UniOcc:自动驾驶占用预测和预报的统一基准
25年3月来自 UC Riverside、U Wisconsin 和 TAMU 的论文"UniOcc: A Unified Benchmark for Occupancy Forecasting and Prediction in Autonomous Driving"。
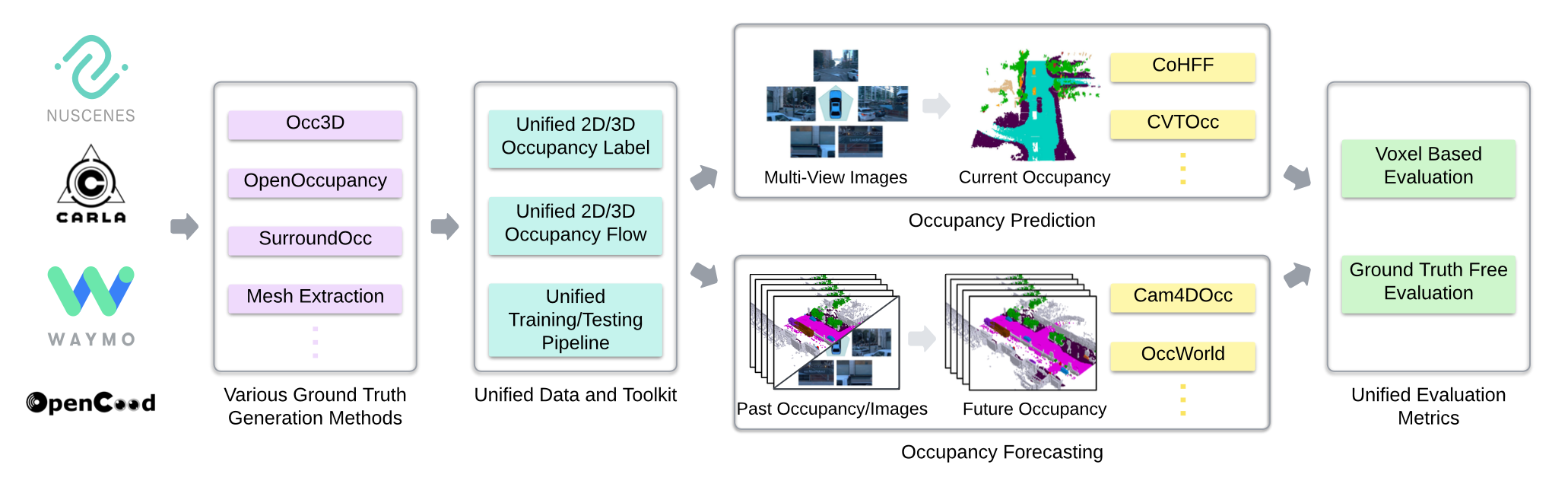
UniOcc 是一个全面统一的占用预测基准(即基于历史信息预测未来占用)和基于摄像头图像的当前帧占用预测。UniOcc 整合来自多个真实数据集(例如 nuScenes、Waymo)和高保真驾驶模拟器(例如 CARLA、OpenCOOD)的数据,提供带有逐体素流标注的 2D/3D 占用标签,并支持协作自动驾驶。在评估方面,与依赖次优伪标签进行评估的现有研究不同,UniOcc 采用不依赖于真实占用的全新指标,从而能够对占用质量的其他方面进行稳健评估。通过对最先进模型进行大量实验,证明大规模、多样化的训练数据和明确的流信息可显著提升占用预测和预报性能。
UniOcc 概述如图所示:
如下表所示:UniOCC和其他占用数据集的比较

