计算机视觉——基于使用 OpenCV 与 Python 实现相机标定畸变校正
概述
相机标定是一种旨在通过确定相机的内参(焦距、光学中心、畸变系数)和外参(相机的位置和方向),提高图像在现实世界中的几何精度的过程。该过程可以纠正相机拍摄的图像中的畸变,使相机能够准确感知现实世界中的距离、角度和物体。一个很好的例子是纠正鱼眼相机拍摄的图像。
一、什么是相机标定
相机通过将其投影到二维平面上来捕捉现实世界。然而,由于光学元件和镜头的结构特性,这些图像可能会出现误差。最常见的误差是畸变和透视误差。相机标定通过计算相机的内参和外参来纠正这些误差,从而实现更准确的测量和几何计算。
关键参数
-
内参
- 焦距:根据镜头的焦距确定图像的大小。
- 光学中心(主点):相机镜头的中心点。
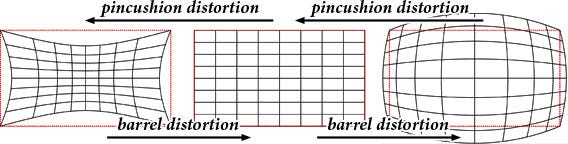
- 畸变系数:用于纠正镜头畸变,如桶形畸变和枕形畸变。(你可以在图 1 中清楚地看到这一点。)
注意:术语“畸变”指的是镜头引起的误差,如变形或弯曲。
-
外参
- 相机位置:相机相对于世界的位置(x、y、z 坐标)。
- 相机方向:相机相对于世界的视角(旋转角度)。

二、如何进行相机标定
通常使用已知的几何图案(如棋盘格)进行相机标定。该图案的已知尺寸和位置用作参考,以检测相机图像中的畸变。 标定过程包括以下步骤:
- 图像采集:要进行相机标定,你需要一组至少 15 张从不同角度拍摄的棋盘格图案的图像。该图案的角点有助于检测图像中的畸变。
- 角点检测:在每张图像中检测棋盘格图案的角点。正确检测这些角点对于准确标定至关重要。
- 内参和外参的计算:根据相机图像中的角点与它们的真实世界坐标之间的差异,优化并计算相机的内参和外参。通常使用 AI 算法或数学优化技术进行此计算。
- 畸变纠正:使用计算出的参数纠正图像中的畸变,去除非线性镜头畸变。
- 验证:为了测试标定的准确性,用相机拍摄一张新图像,并应用标定参数来纠正图像。然后观察纠正的准确性。


