户快速实现机器人的部署与应用,提升生产效率和智能化水平。 PNP机器人和思灵机器人以及旗下Franka机器人等深度合作,聚焦面向生活和工业场景的单臂/双臂数据采集场景,致力于机器人即插即用(Plug & Play )技术和具身智能通用解决方案。
通过PNP机器人平台,您可以轻松购买各种机器人相关产品,省心省事省力。我们专注于为用户提供专业、便捷且经济实惠的机器人系统及定制服务,帮助您实现更多可能-www.pnprobotics.com

原文链接:https://arxiv.org/html/2403.16764v1
摘要
触觉反馈对于人类成功执行复杂而精细的操作任务至关重要。最近触觉传感器的兴起使机器人能够利用触觉并大幅扩展其能力。然而,许多任务仍然需要人工干预/指导。为此,我们提出了一个远程操作框架,旨在根据安装在Franka机器人夹持器上的基于摄像头的触觉传感器的数据为人类操作员提供触觉反馈。引入部分自主性以防止在执行任务期间抓取的物体滑落。值得注意的是,我们完全依靠低成本的现成硬件来实现经济实惠的解决方案。我们在真实硬件上使用三个不同的操作员,展示了该框架在九种不同物体上的多功能性,从刚性物体到柔软易碎物体。
一、介绍
触觉传感器旨在复制机器的触觉,使机器人能够收集与其接触的物体的物理特性信息,包括纹理、形状和柔软度。这种触觉能力在对易碎物体进行精确而精细的操作时尤其重要,例如处理食品或易碎材料。在各种触觉传感器技术中[1],基于摄像头的触觉传感器由于其高分辨率、稳健性、电路简单和低成本,最近引起了研究界的广泛兴趣 [2]与电子传感器相比,这种传感器更先进。这种传感器通常由可变形弹性体组成,并在其后方集成一个摄像头,用于捕捉接触过程中发生的变形的高分辨率图像。举几个应用例子,手部操作[3]、体积网格重建[4],以及对软脆物体的操作[5]已在文献中使用配备基于视觉的触觉传感器的自主机器人实现。然而,在许多现实世界的应用中,人类指导仍然是必不可少的,以确保成功的结果。这种必要性出现在从意外故障中恢复、在高度非结构化的环境中操作或记录示例操作等场景中。
受上述观察的启发,我们的研究深入研究了远程操作场景,旨在将人类指导技能与安装在机器人末端执行器上的基于视觉的触觉传感器收集的触觉信息相结合。更具体地说,我们提出了一种新颖的触觉到触觉 (T2H) 算法,我们将观察到的触觉信息转换为用户远程操作控制器上接收到的振动。尽管触觉反馈已在文献中得到广泛应用,例如参见[6,7,8],据我们所知,目前还没有现成的解决方案可以将基于摄像头的触觉传感器数据带入价格合理的消费级硬件中,用于远程操作机器人机器人。我们的框架旨在满足这一需求,通过提供一种易于部署的方式来远程操作配备夹持器和两个 DIGIT 触觉传感器的 Franka 机器人[9],使用 Oculus Quest 2 控制器。夹持器。机器人末端执行器模仿手持控制器的 6D 速度,而触发按钮用于关闭和打开夹持器。触觉感知被转换成控制器感知到的振动幅度,让用户直观地感受到物体是否被抓取以及抓取的力度。此外,我们为框架配备了部分自主行为,一旦机器人抓住物体,就会自动检测并防止滑落。