统一的数据格式和特征
基准测试支持各种以占用为中心的任务,包括占用预测、单帧占用预测和流量估计。该框架定义以下与任务无关的数据格式:
语义占用标签。将场景表示为一个 3D 体素网格 G ∈ {0,…,C},其中 C 表示类别数,L、W、H 分别表示网格沿自车航向轴、横轴和纵轴的尺寸。该网格以自车为中心,+x 轴与行驶方向对齐,+y 轴向左,+z 轴向上。对于某些 2D 任务(例如,运动规划),通过优先级方案(例如,行人 > 汽车 > 道路)折叠高度维度,使得每个垂直柱采用其最高优先级体素的标签。这种方法可以防止重要目标类别(例如行人)被同一网格列中优先级较低的标签遮挡,从而确保后续任务能够获得有意义的表示。
摄像机图像。将原始 RGB 图像存储在四维张量 I ∈ {0,…,255} 中,K_cam 表示机载摄像机的数量,每幅图像的分辨率为 Img_x × Img_y。
摄像机视场 (FOV) 掩码。二元的三维张量 U ∈ {0, 1} 表示哪些体素位于每个摄像机的可观察视锥体内(U = 1 表示可见体素,U = 0 表示其他体素)。对于需要明确描绘遮挡区域或未观察空间的基于摄像机占用方法而言,此掩码至关重要。
摄像机内参和外参。将相机内参表示为 Int,而外部变换(从每个相机到自身坐标系)则表示为 Ext,其中 SE(3) 表示一组三维齐次变换。这些参数统一从三维自身坐标系到二维图像平面的投影。
自身到世界坐标系的变换。齐次变换矩阵 T_e^w 表示自身车辆在全局世界坐标系中的姿态,从而能够精确地对齐来自多个传感器和坐标系的数据。
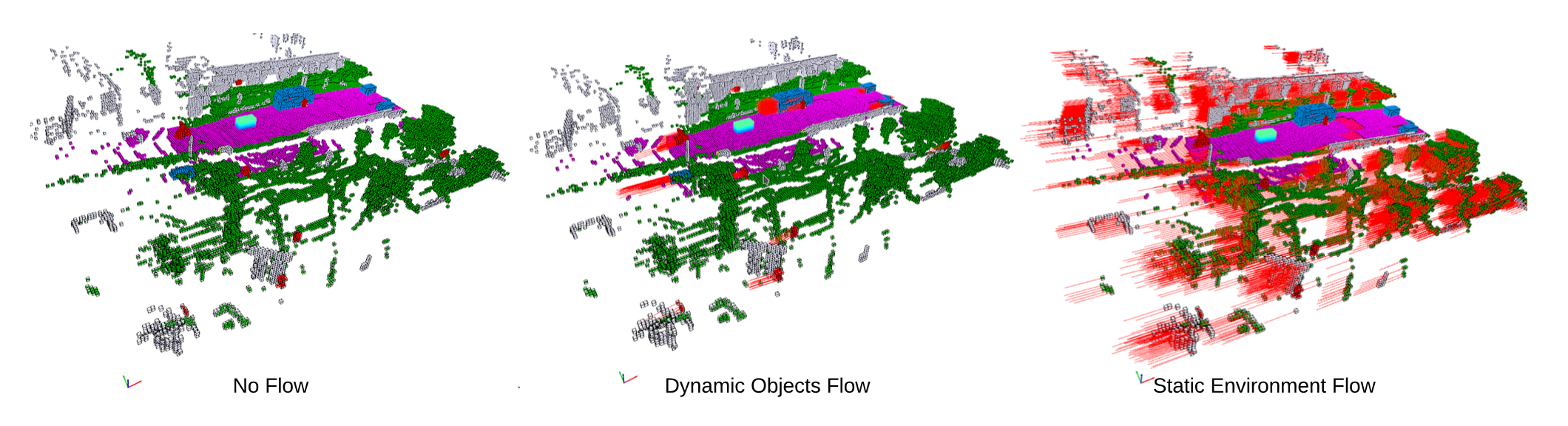
前向占用流。定义一个四维张量 F,用于记录每个体素的前向运动矢量。与之前的方法 [49] 为物体的所有体素分配单一速度(因此忽略物体的旋转)不同,该方法计算单个体素流,同时捕捉平移和旋转。分别计算动态前景目标(例如汽车、行人)和静态背景环境(例如道路、植被)的光流,并将动态和静态光流合并到 F_n^t 中。如图所示,这种体素级光流捕捉完整的三维运动,包括旋转。
后向占用光流。与前向光流类似,定义一个四维张量 B 来捕捉后向运动矢量。不是计算每个体素从 t 到 t + 1 的位移,而是评估从 t 到 t − 1 的运动。这种后向光流对于那些受益于逆-时间监督或多个-未来训练策略的模型尤其有用 [24]。
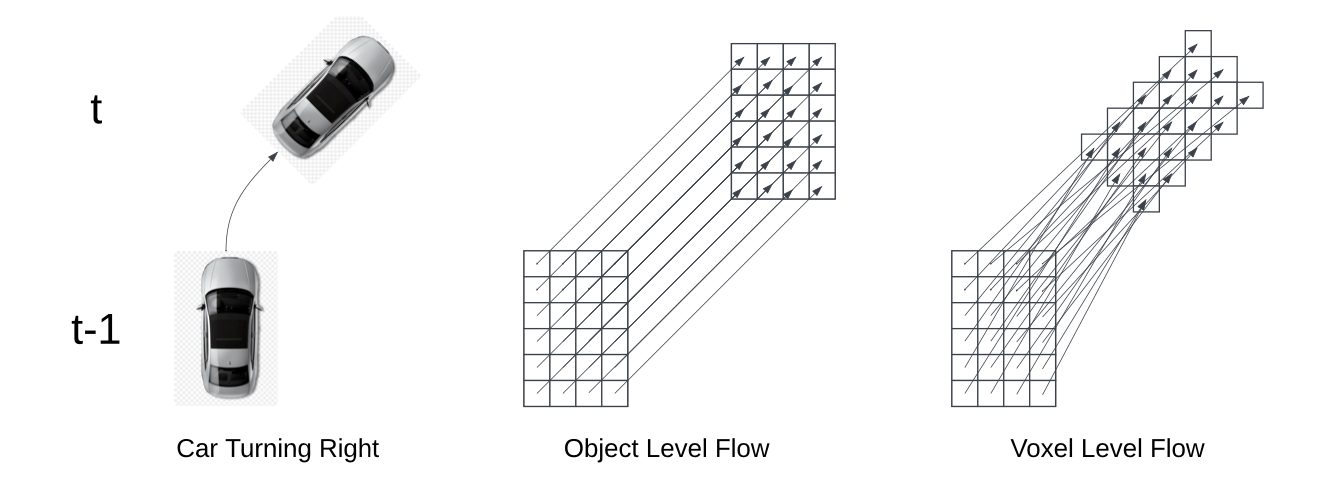
如图所示目标级和体素级流示意图(二维),表示一辆汽车右转。目标级流为所有体素分配相同的速度矢量,从而忽略汽车的旋转。
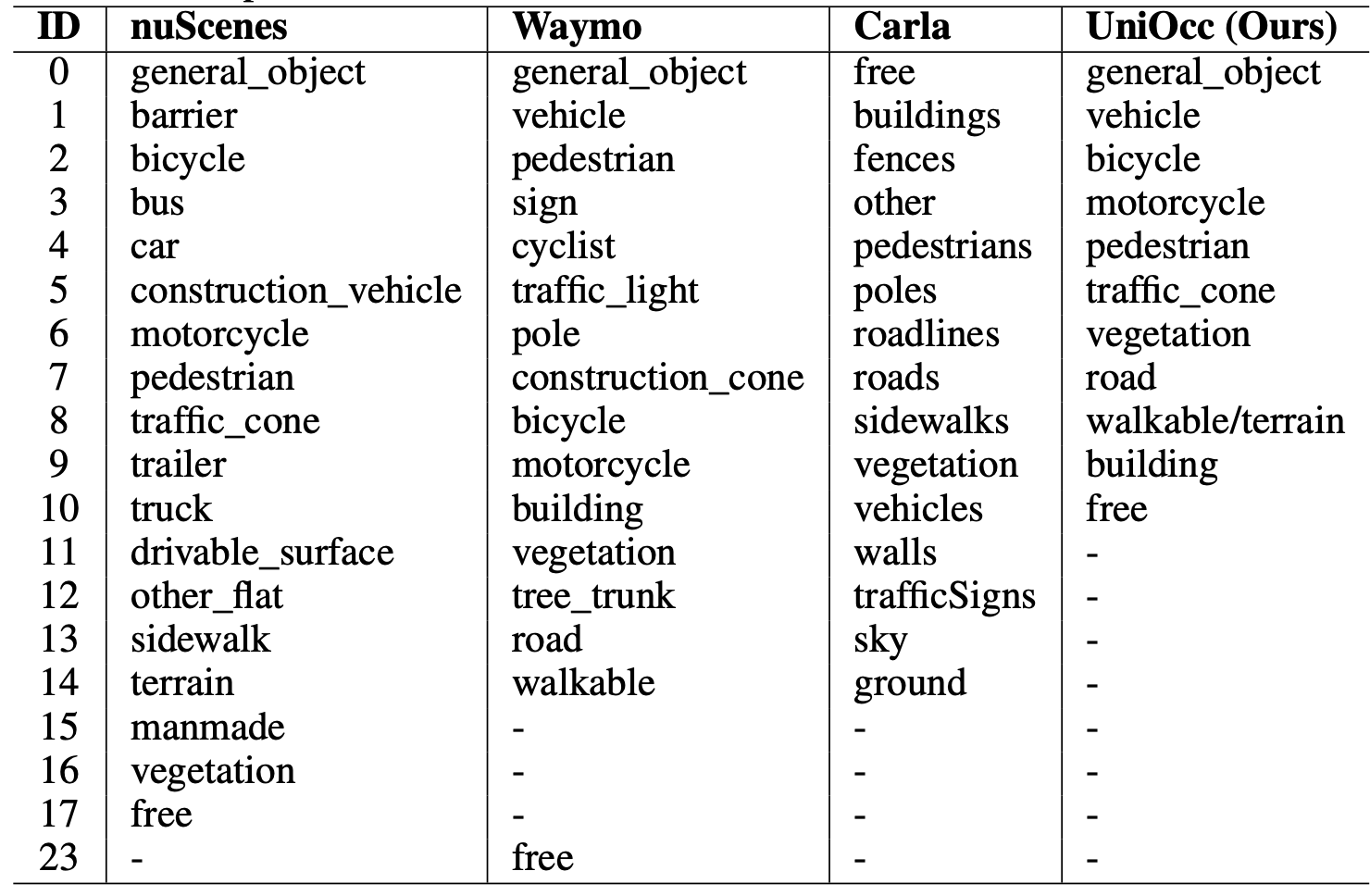
目标注释。还以字典列表的形式提供目标级注释,每个字典包含:(1) 智体到自车的转换。变换矩阵 T_a^e 将智体的局部坐标系映射到自车框架。这可以捕捉智体相对于自车的位置和方向。(2) 尺寸。一个 3D 向量 d,描述智体的边框尺寸(长、宽、高)。(3) 类别。目标的语义类别标签,定义见如下表:
任务类别
统一的输入支持广泛的以占用为中心的任务,涵盖静态预测和动态预测。通过在多个领域采用统一的表示,简化了跨数据集训练,并允许公平地比较解决不同子问题的方法。下面,概述三个代表性任务:
占用预测。在此,模型使用过去 W_obs 个相机帧 {It−W_obs,…,t},以及它们的视场掩码 {Ut−W_obs,…,t} 和相机参数(内参 Int,外参 Ext)。输出是当前的 3D 占用网格 G^t,它捕获时间 t 的场景。
使用可选流进行占用预测。在预测设置中,输入是 W_obs 个帧的历史数据——体素网格 {Gt−W_obs,…,t} 或相机图像 {It−W_obs,…,t}。该模型预测未来的占用 {Gt,…,t+W_fut},并可选择以细粒度的自车轨迹 T_e^w, t: t+W_fut^ 或高级驾驶意图(例如,右转)为条件。对于某些用例,预测方法还可以生成未来流 F^t: t+W_fut^ 或未来自车运动 T_e^w,t: t+W_fut。这种联合占用和流预测方案,有助于捕捉随时间推移的复杂运动模式。流场默认位于自车坐标系中,但可选择为旋转不变模型提供以智体为中心的流变型 [44, 63]。
基于可选流的协作占用预测和预报。在协作设置下,多辆车联网车辆 (CAV) 通过共享图像或占用数据进行协作。从自车的角度来看,它接收共享的历史观测值 {I_CAVt−W_obs,…,t} 或 {G_CAV^t−W_obs,…,t},以及将 CAV 帧映射到自我帧的变换。输出保持不变(即单-自车占用或预测),但增加的视点覆盖范围可以减轻遮挡并提升整体场景理解。
统一数据集
从以下来源构建统一数据集:
• nuScenes [3] 和 Waymo [35]。这两个数据集都提供摄像头图像、激光雷达扫描数据和目标级标注。由于它们均未直接包含 3D 占用标签,通过三个伪标签流程——Occ3D [36]、OpenOccupancy [43] 和 SurroundOcc [48]——来合成占用真值。这种多工具方法提高标签输出的鲁棒性和多样性。
• CARLA [5]。使用 CARLA 的仿真引擎生成无限多样的虚拟驾驶场景,从中提取“完美”的 3D 占用标签(网格、目标状态等)。这些逼真且可控的场景已公开发布,可轻松进行大规模训练。该框架支持生成任意长度的数据。
• OpenCOOD [54]。OpenCOOD 基于 CARLA 构建,提供多车协作场景。扩展其数据生成脚本,以便从模拟网格导出 3D 占用信息,从而通过协作驾驶示例扩展数据集。
统一占用处理工具包
大多数基于占用信息的方法仅专注于生成占用网格,但提供的下游处理或运动分析工具有限。为了弥补这一缺陷,其框架包含一个工具包,用于直接在体素空间内进行目标分割和跟踪,从而支持更高级的任务,例如形状分析或运动规划。
目标识别
给定一个占用网格 G ∈ {0, …, C },按照以下步骤识别和分割相关目标,如图所示:

- 目标分割。按类别(例如,汽车、行人)提取体素,然后通过广度优先搜索实现 6 连通域标记 (CCL):
L = CCL(G), t ∈ {0,1,…,T}, (1)
其中 L ∈ {1,…,N} 为每个连通域分配一个唯一的目标 ID,N 为目标总数。
- 体素提取。对于每个目标 ID n,收集其体素坐标 V_n:
V_n = {< x,y,z > | L(x,y,z) = n}, (2)
-
横轴边框。体素预测可能不完整(如图所示),因此直接测量边框(长度、宽度、高度)并不可靠。因此,使用旋转卡尺法(rotating calipers) [38] 在水平面上拟合一个边界矩形,其目标体素数量为 O(n^2),假设每个目标平行于地面运动。这将得到一个二维最小边界矩形,由此可以恢复航向和平面大小。
-
维度提取。将矩形的长和宽作为内部的平面尺寸,然后根据体素的垂直范围计算高度。所有尺寸均按体素分辨率 ε 缩放,转换为公制单位。
目标跟踪
利用体素预测的前向占用光流,还提供一种简单的基于占用光流的目标跟踪算法:
- 目标体素提取。对于第 t 帧占用网格中已识别的每个目标,检索其体素坐标 V_nt(2)和相应的光流矢量 F_n^t。
- 步长预测。通过添加流来估计下一帧体素位置 ~V_n^t+1:
~V_nt+1 = V_nt + F_n^t,(3)
- 质心提取。令 ~c_nt+1 为预测体素集 ~V_nt+1 的质心。还计算第 t + 1 帧的真实目标体素 V _nt+1 及其质心 c_n^t+1。
- 二分关联。使用匈牙利算法将预测质心 {~c_pt} 与观测质心 {c_q^t+1} 进行匹配,以最小化成对距离。
上述过程产生跨帧关联,可以统一随时间变化的目标身份,从而能够直接在体素空间中进行运动解释和分析。
目标对齐
最后,将追踪目标的体素集对齐,以便进行形状分析或一致性检查:
- 平移对齐。将每个目标的体素坐标平移至原点中心,即 V ̄_n^t。
- 旋转对齐。将主成分分析 (PCA) 应用于每帧的体素集,以解析出一个规范的方向。为了保持一致性,调整新主轴的符号,使其与前一帧的方向对齐。最终旋转后的体素坐标表示为 ˆV_n^t。通过这些步骤,可以在占用网格域内进行完全以目标为中心的分析(例如,测量形状变化或旋转一致性),而无需参考真值标签或注释。
统一评估指标
基准测试包含多个用于评估生成或预测占用网格质量的指标。
基于体素的评估
基于先前的占用预测 [57] 和预测 [2, 42, 47, 61] 研究,采用两个标准指标:几何 IoU(或简称为 IoU_geo)和 mIoU(跨语义类别的平均交并比)。具体来说,对于预测的占用网格 G_pred 和真实网格 G_gt,