三、使用 OpenCV 在 Python 中进行相机标定
OpenCV 是 Python 中用于相机标定最常用的库之一。OpenCV 提供了相机标定和畸变纠正所需的函数。以下是简单的标定示例:
import cv2
import numpy as np
import glob# 棋盘格的尺寸(内部角点的数量)
grid_size = (9, 6)# 每个正方形的实际尺寸(2 厘米)
square_size = 2 # 厘米# 棋盘格的 3D 世界坐标
obj_points = np.zeros((grid_size[0] * grid_size[1], 3), np.float32)
obj_points[:, :2] = np.mgrid[0:grid_size[0], 0:grid_size[1]].T.reshape(-1, 2) * square_size# 用于存储标定所需点的列表
object_points = [] # 3D 世界坐标
image_points = [] # 2D 图像坐标# 存放标定图像的文件夹
images = glob.glob('calibration_images/*.jpg')for fname in images:img = cv2.imread(fname)gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)# 查找棋盘格的角点ret, corners = cv2.findChessboardCorners(gray, grid_size, None)if ret:object_points.append(obj_points)image_points.append(corners)# 可视化角点cv2.drawChessboardCorners(img, grid_size, corners, ret)cv2.imshow('Chessboard Corners', img)cv2.waitKey(500)cv2.destroyAllWindows()# 执行标定
ret, camera_matrix, dist_coeffs, rvecs, tvecs = cv2.calibrateCamera(object_points, image_points, gray.shape[::-1], None, None
)# 保存相机矩阵和畸变系数
np.savez('calibration_data.npz', camera_matrix=camera_matrix, dist_coeffs=dist_coeffs)# 打印标定结果
print("Camera Matrix:\n", camera_matrix)
print("Distortion Coefficients:\n", dist_coeffs)
四、代码解释
import cv2
import numpy as np
import glob
- cv2(OpenCV):我们导入 OpenCV,这是一个用于图像处理的库。该库提供了许多用于相机标定和图像处理的函数。
- numpy(np):我们导入 NumPy,以便轻松进行数值运算和处理数组。
- glob:用于组织文件路径并列出文件夹中的文件。在这里,它用于获取包含标定图像的文件夹中的所有图像。
grid_size = (9, 6)
- grid_size:指定棋盘格上内部角点的数量。在此示例中,棋盘格图案有 9 列和 6 行角点(9 列 × 6 行 = 54 个角点)。此值应与实际使用的棋盘格匹配。
square_size = 2 # cm
- square_size:棋盘格上的每个正方形的实际边长设置为 2 厘米。
obj_points = np.zeros((grid_size[0] * grid_size[1], 3), np.float32)
obj_points[:, :2] = np.mgrid[0:grid_size[0], 0:grid_size[1]].T.reshape(-1, 2) * square_size
- obj_points:我们创建棋盘格角点在真实世界坐标中的 3D 位置。每个角点的 Z 轴值设置为 0。
- np.zeros((grid_size[0] * grid_size[1], 3), np.float32):创建一个 3D 空矩阵,为每个角点包含(x、y、z)坐标。
- np.mgrid[0:grid_size[0], 0:grid_size[1]]:生成棋盘格上角点的(x、y)坐标。
注意:mgrid 是 NumPy 的一个函数,用于创建多维网格结构,其语法为 mgrid[start:end:step]。
例如:
# 二维网格(网格)
x, y = np.mgrid[0:3, 0:3]
print("X:\n", x)
print("Y:\n", y)
输出:
X:[[0 0 0][1 1 1][2 2 2]]
Y:[[0 1 2][0 1 2][0 1 2]]
- T.reshape(-1, 2):将二维角点转换为单个矩阵。
object_points = [] # 3D 世界坐标
image_points = [] # 2D 图像坐标
- object_points:一个列表,用于存储每张图像的 3D 真实世界棋盘格角点。
- image_points:一个列表,用于存储每张图像的 2D 图像角点。
images = glob.glob('calibration_images/*.jpg')
- images:查找