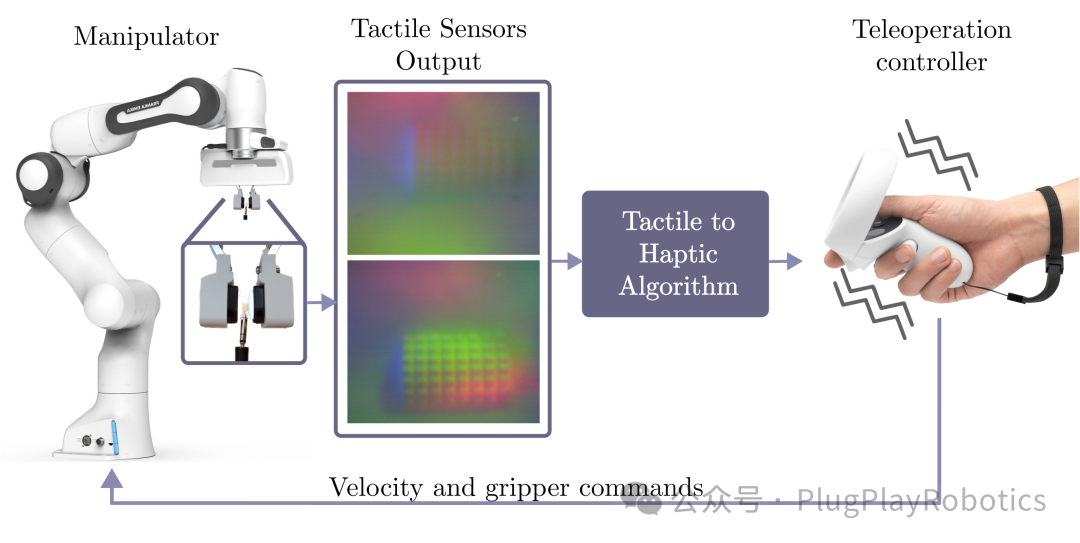
图 1:所提出的 T2H 远程操作框架概述:利用基于摄像头的触觉传感器获得的数据通过 T2H 算法进行处理,通过远程操作控制器向操作员提供由此产生的触觉反馈,并生成机器人的命令。
具体来说,我们的贡献是:
-
一种新颖的 T2H 远程操作框架,可部署在低成本硬件上,将触觉传感器读数转换为触觉振动反馈,同时提供部分自主性以防止滑落。
-
三位不同的操作员对这种具有和不具有部分自主性的触觉反馈在刚性和柔性物体操纵中的应用进行了多种演示。
-
为了可重复性目的,公开提供源代码1和详细设置说明2。
二、相关工作
远程机器人控制,通常称为遥操作,是一个活跃的研究领域,有各种方法可以最有效、最准确地实现这一目标 。10]。谢等人讨论了使用操纵杆作为控制界面 [11]。石黑一雄等人深入研究了外骨骼的应用[12],而 Gliesche 的作品将键盘和鼠标与动觉设备进行了比较 [十三]。Nandikolla 等人表示,控制机器人的另一种方法是通过脑机接口 (BCI),利用用户的脑信号指挥机器人,让他们以创新的方式与机器人互动 。[14]。虽然这些方法提供了先进的远程操作,但需要注意的是,它们通常需要昂贵的设备,并且需要专业知识和培训。此外,它们中的大多数都是针对特定机器人平台量身定制的。
另一方面,虚拟、增强和混合 (VAM) 技术提供了先进的沉浸式应用程序,可用于通过位置或速度控制器来操纵机器人,并且可以轻松适应不同的机器人平台 。15,16,17,18]。此外,VAM 框架已被引入,通过可视化机器人在交付任务中的状态和意图来促进人机协作 [19,20] .场景 [21]。
然而,据我们所知,这些 VAM 框架均未专注于使用触觉反馈来操纵柔软易碎的物体。我们的方法使用 VAM 框架控制器为用户提供通过触觉传感器记录的触觉。这种传感功能硬件成本低,同时提高了用户操纵的便利性,尤其是在处理易碎物体时。
人机交互中的触觉反馈
触觉反馈在实现机器人操控的精确度方面起着重要作用。它包含各种反馈选项和控制器,有助于提高用户对机器人状态和运动的理解。各种反馈都被归类为触觉。振动触觉反馈是一种振动,可以提供有关机器人是否离障碍物更近或更远的感官信息 。22,23]而挤压弹力带可以模拟抓握物体的感觉 [24]。六个自由度控制器施加阻力来引导机器人的运动,例如,当机器人偏离预定路径时进行干预 [二十五,二十六]。然而,这些解决方案高度专业化且成本高昂。此外,将引导力作为触觉反馈有时会导致用户和机器人之间产生混淆和冲突,而寻找平衡是一个活跃的研究领域 [二十七]。此外,触觉设备还包括配备阻力板的手套,以模拟握住物体的感觉 [二十八],腕戴式触觉设备,为虚拟和增强现实体验提供无控制器触觉反馈 [二十九],以及用于模拟与虚拟物体交互的设备,触觉反馈集中在手腕上 [三十,31]。