对于多类别占用(总共 C 个类别),mIoU 的计算方式如下:

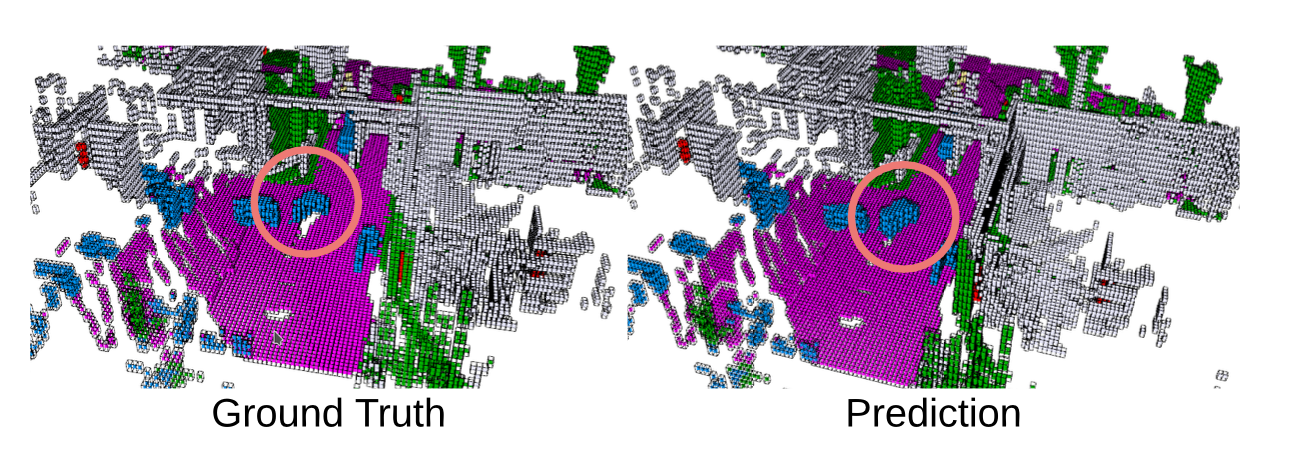
虽然这些基于体素的指标很简单,但它们可能会惩罚超过伪真实值的预测(如图所示)。此外,像多模态预测这样的任务,可能会产生许多单一参考标签无法捕捉的合理未来结果。出于这些原因,本文提出一些不需要完美真实值的评估策略。
无真值评估
除了依赖标签的 IoU 之外,其提出一些无需参考单一真值场景即可评估几何合理性的指标。这些指标对于多模态生成或真值标签不完整的情况尤其有用。
关键目标的维度概率。给定一个预测目标的边框 < l, w, h>,并将其归类为类别 c,通过计算高斯混合模型 (GMM) 的似然来评估其合理性。具体来说,每个类别 c 都有一个预训练的 GMM,记为 GMM_c,该模型是从统一数据集中的真实或合成数据中学习而来的。在推理时,使用目标的尺寸来查询 GMM_c。这个查询概率 P_n 可以启发式地判断该目标是否具有与其报告类别相符的实际尺寸。使用经验值 ρ = 0.5 作为阈值来确定该形状是否真实存在。
时域前景目标形状一致性。对于跨多帧预测的动态目标,通过随时间序列对齐每个目标的体素并计算体素交集而非并集来测量形状一致性 IoU_object。较高的 IoU_object 表示从 t 帧到 t + 1 帧的形状几何形状稳定。然后,在每个类别中计算这些 IoU 的平均值,以评估整体的随时间序列一致性。
时域背景环境一致性。对于静态背景区域,预期在重叠视野内的连续帧之间持续占用。令 V_et 为时间 t 时的环境体素,~V_e^t+1 为它们在 t + 1 时的投影坐标(使用已知的自车运动)。舍弃超出边界的体素,并计算重叠部分的二值 IoU,即 IoU_bg。即使没有完美的真实标签,较高的 IoU_bg 也表明跨帧的静态背景一致。
总体而言,这些无真实值的指标补充标准 IoU,能够更深入地洞察场景真实性和时间连贯性,这对于生成性或多模态占用任务尤其有价值。
相关文章:

UniOcc:自动驾驶占用预测和预报的统一基准
25年3月来自 UC Riverside、U Wisconsin 和 TAMU 的论文"UniOcc: A Unified Benchmark for Occupancy Forecasting and Prediction in Autonomous Driving"。 UniOcc 是一个全面统一的占用预测基准(即基于历史信息预测未来占用)和基于摄像头图…...

反向代理和DDNS的区别是什么?
反向代理(Reverse Proxy)和动态域名解析(DDNS,Dynamic Domain Name System)是两种不同的网络技术,虽然它们都与外部访问内部服务相关,但解决的问题和应用场景完全不同。具体区别如下:…...

markdown展示数学公式
要让Markdown正确展示数学公式,你需要使用支持数学公式渲染的工具,比如在支持LaTeX语法的Markdown编辑器中进行编写。 Markdown本身并不原生支持数学公式的渲染,但许多Markdown解析器(例如在GitHub、Jupyter Notebooks、或一些博…...
)
服务器编译环境配置及数据接收脚本编写(11)
文章目录 一、本章说明二、云端服务器Python编译环境配置三、传感数据解析脚本编写一、本章说明 注:本节为【基于STM的环境监测系统(节点+云服务器存储+QT界面设计)】项目第11篇文章,上面两篇介绍了云服务器数据库的安装与相关设置,本章主要介绍在服务器中安装Python编译…...

硬件基本概念
目录 基本概念 电压 电流 串联、并联 欧姆定律 电路仿真网址: 功率 焦耳定律 AC220V 转 DC5V 基本电子元器件了解 电阻:(电阻器) 电容 电感 继电器 二极管 三极管 晶振(晶体振荡器) 光耦…...