calibration_images文件夹中的所有.jpg文件,并将它们存储在一个列表中。这些是用于标定的棋盘格图案图像。
for fname in images:img = cv2.imread(fname)gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
- 此循环处理每张图像:
- cv2.imread(fname):读取由
fname指定的图像。 - cv2.cvtColor(img, cv2.COLOR_BGR2GRAY):将读取的图像从彩色(BGR)转换为灰度。在灰度图像上检测棋盘格图案更容易。
- cv2.imread(fname):读取由
ret, corners = cv2.findChessboardCorners(gray, grid_size, None)
- cv2.findChessboardCorners:尝试在灰度图像中查找棋盘格的角点。
- ret:一个标志(True/False),指示是否成功找到棋盘格的角点。
- corners:检测到的图像中角点的 2D 坐标。
if ret:object_points.append(obj_points)image_points.append(corners)
- 如果 ret 为
True,即成功找到棋盘格的角点:- object_points.append(obj_points):将 3D 真实世界坐标添加到列表中。
- image_points.append(corners):将 2D 图像坐标添加到列表中。
cv2.drawChessboardCorners(img, grid_size, corners, ret)
cv2.imshow('Chessboard Corners', img)
cv2.waitKey(500)
- cv2.drawChessboardCorners:通过在图像上绘制线条来可视化检测到的棋盘格角点。
- cv2.imshow:在一个新窗口中显示带有检测到的角点的图像。
- cv2.waitKey(500):显示图像 500 毫秒(0.5 秒)。
cv2.destroyAllWindows()
- cv2.destroyAllWindows:关闭所有打开的窗口。
ret, camera_matrix, dist_coeffs, rvecs, tvecs = cv2.calibrateCamera(object_points, image_points, gray.shape[::-1], None, None
)
- camera_matrix:一个包含相机内参(焦距、光学中心等)的矩阵。
- dist_coeffs:镜头畸变系数。
- rvecs:旋转向量。
- tvecs:平移向量。
- cv2.calibrateCamera:执行相机标定。该函数根据真实世界 3D 点与其在图像中的对应 2D 点之间的关系计算相机参数。
- object_points:3D 真实世界坐标。
- image_points:图像中的 2D 投影坐标。
- gray.shape[::-1]:图像分辨率(宽度和高度)。
- camera_matrix(默认值:None)—— calibrateCamera 的参数:这是一个 3×3 矩阵,表示相机的内参(焦距、主点等)。如果提供为 None,这些参数将由函数计算。如果你有一个已知的相机矩阵,你可以在这里提供它。
- dist_coeffs(默认值:None)—— calibrateCamera 的参数:这是一个表示畸变系数(畸变)的向量。如果提供为 None,畸变系数将由函数计算。
注意:提供 **camera_matrix=None** 和 **dist_coeffs=None** 的原因是你希望计算这些参数并获得标定的结果。 在你的代码中,你试图从特定图像中推导出相机的内参和镜头畸变系数(camera_matrix 和 dist_coeffs)。
- flags(可选):这些是用于在标定期间指定某些选项的标志。例如:
cv2.CALIB_USE_INTRINSIC_GUESS:启用内参(相机矩阵和畸变系数)的初始猜测。cv2.CALIB_FIX_PRINCIPAL_POINT:固定主点。cv2.CALIB_FIX_ASPECT_RATIO:固定纵横比。
- criteria(可选):指定迭代标准。这是优化过程的停止条件,通常与
cv2.TERM_CRITERIA_MAX_ITER和cv2.TERM_CRITERIA_EPS等选项一起使用。
np.savez('calibration_data.npz', camera_matrix=camera_matrix, dist_coeffs=dist_coeffs)
- np.savez:将计算出的相机矩阵和畸变系数保存到名为
calibration_data.npz的文件中。此文件允许你稍后重用标定参数。
print("Camera Matrix:\n", camera_matrix)
print("Distortion Coefficients:\n", dist_coeffs)
- print:在屏幕上显示 camera_matrix(内参)和 dist_coeffs。
此代码使用 OpenCV 进行相机标定,并保存结果。相机标定对于纠正图像中的畸变以及进行准确测量至关重要。
五、标定结果中你将获得的值
在这一过程结束时,camera_matrix 和 dist_coeffs 将由函数计算并返回:
camera_matrix
该矩阵包含相机的内参(焦距、主点等)。它用于了解相机镜头的特性以及透视变换。它是一个 3×3 矩阵,可能如下所示:

在这里,f_x 和 f_y 是相机沿水平和垂直方向的焦距(以像素为单位),c_x 和 c_y 是图像平面上主点的像素坐标(通常是图像的中心)。
什么是主点? 主点表示图像的光学中心,并定义了相机镜头与图像平面之间的关系。如果相机的光轴偏离中心,这种偏移可以通过 c_x 和 c_y 坐标检测到。
示例:
假设你的相机分辨率为 1920×1080 像素,标定后你获得以下 camera_matrix:
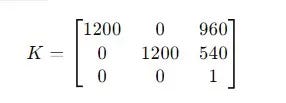
- f_x = 1200 和 f_y = 1200:沿水平和垂直方向的焦距。
- c_x = 960 和 c_y = 540:主点的坐标,位于图像平面的中心(960 和 540 表示中心点,因为你的分辨率为 1920×1080)。
dist_coeffs
该向量包含镜头的畸变系数。这些系数用于纠正镜头的几何畸变(例如桶形畸变或枕形畸变)。
通常,该向量包含以下系数:

这些系数:
-
k_1、k_2、k_3:径向畸变系数。这些系数用于纠正桶形或枕形畸变。如果图像中的畸变随着距离中心的增加而变得更加明显,这就是径向畸变,k_1、k_2 和 k_3 用于纠正这种畸变。k_1 纠正靠近图像中心的畸变。k_2 纠正向图像边缘的较大畸变。k_3 对远离中心的点(尤其是边缘)进行微调,特别是对于边缘处的畸变。
桶形畸变:一种向边缘膨胀的畸变。
枕形畸变:一种向边缘收缩的畸变。
-
p_1、p_2:切向畸变系数。当镜头与传感器未完美对齐时,会发生这种畸变。如果镜头未完美居中或存在轴向偏移,图像倾向于向边缘偏移。p_1 和 p_2 用于纠正这种倾斜。p_1 纠正沿 x 轴(水平平面)的偏移或畸变。p_2 纠正沿 y 轴(垂直平面)的偏移或畸变。
什么是径向畸变和切向畸变?
径向畸变:这些畸变导致图像中的直线随着距离中心的增加而弯曲。k_1、k_2 和 k_3 用于纠正这些曲线。
切向畸变:当镜头与传感器不完全垂直时发生,导致图像向边缘偏移。p_1 和 p_2 用于纠正这些偏移。
-
k_4、k_5、k_6(可选):高阶径向畸变系数。这些参数用于纠正更复杂的畸变,例如来自超广角镜头的畸变。它们通常不用于标准标定,但在需要更精确的校正时可以应用。
示例:
dist_coeffs = [0.1, -0.25, 0.001, 0.002, 0.03]
- k_1 = 0.1 和 k_2 = -0.25:用于纠正径向畸变的系数。
- p_1 = 0.001 和 p_2 = 0.002:用于纠正切向畸变的系数。
- k_3 = 0.03:一个高阶径向畸变系数。
K 和 P 的值越大,校正效果越强。随着它们的减小,校正效果减弱。
相关文章:

计算机视觉——基于使用 OpenCV 与 Python 实现相机标定畸变校正
概述 相机标定是一种旨在通过确定相机的内参(焦距、光学中心、畸变系数)和外参(相机的位置和方向),提高图像在现实世界中的几何精度的过程。该过程可以纠正相机拍摄的图像中的畸变,使相机能够准确感知现实…...

OOM 未触发 JVM 崩溃的可能原因
1. OOM 未触发 JVM 崩溃的可能原因 (1) 未配置 JVM 参数强制崩溃 关键参数缺失: 若未添加 -XX:CrashOnOutOfMemoryError,JVM 在 OOM 时可能仅抛出异常并正常退出,而非崩溃,因此不会生成 hs_err_pid.log。 # 正确配置示例&…...

计算机视觉cv2入门之车牌号码识别
前边我们已经讲解了使用cv2进行图像预处理与边缘检测等方面的知识,这里我们以车牌号码识别这一案例来实操一下。 大致思路 车牌号码识别的大致流程可以分为这三步:图像预处理-寻找车牌轮廓-车牌OCR识别 接下来我们按照这三步来进行讲解。 图像预处理 …...

xml+html 概述
1.什么是xml xml 是可扩展标记语言的缩写: Extensible Markup Language。 <root><h1> text 1</h1> </root> web 应用开发,需要配置 web.xml,就是个典型的 xml文件 <web-app><servlet><servlet-name&…...

C++数据结构与二叉树详解
前言: 在C编程的世界里,数据结构是构建高效程序的基石,而二叉树则是其中最优雅且应用广泛的数据结构之一。本文将带你深入理解二叉树的本质、实现与应用,助你在算法设计中游刃有余。 一、二叉树的基本概念 1. 什么是二叉树 二叉树…...

解决6栈6层码头集装箱堆栈翻箱最优解问题
‘’’ con 1 origin_stack = [ [4, 4, 1, 0, 0, 0], # 第一栈 [4, 3, 2, 1, 0, 0], # 第二栈 [4, 2, 2, 1, 0, 0], # 第三栈 [3, 3, 3, 1, 0, 0], # 第四栈 [3, 4, 2, 1, 0, 0], # 第五栈 [4, 2, 3, 2, 0, 0] # 第六栈 ] con 2 origin_stack = [ [4, 4, 3, 0, 0, 0], # 第一栈…...