虽然这些应用专注于触觉反馈以提高精确操作,但很少有关于使用视觉传感器的研究(例如 DIGIT [9]、Minsight [三十二]或 GelSight [33] ) 作为触觉反馈的驱动器。Cao 等人 [三十四]使用机械臂中的视觉传感器来评估材料特性、表面特性、粗糙度和摩擦力,并将其转换到反映该材料特性的触觉屏幕。
在我们的论文中,我们采用了不同的方法。首先,我们的解决方案使用 VAM 控制器和视觉传感器,这些控制器和传感器是市售的、价格合理的,并且不是机器人专用的。接下来,我们使用这些视觉传感器将触觉反馈与机械臂抓取的物体上施加的力的大小相关联。这有助于操作员了解对物体施加了多大的力,防止不必要的物体压缩而导致物体损坏,同时也防止在施加的力不足时 滑落。
三、问题陈述和方法概述
本研究的主要目标是开发一个遥操作框架,利用现成的、经济高效的硬件来操纵可能很精密的物体。具体来说,该框架应实现以下目标:i)经济高效的遥操作,即实现基于低成本和商用硬件组件的系统,提高其可承受性;ii)精密物体操纵,即能够精确、轻柔地操纵易碎物体;iii)用户友好界面,即为用户设计直观的界面,确保易用性,并降低不同专业水平操作员的学习曲线;iv)实时控制,即提供无延迟的控制和反馈机制。
为了实现上述目标,我们提出了图1所示的 T2H 框架 。具体来说,我们考虑在夹持器上配备现成的基于视觉的触觉传感器的机器人机器人,以及能够向用户提供振动反馈的控制器。在我们的设置中,我们采用以下商用和低成本设备:DIGIT 触觉传感器[9]用于机器人,Oculus Quest 2 控制器用于远程操作。触觉传感器数据基于低计算图像处理转换为振动反馈,使用户能够感知到对操作物体施加的压力感。同时,控制器的线速度和角速度转换为机器人末端执行器的速度命令,为用户提供反应灵敏、直观的界面。此外,我们设计了一种部分自主行为,以主动防止操作过程中物体滑落。在实践中,这需要在检测到自主滑落时自动收紧抓握,确保牢固握住物体。触觉反馈和自主行为之间的协同作用使用户能够轻松操纵精密物体(如第五节所示 ),从而降低了这些物体
四、T2H 框架
所提出的 T2H 框架包括以下关键模块,这些模块将在本节的其余部分详细介绍:i)从触觉传感器到遥控操作控制器的映射, ii)从遥控操作控制器到机器人命令的映射,以及iii) 用于防止滑落的部分自主性。