Spark与Hadoop之间的联系与区别
联系 生态系统互补: Hadoop 是一个分布式存储和计算平台,主要包括 HDFS(分布式文件系统)和 MapReduce(分布式计算框架)。Hadoop 提供了可靠的数据存储和分布式计算的基础。 Spark 是一个高性能的分布式计算…...

spark和Hadoop之间的对比与联系
对比 计算模型: Hadoop:采用MapReduce计算模型,分map与reduce两个阶段,数据处理按阶段顺序执行,数据处理按阶段顺序执行,中间结果会写入磁盘,I/O开销大。 Spark:基于弹性分布式数…...

0802api设计和实战-网络ajax请求1-react-仿低代码平台项目
文章目录 1 API设计1.1 用户功能1.1.1 获取用户信息1.1.2 注册1.1.3 登录 1.2 问卷功能1.2.1 获取单个问卷1.2.2 获取问卷列表1.2.3 创建问卷1.2.4 更新问卷1.2.5 批量彻底删除问卷1.2.6 复制问卷 1.3 小结 2 实战2.1配置axios2.2 封装API和测试2.3 新建问卷2.4 自定义hooks封装…...

什么是CAN的非破坏仲裁?
CAN总线的非破坏性仲裁是一种在多个设备同时发送数据时,通过标识符(ID)优先级来决定哪个设备可以优先发送数据的机制。其核心思想是:当多个设备同时发送数据时,ID值较小的数据具有更高的优先级,能够优先…...

无线监控系统分类全解析:搭配视频融合平台EasyCVR开启高效监控
随着技术的发展,无线监控系统在家庭、小型企业、特定行业以及室外恶劣环境中的应用越来越广泛。本文将介绍几种常见的无线监控系统,分析其优缺点,并结合EasyCVR视频融合平台的功能,探讨如何优化无线监控系统的性能和应用。 一、主…...
)
并行RANSAC平面拟合(C++)
依赖库 1)Eigen 2)GLM 算法大致思路 Step 1:源点云随机采样3个点; Step 2:3个点拟合平面,统计符合该平面模型的点,为inlier点; Step 3:判断inlier点比例是否达到阈…...

Docker核心技术精讲:从入门到企业级实战
第一章>Docker概述 第二章>Docker安装与镜像下载加速 第三章>镜像 第四章>容器 第五章>发布镜像到阿里云或私有化仓库 第六章>容器卷 第七章>Docker安装常用软件 第八章>Docker高级版-Mysql主从复制、Redis主从、分布式存储 第九章>Doc…...

【KWDB 创作者计划】_深度学习篇---向量指令集
文章目录 前言一、加速原理数据级并行(DLP)计算密度提升减少指令开销内存带宽优化隐藏内存延迟 二、关键实现技术1. 手动向量化(Intrinsics)优势挑战 2. 编译器自动向量化限制 3. BLAS/LAPACK库优化4. 框架级优化 三、典型应用场景…...

音视频小白系统入门课-4
本系列笔记为博主学习李超老师课程的课堂笔记,仅供参阅 往期课程笔记传送门: 音视频小白系统入门笔记-0音视频小白系统入门笔记-1音视频小白系统入门笔记-2音视频小白系统入门笔记-3 将mp4文件转换为yuv文件 ffmpeg -i demo.mp4 # 输入文件-an …...

CS144 Lab3 实战记录:TCP 发送器实现
文章目录 1 实验背景与目标2 TCP发送器的实现2.1 整体流程2.2 核心组件2.3 窗口管理2.4 关键函数实现2.4.1 push函数2.4.2 receive函数2.4.3 tick函数 3 仓库地址 1 实验背景与目标 在 TCP 协议中,发送器(TCP Sender)是实现可靠传输的核心组…...
Transformer:引领深度学习新时代的架构
引言 在深度学习的快速发展历程中,Transformer 架构如同璀璨的新星,照亮了自然语言处理(NLP)以及计算机视觉(CV)等众多领域的前行道路。自 2017 年在论文《Attention Is All You Need》中被提出以来&#…...

基于RabbitMQ实现订单超时自动处理
基于RabbitMQ实现订单超时自动处理 引言 在现代电商系统中,订单超时自动取消是一个常见的业务需求。传统的定时任务扫描数据库的方式存在性能瓶颈和实时性差的问题。本文将介绍如何使用RabbitMQ的消息队列和死信队列特性,构建一个高效可靠的订单超时自…...

nginx实现同一个端口监听多个服务
nginx实现同一个端口监听多个服务 前言原理配置不同域名基于路径(URL 路由)补充 总之完结撒花,如有需要收藏的看官,顺便也用发财的小手点点赞哈,如有错漏,也欢迎各位在评论区评论! 前言 受同…...

用 Firebase 和 WebRTC 快速搭建一款浏览器视频聊天应用
在现代 Web 应用中,实时音视频通信变得越来越普遍。本文将通过一个简洁实用的示例,带你一步步搭建一个基于 Firebase WebRTC 的浏览器视频聊天应用,帮助你理解 WebRTC 的核心通信机制以及如何借助 Firebase 进行信令传输。 🔧 技…...

记录一次OGG进程abended,报错OGG-01431、OGG-01003、OGG-01151、OGG-01296问题的处理
1. ogg进程abended的几种常见原因: 1. undo表空间不足导致abended。 2. 数据不一致,违反唯一约束导致abended。 3. 源端和目标端表结构不一致导致abended。 4. 源端表名过长,同步到目标端报错导致abended。 5. OGG-03517字符集转换问题导…...