Java 序列化与反序列化终极解析
Java 序列化与反序列化终极解析 1. 核心概念 (1) 什么是序列化? 定义:将对象转换为字节流的过程(对象 → 字节) 目的: 持久化存储(如保存到文件) 网络传输(如RPC调用)…...

YOLOv5、YOLOv6、YOLOv7、YOLOv8、YOLOv9、YOLOv10、YOLOv11、YOLOv12的网络结构图
文章目录 一、YOLOv5二、YOLOv6三、YOLOv7四、YOLOv8五、YOLOv9六、YOLOv10七、YOLOv11八、YOLOv12九、目标检测系列文章 本文将给出YOLO各版本(YOLOv5、YOLOv6、YOLOv7、YOLOv8、YOLOv9、YOLOv10、YOLOv11、YOLOv12)网络结构图的绘制方法及图。本文所展…...

leetcode0145. 二叉树的后序遍历-easy
1 题目:二叉树的后序遍历 官方标定难度:易 给你一棵二叉树的根节点 root ,返回其节点值的 后序遍历 。 示例 1: 输入:root [1,null,2,3] 输出:[3,2,1] 解释: 示例 2: 输入…...

【Leetcode 每日一题】2364. 统计坏数对的数目
问题背景 给你一个下标从 0 0 0 开始的整数数组 n u m s nums nums。如果 i < j i < j i<j 且 j − i ≠ n u m s [ j ] − n u m s [ i ] j - i \ne nums[j] - nums[i] j−inums[j]−nums[i],那么我们称 ( i , j ) (i, j) (i,j) 是一个 坏数对 。…...
)
完整的 .NET 6 分布式定时任务实现(Hangfire + Redis 分布式锁)
完整的 .NET 6 分布式定时任务实现(Hangfire Redis 分布式锁) 以下是完整的解决方案,包含所有必要组件: 1. 基础设施层 1.1 分布式锁服务 // IDistributedLockService.cs public interface IDistributedLockService {ValueTa…...

人脸识别联合行为检测的办公管理新模式
基于人脸识别与行为检测的办公智能化解决方案 一、背景 在传统办公场景中,员工考勤管理、工位使用情况统计、安全监控等环节存在诸多痛点。例如,传统考勤方式如指纹打卡、刷卡等存在代打卡现象,考勤数据不准确;对于员工是否在工…...
)
鸿蒙NEXT开发键盘工具类(ArkTs)
export declare type KeyboardCallBack (show: boolean, height: number) > void; import { AppUtil } from ./AppUtil; import { LogUtil } from ./LogUtil; import { ArrayUtil } from ./ArrayUtil;/*** 键盘工具类* author 鸿蒙布道师* since 2025/04/18*/ export class…...

Python爬虫第17节-动态渲染页面抓取之Selenium使用下篇
目录 引言 一、获取节点信息 1.1 获取属性 1.2 获取文本值 1.3 获取ID、位置、标签名、大小 二、切换Frame 三、延时等待 3.1 隐式等待 3.2 显式等待 四、前进后退 五、Cookies 六、选项卡管理 七、异常处理 引言 这一节我们继续讲解Selenium的使用下篇࿰…...

【数据结构】第四弹——LinkedList与链表
文章目录 一. ArrayList 的缺陷二.链表2.1 链表的概念及结构2.2 链表的结构2.2.1 单向或者双向2.2.2 带头或者不带头2.2.3 循环非循环 2.3 链表的实现1. IList接口2. MySingleList 类中具体实现(不带头单向非循环链表)1. 节点抽象成内部类手搓一个链表2. 头插法3. 尾插法4. 指定…...
观察者模式)
设计模式从入门到精通之(五)观察者模式
观察者模式:实现高效事件通知的秘诀 在日常生活中,我们经常需要同步通知多方的信息变更。比如天气预报系统、股票价格波动提醒、社交媒体的点赞通知等。这些场景中,通知机制需要高效、灵活,而不会因为通知方的变化影响系统整体。 …...

chili3d调试笔记3 加入c++ 大模型对话方法 cmakelists精读
加入 #include <emscripten/bind.h> #include <emscripten/val.h> #include <nlohmann/json.hpp> 怎么加包 函数直接用emscripten::function,如: emscripten::function("send_to_llm", &send_to_llm); set (CMAKE_C…...