图2显示了通信架构以及信息流, 该架构完全集成在 ROS 中间件中。我们利用 Unity Robotics 工具箱3 来实现 Unity 和 ROS 之间的通信。具体来说,它允许我们创建一个部署在 Oculus 耳机上的自定义 Unity 应用程序,并能够向 ROS 发送/接收信息。通过这种方式,可以向遥控控制器提供触觉反馈,同时还允许将控制器的命令转发给机器人。在所提出的框架中,操作员可以直接查看操作环境,无需佩戴耳机。但是,计划在未来的工作中开发一个额外的图形用户界面 (GUI) 来进一步增强人类感知。
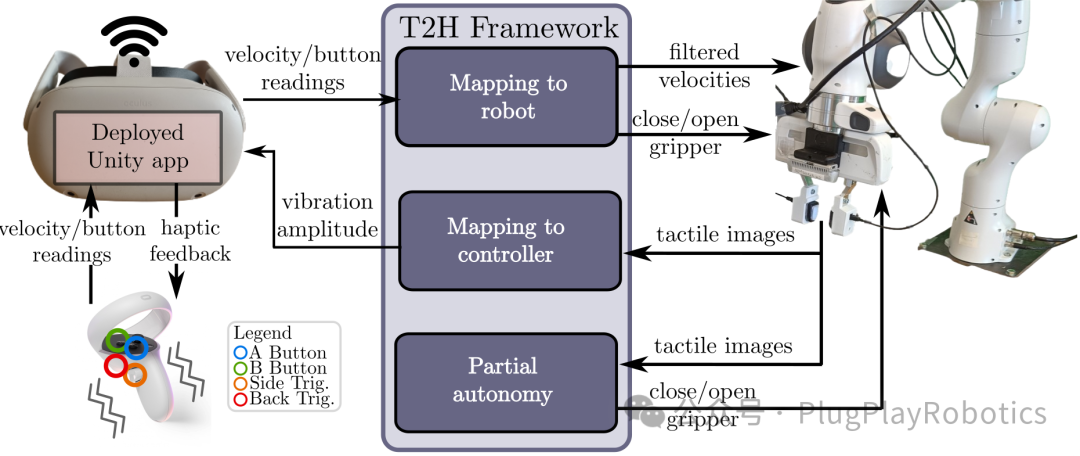
图 2:T2H 远程操作框架的通信架构。
从触觉传感器到触觉反馈的映射
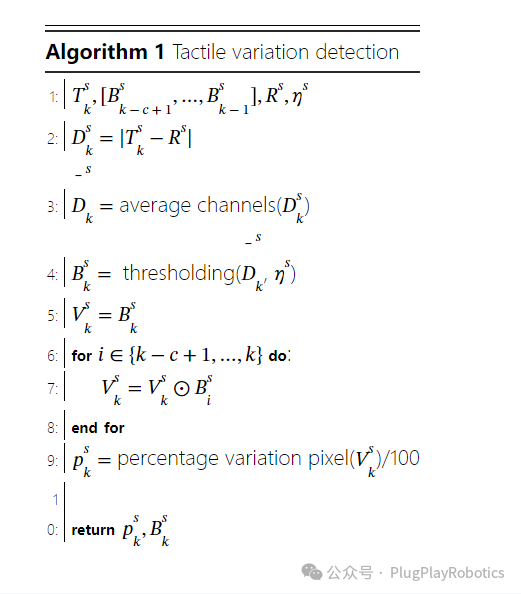
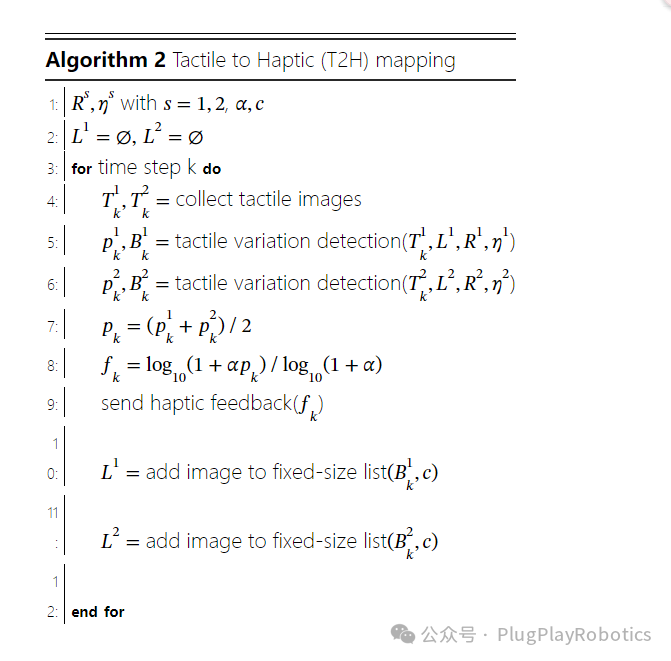
为了根据触觉传感器的图像确定触觉反馈,我们扩展了之前工作中介绍的处理方法。5]。基本思想是计算每个传感器图像相对于背景参考图像的像素变化,背景参考图像可由操作员随时设置,然后将振动反馈与改变的像素数相关联。一般来说,随着抓握力的增强,与背景图像不同的像素比例也会增加,从而产生放大的触觉反馈,并应将其传达给操作员。
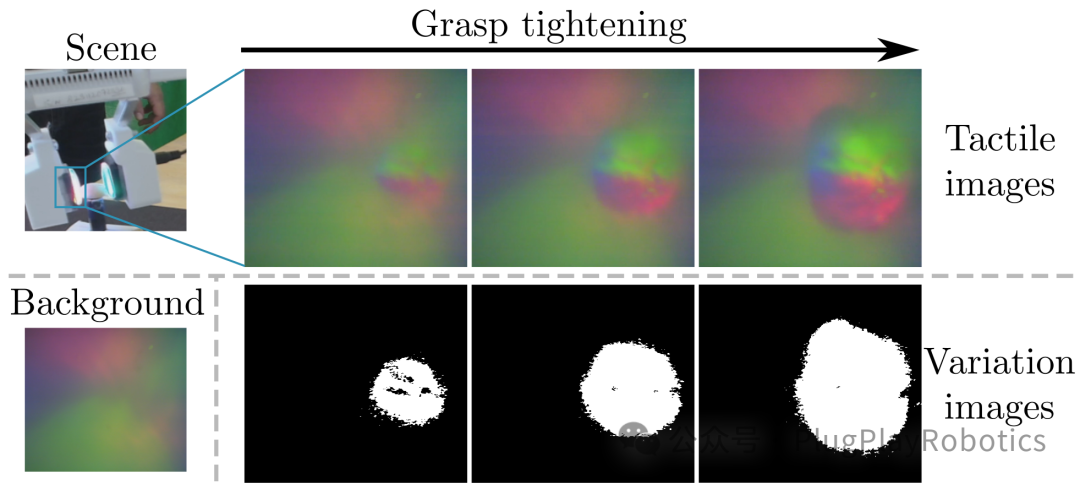
图 3:抓紧开心果时触觉图像(第一行)与相应变化图像(第二行)的表示。场景和背景显示在左侧。
从遥控控制器到机器人的映射
从遥控控制器到机器人的映射模块的目的是用机器人复制操作员执行的动作。只要A按钮保持按下状态,命令的转换就会持续,也就是说,如果按钮没有按下,机器人就会收到零速度命令。按下按钮A时,遥控控制器的线性和旋转速度都会映射到机械手低级笛卡尔控制器的输入中。
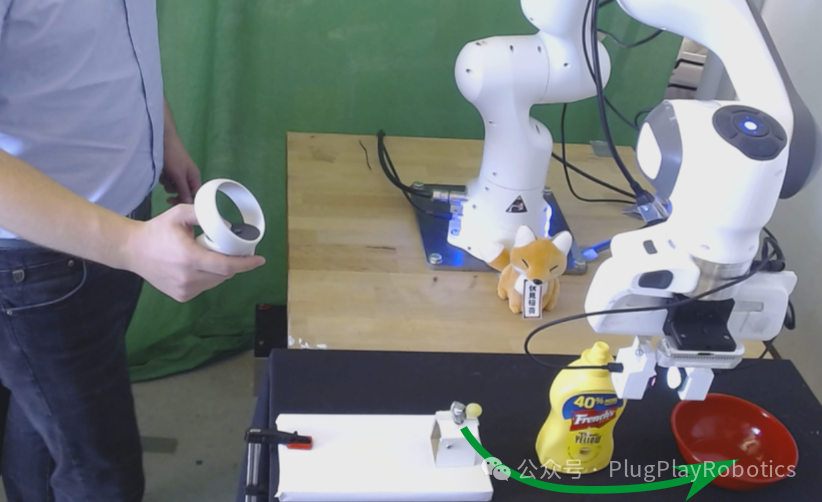
图6:T2H 框架验证的实验设置。所需运动以绿色箭头突出显示。
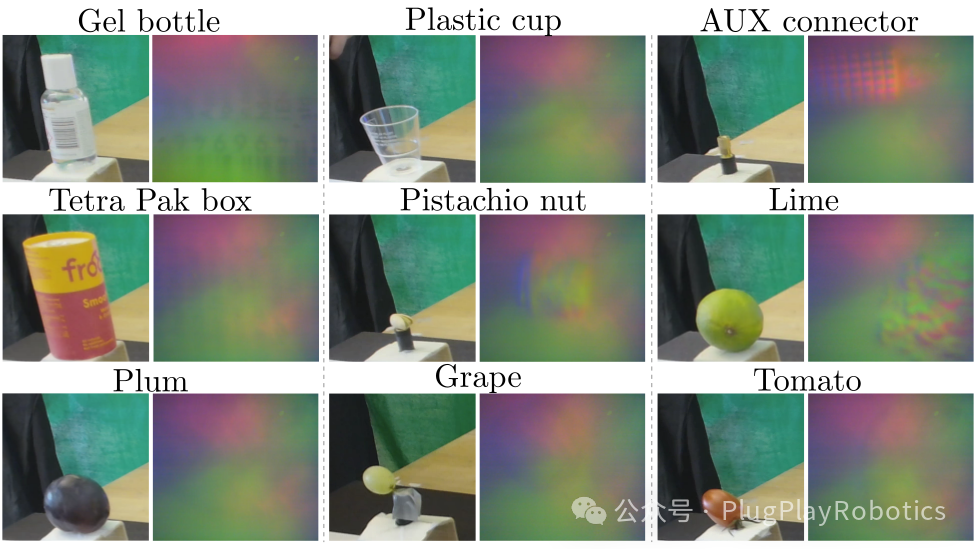
图 7:一组物体以及相应的触觉数据。
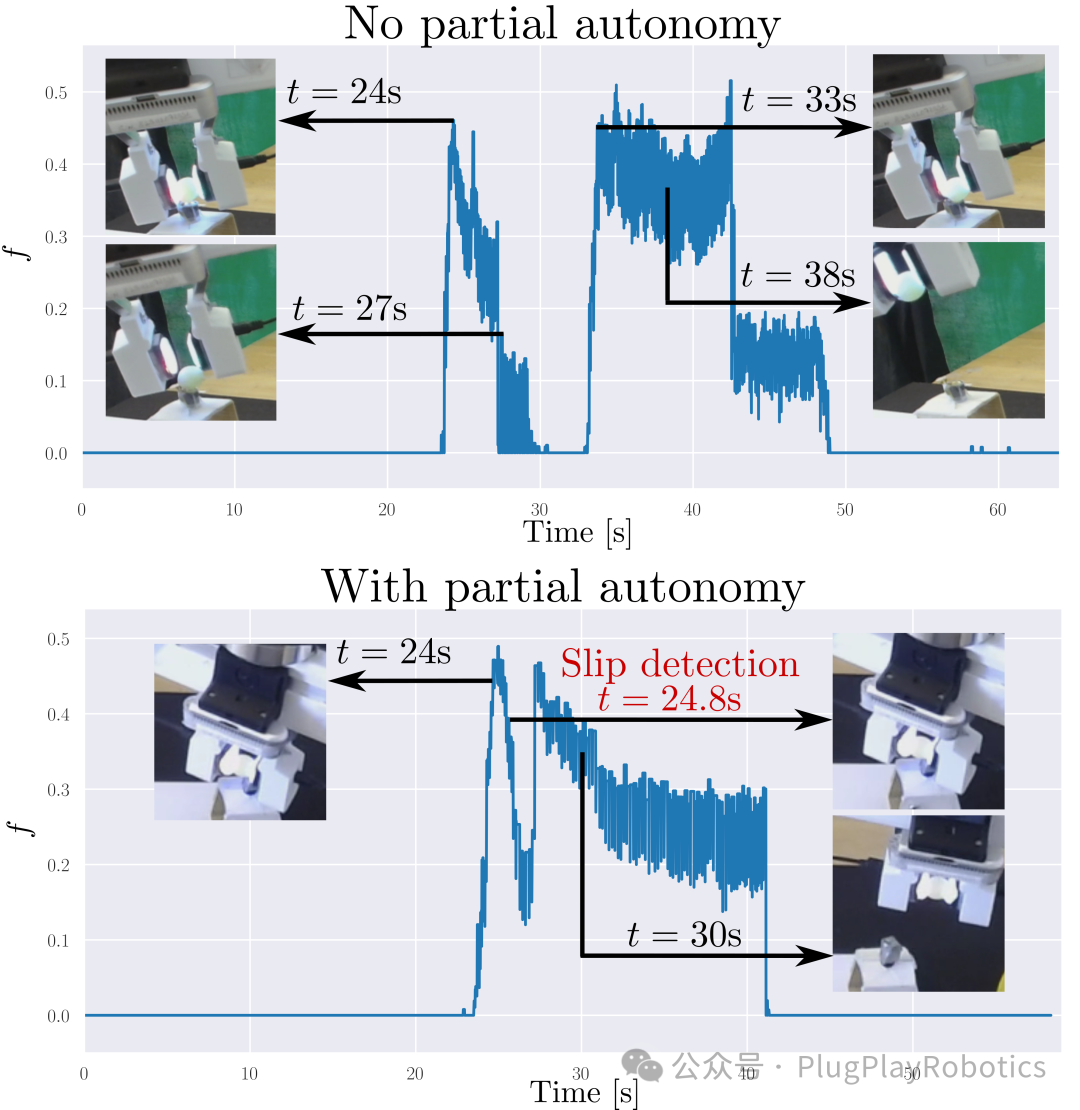
图 8:专家用户在操作葡萄时获得的触觉反馈,在未启用部分自主权(顶部)和启用部分自主权(底部)的情况下。
六 结论
在本研究中,我们提出了新颖的 T2H 框架,该框架基于基于视觉的触觉传感器为远程操作提供触觉反馈。我们使用低成本的消费级硬件实现了 T2H,并公开了源代码。该框架利用触觉图像与背景参考图像相比的像素变化来提供振动反馈,增强操作员在对象操作过程中的感知和控制。此外,部分自主功能旨在防止操作任务期间打滑。该系统的有效性已在具有各种物理特性的一系列物体(包括易碎物品)上得到证实,且不会造成损坏。在不同经验水平的操作员之间确认了可用性。未来的工作旨在通过预测人类意图引入主动行为,将 GUI 与耳机集成,并开展涉及多名操作员的广泛用户研究。
相关文章:

视觉“解锁”触觉操控:Franka机器人如何玩转刚柔物体?
集智联机器人(Plug & Play Robotics),简称PNP机器人,是Franka Robotics和思灵机器人金牌合作伙伴,集智联机器人团队成员均来自于国内外机器人行业知名企业,具有较强的学术背景。PNP机器人致力于为客户提…...

FlinkUpsertKafka深度解析
1. 设计目标与工作机制 Upsert-Kafka Connector 核心功能:支持以 Upsert(插入/更新/删除) 模式读写 Kafka 数据,适用于需要动态更新结果的场景(如聚合统计、CDC 数据同步)。数据流类型: 作为 …...

百度Create大会深度解读:AI Agent与多模态模型如何重塑未来?
目录 百度Create大会亮点全解析:从数字人到Agent生态布局 数字人商业化:从"拟人"到"高说服力"的进化 Agent生态:从"心响"App看百度的Agent战略布局 "心响"App的技术架构与创新点 多模态大模型&a…...

新能源汽车运动控制器核心芯片选型与优化:MCU、DCDC与CANFD协同设计
摘要:随着新能源汽车产业的迅猛发展,汽车运动控制器的性能和可靠性面临着更高的要求。本文深入探讨了新能源汽车运动控制器中MCU(微控制单元)、DCDC电源管理芯片和CANFD总线通信芯片的选型要点、优化策略及其协同设计方案。通过综…...