机器学习分类算法详解:原理、应用场景与测试用例
机器学习分类算法详解:原理、应用场景与测试用例 一、基础分类算法 1. 决策树 原理: 通过递归划分数据集,选择信息增益(ID3)或基尼系数(CART)最大的特征作为分裂节点,构建树结构。叶节点代表分类结果。应用场景: 医疗诊断(需解释性,如判断疾病风险)。客户分群(如根…...

机器人仿真:相机信息仿真及显示
1)概要 除了激光雷达以外,机器人常用的视觉传感器还包括相机,相机图像能够获取真实世界的真实颜色和纹理信息,能够被用于进行目标检测、分割和追踪。 2)结果展示...

车载功能测试-车载域控/BCM控制器测试用例开发流程【用例导出方法+优先级划分原则】
目录 1 摘要2 位置灯手动控制简述2.1 位置灯手动控制需求简述2.2 位置灯手动控制逻辑交互图 3 用例导出方法以及优先级原则3.1 用例导出方法3.1.1 用例导出方法介绍3.1.2 用例导出方法关键差异分析 3.2 优先级规则3.2.1 优先级划分的核心原则3.2.2 具体等级定义与判定标准 3.3 …...

gem5-gpu教程05 内存建模
memory-modeling|Details on how memory is modeled in gem5-gpu ====== gem5-gpu’s Memory Simulation ====== gem5-gpu, for the most part, eschews GPGPU-Sim’s separate functional simulation and instead uses gem5’s execute-in-execute model. Therefore, memory …...

如何提升个人解决问题的能力?
提升个人解决问题的能力是一个系统性工程,涉及思维、知识、经验和心态的多方面提升。以下是一些具体且可操作的方法,帮助你逐步增强解决问题的能力: 1. 培养「结构化思维」 明确问题本质: 遇到问题时,先问自己&…...

CSS清楚默认样式
* {margin: 0;padding: 0;box-sizing: border-box;} 这段 CSS 代码是一个常见的全局样式重置代码块,它会对网页中的所有元素(通过通配符 * 选择器)应用相同的样式规则,下面分别解释每一条规则的作用。 margin: 0; 在 HTML 中&a…...

问题:raw.githubusercontent无法访问
问题:raw.githubusercontent无法访问 文章目录 一、问题二、hosts文件2.1、hosts文件简介2.2、hosts文件位置2.3、hosts文件修改 3、解决方法3.1、查询出raw.githubusercontent.com的ip地址3.2、在/etc/hosts里填写IP地址3.3、再次执行命令 4、一些常用IP地址 一、问…...

【C语言】文本操作函数fgetc、fputc、fgets、fputs、fprintf、fscanf、fread、fwrite
一、介绍 二、简要概括 三、函数的使用 1、fgetc和fputc int fgetc ( FILE * stream ); 从文件中读取信息,每次读取一个字符 从流中获取字符返回指定流的内部文件位置指示符当前指向的字符。然后将内部文件位置指示符推进到下一个字符 int main() {//打开文件FI…...
VTK C++开发示例 --- 分隔文本读取器)
(19)VTK C++开发示例 --- 分隔文本读取器
文章目录 1. 概述2. CMake链接VTK3. main.cpp文件4. 演示效果 更多精彩内容👉内容导航 👈👉VTK开发 👈 1. 概述 本例采用坐标和法线(x y z nx ny nz)的纯文本文件,并将它们读入vtkPolyData并显示…...

C++ 中 std::thread 的高级应用
C 中 std::thread 的高级应用、常见坑,以及如何封装为类,适合做线程池、异步任务、后台 worker、并发调度等场景。内容结构如下: 一、std::thread 高级用法清单 1. 线程成员函数调用(this 捕获) class Worker { publ…...

Linux之彻底掌握防火墙-----安全管理详解
—— 小 峰 编 程 目录: 一、防火墙作用 二、防火墙分类 1、逻辑上划分:大体分为 主机防火墙 和 网络防火墙 2、物理上划分: 硬件防火墙 和 软件防火墙 三、硬件防火墙 四、软件防火墙 五、iptables 1、iptables的介绍 2、netfilter/…...

Linux安装ffmpeg7.1操作说明
安装yasm Index of /projects/yasm/releases/ 下载最新版 wget https://www.tortall.net/projects/yasm/releases/yasm-1.3.0.tar.gz 解压 tar -zxvf yasm-1.3.0.tar.gz 编译及安装 ./configure make && make install 安装ffmpeg https://download.csdn.net/down…...

Java 加密与解密:从算法到应用的全面解析
Java 加密与解密:从算法到应用的全面解析 一、加密与解密技术概述 在当今数字化时代,数据安全至关重要。Java 加密与解密技术作为保障数据安全的关键手段,被广泛应用于各个领域。 加密是将明文数据通过特定算法转换为密文,使得…...

海思SDK的sensor驱动框架
对于海思的SDK之前一直对驱动的框架不清楚,只知道mpp的目录下的一些简单的业务demo,归根结底对这个SDK的框架还是不够了解,研究了一段时间才对该框架有一点认识。SDK是通过Makefile来管理和编译的所以对于Makefile文件需要有一定的理解&#…...

MyBatis-Plus 使用 Wrapper 构建动态 SQL 有哪些优劣势?
MyBatis-Plus (MP) 提供的 Wrapper (如 QueryWrapper, LambdaQueryWrapper, UpdateWrapper, LambdaUpdateWrapper) 是其核心特性之一,它允许我们在开发时以面向对象的方式构建 SQL 的 WHERE 条件、ORDER BY、SELECT 字段列表等部分。与传统的 MyBatis 在 XML 文件中…...