【软件工程】 白盒测试简介
1. 前言 在软件测试过程中,白盒测试(White-box Testing)是一种重要方法,它通过检查程序内部结构来验证软件功能。本文以一道典型的伪代码程序为例,结合白盒测试的基本操作,设计语句覆盖测试用例࿰…...

uniapp自定义一个选择年月日时分的组件。
<template><view><u-popup :show"timePopShow" mode"bottom" close"close" open"open" :closeOnClickOverlay"true"><view class"popup-container"><!-- 自定义时间内容 --><vi…...
)
Git命令(Gitee)
三板斧: git init //初始化本地仓库 git add . //添加所有文件到缓存区 (或指定文件) git commit -m "备注" //提交,填写备注 git remote add origin <远程仓库链接> git push -u origin ma…...

Node.js 应用部署:镜像体积优化与安全的多阶段构建探索
Node.js 应用部署:镜像体积优化与安全的多阶段构建探索 在开发 Node.js 应用时,部署过程中的镜像体积优化和安全性保障是至关重要的环节。本文将通过两种不同的 Docker 部署方式,深入探讨如何实现高效的镜像体积优化和安全的部署环境。 传统的单阶段构建方式 许多开发者在…...

深度解析:Web Crawling与Web Scraping的区别与联系
在现代互联网数据驱动的时代,Web Crawling(网页爬取)和Web Scraping(网页抓取)成为数据采集领域的两大核心技术。尽管两者常被混用,但它们在技术实现、应用目的和操作流程上存在显著差异。本文将基于权威资料,特别是维基百科的定义࿰…...

C# 利用log4net 工作台打印和保存到文件
目录 log4net简介引言1、添加引用库2、添加引用和构建实例3、添加属性配置4、添加配置文件最后 log4net简介 log4net是一个开源的日志记录组件,专为.NET平台设计。它是Apache log4j框架在Microsoft .NET平台的实现,属于Apache Logging Servic…...

2025 VSCode中如何进行dotnet开发环境配置完整教程
我一直都是用Visual Studio 2019来开发C#项目的,用的比较顺手,也习惯了。看其他技术文章有介绍VS Code更轻量,更方便。 所以就想来研究如何使用VS Code,看看它是如何构建代码、调试代码、如何运行C#应用程序。 本文将详细介绍如何…...

vscode本地化显示远程图形化界面
远程登陆到服务器端 sudo vim /etc/ssh/sshd_config修改文件中的参数,保存。主要参数如下 配置好上述后需要reload一下ssh,安装xclock。 service ssh reload # 安装x11-apps,这样就可以使用xclock apt install x11-apps查看环境变量,在其中并没有DISPL…...

STM32 CAN通信 HAL库实战教程:从零到测试成功
STM32 CAN通信 HAL库实战教程:从零到测试成功 <我打印的是陀螺仪的数据> 目录 简介:为什么学习CAN通信CAN通信基础概念STM32 CAN硬件配置CAN初始化详解CAN数据发送实现CAN数据接收实现测试与验证方法常见问题与解决总结与拓展 1. 简介࿱…...

数据结构强化篇
应用题 排序 插入排序 void InsertSort (ElemType A[], n int) {int i, j;for (i2; i<n; i) //依次将 A[2]~A[n]插入前面已排序序列if (A[i]<A[i-1]) { //若 A[i]关键码小于其前驱,将 A[i]插入有序表A[0]A[i]; //复制为哨兵,A[0]不存放…...

泰迪杯实战案例超深度解析:旅游景点游客流量预测与资源优化
(2025年泰迪杯数据挖掘挑战赛D题特等奖案例) 一、案例背景与目标 1.1 应用场景与痛点 某5A级景区面临以下核心问题: 拥堵严重:节假日热门景点游客密度超过10人/㎡,排队时间长达2小时。 资源浪费:接驳车空载率30%,餐饮点位在非高峰时段闲置率60%。 应急滞后:突发降雨或…...

qt 3d航迹图
一般就是三种方法 1.opengl,vtk这种从零自己画,网上也可能有半成品,大多是付费的。 2.重写qwt3d,07年就停止更新了,画出来类似opengl,需要自己修改参数,参数修改不对很难搞,对于经…...
:冒泡排序、选择排序、插入排序)
探索排序算法的奥秘(上):冒泡排序、选择排序、插入排序
在计算机科学中,排序算法是数据处理的基础工具之一。通过对数据进行有序排列,可以极大地提高数据检索和处理的效率。本文将详细介绍三种经典的排序算法:冒泡排序、选择排序和插入排序。我们将从算法思想、原理、代码实现(C语言、P…...

Stable Diffusion 技术全景解析与行业竞争力分析
目录 一、Stable Diffusion 技术概览 1. 核心背景 2. 技术架构 二、行业地位与竞品对比 1. 市场定位 2. 核心竞争优势 三、部署成本与硬件要求 1. 硬件配置方案 2. 优化技巧 四、优势与劣势分析 1. 核心优势 2. 主要劣势 五、开源策略与商业模型 1. 开源协议 2. …...

基于Python的DeepSeek API图形界面开发
基于Python的DeepSeek API图形界面开发 在人工智能技术广泛应用的今天,如何将强大的API能力与用户友好的界面结合,成为开发者关注的重点。本文将以DeepSeek API为例,详解如何通过Python构建兼具功能性与美观度的GUI应用程序。 一、技术架构…...

w~嵌入式C语言~合集4
我自己的原文哦~ https://blog.51cto.com/whaosoft/13870376 一、STM32怎么选型 什么是 STM32 STM32,从字面上来理解,ST是意法半导体,M是Microelectronics的缩写,32表示32位,合起来理解,STM32就是指S…...
领域常用数据集介绍)
自动驾驶(ADAS)领域常用数据集介绍
1. KITTI 数据集 简介:由德国卡尔斯鲁厄理工学院与丰田研究院联合创建,是自动驾驶领域最经典的评测基准,涵盖立体视觉、光流、3D检测等任务。包含市区、乡村和高速公路场景的真实数据,标注对象包括车辆、行人等,支持多…...

【嵌入式八股23】Linux关键指令
系统关机命令 在 Linux 系统中,有多种命令可用于实现系统关机或重启操作,以下为你详细介绍各命令及其特点: 指令 说明 shutdown该命令能够安全地将系统关机。它允许用户指定关机的时间,还可以在关机前向所有登录用户发送警告消息。例如,shutdown -h now 可立即关机,shu…...
布里尔分数)
机器学习的一百个概念(13)布里尔分数
前言 本文隶属于专栏《机器学习的一百个概念》,该专栏为笔者原创,引用请注明来源,不足和错误之处请在评论区帮忙指出,谢谢! 本专栏目录结构和参考文献请见[《机器学习的一百个概念》 ima 知识库 知识库广场搜索: 知识库创建人机器学习@Shockang机器学习数学基础@Shocka…...
终极指南:从入门到精通(附实战案例))
AI提示词(Prompt)终极指南:从入门到精通(附实战案例)
在AI重塑工作方式的今天,掌握Prompt工程已成为智能时代的必备技能。本指南系统解析提示词设计精髓,从认知底层逻辑到实战应用技巧,带您解锁AI工具的完整潜能。涵盖主流模型选型策略、三大黄金法则、结构化模板及典型避坑指南,更有…...

鸿蒙版电影app设计开发
鸿蒙电影购票APP项目介绍 一、项目概述及使用方式 (一)项目概述 在智能手机与移动互联网蓬勃发展的当下,移动设备已成为人们生活不可或缺的一部分,而电影购票这一日常娱乐消费行为也日益向移动端迁徙。鸿蒙系统作为新兴力量&…...

如何启动jar包隐藏cmd窗口
要启动一个JAR文件并隐藏命令行窗口(cmd),你可以使用不同的方法,具体取决于你的操作系统。以下是几种常见的方法: 在Windows中使用批处理文件 你可以创建一个批处理文件(.bat文件),…...

【Redis】基础3:一些应用场景
文章目录 1. session管理1.1 手机号登录流程1.2 session的数据结构设计1.2.1 一些概念1.2.2 session数据结构例子 1.3 引入redis来实现共享session1.3.1 流程发送验证码短信的流程验证码登录流程登录检查流程 1.3.2 要考虑的问题 2. 限时抢购代金券2.1 业务流程2.2 代金券表设计…...
)
【创新实训个人博客】multi-agent调研(2)
下面的部分我们将简单介绍现有的三个multi-agent框架,并对它们进行简单的比较 multi-agent框架分析 MetaGPT 相关资料 代码repo:https://github.com/geekan/MetaGPT论文:https://arxiv.org/pdf/2308.0035 AgentVerse 相关资料 代码repo&…...

对鸿蒙 Next 系统“成熟论”的深度剖析-优雅草卓伊凡
对鸿蒙 Next 系统“成熟论”的深度剖析-优雅草卓伊凡 在科技飞速发展的当下,鸿蒙 Next 系统无疑成为了众多科技爱好者与行业人士关注的焦点。今日,卓伊凡便收到这样一个饶有趣味的问题:鸿蒙 Next 系统究竟需要多长时间才能完全成熟ÿ…...

模方ModelFun瓦片数据操作教程
摘要:本文主要介绍模方ModelFun瓦片数据操作,包含:打开/关闭瓦片数据,备份和恢复,导出 OBJ/ OSGB,导出DOM/DSM。 1.打开/关闭瓦片数据 在“总体模型视图/OSGB”里对 tiles 进行操作:选择&…...
)
RabbitMQ应用(基于腾讯云)
1.防火墙配置 关于RabbitMQ的远程,主要有4个端口需要开通【入站规则】,分别是: 端口 5672:这是 RabbitMQ 的默认 AMQP(Advanced Message Queuing Protocol)端口,用于客户端与 RabbitMQ 服务器之…...

堆和二叉树的概念和操作
目录 1.树的概念 1.1数的表示 1.2二叉树 1.3特殊的二叉树 1.3.1满二叉树 1.3.2完全二叉树 1.3.3 二叉树存储结构 2.堆 2.1堆的实现 初始化和销毁 堆的插入 堆的向上调整算法编辑 编辑 堆的删除 出堆顶 1.树的概念 树是非线性的数据结构,有限节点具有的层…...

互联网大厂Java面试实录:从Spring Boot到微服务架构的技术问答
互联网大厂Java面试实录:从Spring Boot到微服务架构的技术问答 在某互联网大厂的面试现场,严肃的面试官开始了对求职者谢飞机的技术考核。此次面试围绕Java技术栈的应用与场景展开。 第一轮:基础架构与语言 面试官: 请你用简单…...

Rollup、Webpack、Esbuild 和 Vite 前端打包工具
Rollup、Webpack、Esbuild 和 Vite 都是前端开发中常用的打包工具,它们各有特点,以下是对它们的详细对比: 核心功能 Rollup:专注于 JavaScript 模块打包,擅长将小的 JavaScript 模块打包成一个或多个文件,…...

刀客独家 | 潘胜接管百度移动生态市场部
一、 据刀客doc向独家信源确认,百度移动生态事业群(MEG)市场部日前完成重要人事调整:潘胜已经接任市场负责人。 此前,根据雷锋网3月底的报道,百度云渠道生态总经理陈之若离职,原移动生态事业群…...