【PGCCC】Postgres 故障排除:修复重复的主键行
如何从表中删除不需要的重复行。这些重复行之所以“不需要”,是因为同一个值在指定为主键的列中出现多次。自从 glibc 好心地改变了排序方式后,我们发现这个问题有所增加。当用户升级操作系统并修改底层 glibc 库时,这可能会导致无效索引。 唯…...

Java多线程的暗号密码:5分钟掌握wait/notify
wait和join的区别 wait和join在使用上都是等待。 但是join是等待其他线程结束,而wait是等待其他线程的notify通知再运行。 当拿到锁的线程,发现要执行的任务时机不成熟的时候,使用wait进行阻塞等待,然后等时机成熟了再notify通…...

【重学Android】03.高版本 Android Studio 不能使用引用库资源ID的问题
问题背景 由于直接下载的最新版本Android Studio,然后直接创建的新项目,因此默认的工程配置相比以前的老版本有了不少的变化,Gradle的新版本使用,导致一些配置项也发生了变化,加上谷歌针对gradle.properties文件的一些…...

8. kubernetes的service原理
Kubernetes 的 Service 是集群内部和外部访问 Pod 的核心抽象层,解决了 Pod 动态 IP 变化及负载均衡问题。以下是其核心概念、原理及使用方法: 一、Service 的核心概念 概念说明服务发现通过标签选择器(selector)动态关联一组 Po…...
题解)
杭电oj(1087、1203、1003)题解
DP 即动态规划(Dynamic Programming),是一种通过把原问题分解为相对简单的子问题,并保存子问题的解来避免重复计算,从而解决复杂问题的算法策略。以下从几个方面简述动态规划: 基本思想 动态规划的核心在…...

解锁安防新境界:XS9933四通道多合一同轴高清解码芯片方案
在安防监控领域,高清、高效、便捷一直是行业追求的目标。今天,我们要为大家介绍一款具有突破性的产品——XS9933四通道多合一同轴高清解码芯片方案,它将为安防监控带来全新的体验。 一、强大性能,高清呈现 XS9933是一款4通道模拟复…...

Mysql之存储过程
🏝️专栏:Mysql_猫咪-9527的博客-CSDN博客 🌅主页:猫咪-9527-CSDN博客 “欲穷千里目,更上一层楼。会当凌绝顶,一览众山小。 目录 1.存储过程概述 2.存储过程的基本语法 2.1创建存储过程 2.2调用存储过…...

2.第二章:政策法规与标准体系
文章目录 2.1 全球数据治理政策概览2.1.1 欧盟GDPR2.1.2 美国数据法规2.1.3 亚太地区数据法规 2.2 国际标准体系2.2.1 ISO/IEC 270012.2.2 NIST框架2.2.3 DAMA DMBOK2.2.4 其他国际标准 2.3 中国数据治理法规体系2.3.1 《网络安全法》2.3.2 《数据安全法》2.3.3 《个人信息保护…...
 日常运维命令总结)
Kubernetes (k8s) 日常运维命令总结
一、资源查看 查看所有命名空间的 Pod kubectl get pod --all-namespaces查看指定命名空间的 Pod kubectl get pod --namespace <命名空间>查看所有部署(Deployments) kubectl get deployments.apps --all-namespaces查看所有守护进程集࿰…...
——LLM中激活函数详解)
NLP高频面试题(五十三)——LLM中激活函数详解
引言 在现代大型语言模型架构中,激活函数是贯穿神经网络各层的关键组件。它们通过为线性变换结果引入非线性,从而赋予模型表达复杂语言模式的能力。选择合适的激活函数,不仅影响训练的稳定性与收敛速度,还在推理阶段决定了计算效率与模型性能。本文将系统梳理常见激活函数…...

跨平台软件开发探讨
一、跨平台开发核心思路 1. 代码复用最大化 通过抽象平台差异实现核心逻辑复用,理想情况下70%代码可复用,仅30%处理平台特性。 2. 分层架构设计 业务逻辑层:完全平台无关(C/Rust) 平台适配层:封装系统AP…...

网络原理————HTTP
1,HTTP简介 我们上一期谈到了网络编程尤其是TCP和UDP,使用网络套接字来实现网络编程,上一期忘记说了,我们使用TCP的时候,我们用了线程池,这样就可以处理很多客户端而不会阻塞,那么如果客户端一…...

安装Jupyter Notebook 之不断报错 差点放弃版
error: subprocess-exited-with-error Preparing metadata (pyproject.toml) did not run successfully. │ exit code: 1 ╰─> [6 lines of output] Cargo, the Rust package manager, is not installed or is not on PATH. This package requires Rust and Cargo to com…...

w~大模型~合集13
我自己的原文哦~ https://blog.51cto.com/whaosoft/13864163 #TextRCNN、TextCNN、RNN 小小搬运工周末也要学习一下~~虽然和世界没关 但还是地铁上看书吧, 大老勿怪 今天来说一下 文本分类必备经典模型 模型 SOTA!模型资源站收录情况 模型来源论文 RAE …...

【华为】防火墙双击热备-之-主备模式-单外网线路
FW1和FW2的业务接口都工作在三层,上行连接二层交换机。上行交换机连接运营商的接入点,运营商为企业分配的IP地址为100.100.100.2。现在希望FW1和FW2以主备备份方式工作。正常情况下,流量通过FW1转发;当FW1出现故障时,流…...