如何在Chrome浏览器中启用硬件加速【提升浏览器性能】
在使用谷歌浏览器时,硬件加速是提升性能的一个重要功能。它可以将一些计算任务从CPU转移到GPU,从而加速图像处理、视频播放等任务。如果您希望提升浏览器的运行速度,可以通过以下简单步骤启用硬件加速。 1. 打开Chrome浏览器设置 首先&#…...

部署mongodb三幅本集群
背景:原先使用的mongodb采用的是SSPL协议,此协议客户检测到有bug,故需要替换mongodb的版本,原先采用helm部署的mongodb但是无法找到4.1.4版本的chart包,故手写yaml部署 1、部署mongodb-arbiter服务 这个服务是用来选…...
:对象解构与高级应用)
JavaScript 解构赋值(下):对象解构与高级应用
对象解构赋值 基本语法 const person { name: Alice, age: 30 }; const { name, age } person;console.log(name); // Alice console.log(age); // 30别名 const { name: fullName, age: years } person; console.log(fullName); // Alice console.log(years); // 30…...
和顺序级负载均衡(Sequence-Wise Load Balance))
批量级负载均衡(Batch-Wise Load Balance)和顺序级负载均衡(Sequence-Wise Load Balance)
本文主要比较了批量级负载均衡(Batch-Wise Load Balance)和顺序级负载均衡(Sequence-Wise Load Balance)在 Mixture-of-Experts(MoE)模型训练中的核心区别 。批量级负载均衡通过对整个训练批次的专家负载进行平衡约束,实现了更灵活的均衡策略,有助于专家在不同领域的专…...

什么是EI期刊?EI目录列表如何看?一文查看最新目录+避坑指南
近期有很多人在后台问小编关于EI期刊的各种问题,且前段时间EI期刊目录刚刚更新,小编正好借此,这期仔细给大家介绍一下。 什么是EI期刊? EI期刊也称为工程索引期刊,是供查阅工程技术领域文献的综合性情报检索刊物。每年…...

[创业之路-341]:华为人力资源管理 - 华为技术专家体系详解
华为技术专家体系详解 一、技术专家等级划分 华为技术专家体系以 “专业能力管理贡献” 为双维度,覆盖 19级(技术专家B)至22级(集团核心领导者),其中 19B-20A级 为核心技术专家层级: 19B级&a…...

【HarmonyOS 5】鸿蒙检测系统完整性
【HarmonyOS 5】鸿蒙检测系统完整性 一、前言 从现实安全威胁来看,设备系统完整性风险已影响至移动应用的各个场景。不少用户因使用越狱设备(Jailbreak)或非真实设备(Emulator),导致应用安全防护机制失效…...

量子网络:构建未来通信的超高速“高速公路”
在当今数字化时代,通信技术的飞速发展极大地推动了全球信息的流动和共享。然而,随着数据量的爆炸式增长和对信息安全需求的不断提高,传统通信网络正面临着前所未有的挑战。量子网络作为一种新兴的通信技术,以其超高速传输和绝对安…...

安卓触摸事件分发机制分析
1. 前言 🎯 一句话总结: 触摸事件(TouchEvent)会从 Activity 层开始,按从外到内的方式传递给每一个 ViewGroup/View,直到某个 View 消费(consume) 它,事件传递就会停止…...
)
Servlet (简单的servlet的hello world程序)
Servlet servlet在20年前左右,是网站开发的一种主力技术. 现在随着时间的推移,Java这个圈子中,逐渐使用spring代替了servlet.现在讲servlet,目的有两个方面. 1.spring作为一个框架.底层仍然是需要调用servlet里的一些api的,包括熟悉servlet有助于理解spring工作原理.包括spr…...

解析 OpenHarmony、HarmonyOS 与 HarmonyOS Next:优雅草卓伊凡的观点
解析 OpenHarmony、HarmonyOS 与 HarmonyOS Next:优雅草卓伊凡的观点 在科技领域,围绕操作系统的讨论从未停歇,其中 OpenHarmony、HarmonyOS 及其后续版本 HarmonyOS Next 备受瞩目。优雅草的卓伊凡对此有着深入见解,在此为大家详…...

Redis03-基础-C#客户端
零、文章目录 Redis03-基础-C#客户端 1、安装NuGet包 dotnet add package Newtonsoft.Json -v 13.0.3 dotnet add package StackExchange.Redis -v 2.8.242、操作帮助类实现 /*** 主题:Redis帮助类 功能:1、设置连接字符串、选择数据库2、String操作…...

JimuBI 积木报表 v1.9.5发布,大屏和仪表盘,免费数据可视化
项目介绍 JimuBI (积木报表BI) 是一款免费的数据可视化产品,含大屏和仪表盘、门户、移动图表,像搭建积木一样完全在线设计! 大屏采用类word风格,可以随意拖动组件,想怎么设计怎么设计,可以像百度和阿里一样…...

有关爬虫中数据库的封装——单线程爬虫
在编写爬虫程序时,数据存储是一个非常重要的环节。尤其是在单线程爬虫中,虽然并发量不大,但如果每次操作数据库都直接连接、查询、关闭,不仅代码臃肿,还容易出错,甚至影响爬虫的稳定性。 因此,…...

React19 useOptimistic 用法
用法 乐观更新 发起异步请求时,先假设请求会成功立即更新 UI 给用户反馈若请求最终失败,再将 UI 恢复到之前的状态 const [optimisticState, addOptimistic] useOptimistic(state, updateFn) 参数 state:实际值,可以是 useSta…...