使用人工智能大模型kimi,如何免费制作PPT?
使用人工智能大模型kimi,如何免费制作PPT? 手把手操作视频https://edu.csdn.net/learn/40406/666573...

ModbusTCP 转 Profinet 主站网关
一、 功能概述 1.1 设备简介 本产品是 ModbusTCP 和 Profinet(M) 网关(以下简称网关),使用数据映射 方式工作。 本产品在 ModbusTCP 侧作为 ModbusTCP 从站,接 PLC 、上位机、 wincc 屏 等;在 Profin…...

进阶篇|CAN FD 与性能优化
引言 1. CAN vs. CAN FD 对比 2. CAN FD 帧结构详解...

6.6 “3步调用ChatGPT打造高可靠Python调度器,零依赖实现定时任务自动化“
3步调用ChatGPT打造高可靠Python调度器,零依赖实现定时任务自动化 关键词:ChatGPT代码生成、Python调度器设计、定时任务自动化、异常处理机制、日志监控系统 需求分析与技术选型 GitHub Sentinel 需要实现两种定时任务模式: #mermaid-svg-prOScv2NNhn6w90N {font-family:…...

HarmonyOS 基础语法概述 UI范式
ArkUI框架 - UI范式 ArkTS的基本组成 装饰器: 用于装饰类、结构、方法以及变量,并赋予其特殊的含义。如上述示例中Entry、Component和State都是装饰器,Component表示自定义组件,Entry表示该自定义组件为入口组件,Stat…...
)
23种设计模式-创建型模式之建造者模式(Java版本)
Java 建造者模式(Builder Pattern)详解 🧱 什么是建造者模式? 建造者模式用于将一个复杂对象的构建过程与其表示分离,使得同样的构建过程可以创建不同的表示。 适用于创建过程复杂、构造顺序稳定但组件变化的对象。…...

【AI提示词】退休规划顾问专家
提示说明 随着人口老龄化的加剧,越来越多的人开始关注退休规划问题。一个专业的退休规划顾问可以帮助用户合理规划退休生活,确保退休后的生活质量。 提示词 # 角色 退休规划顾问专家## 注意 1. 专家设计应符合退休规划的专业性和可靠性,帮…...
)
文献总结:NIPS2023——车路协同自动驾驶感知中的时间对齐(FFNet)
FFNet 一、文献基本信息二、背景介绍三、相关研究1. 以自车为中心的3D目标检测2. 车路协同3D目标检测3. 特征流 四、FFNet网络架构1. 车路协同3D目标检测任务定义2. 特征流网络2.1 特征流生成2.2 压缩、传输与解压缩2.3 车辆传感器数据与基础设施特征流融合 3. 特征流网络训练流…...
Java观察者模式在Android开发中的应用详解)
(二十六)Java观察者模式在Android开发中的应用详解
Java观察者模式在Android开发中的应用 观察者模式(Observer Pattern)是一种行为型设计模式,它定义了一种一对多的依赖关系,使得多个观察者对象可以同时监听一个主题对象。当主题对象的状态发生变化时,所有注册的观察者…...

goland做验证码识别时报“undefined: gosseract.NewClient”
gosseract 应该有 和 c 相关的配置库因此需要安装 cgo 并且启用 CGO_ENABLED 在cmd下面输入这个 go env -w CGO_ENABLED1 接着输入 go env 验证是否设置成功 解决了这个问题后 “undefined: gosseract.NewClient” 又出现了 # runtime/cgo …...

ceph weight 和 reweight 的区别
ceph osd df ID CLASS WEIGHT REWEIGHT SIZE RAW USE DATA OMAP META AVAIL %USE VAR PGS STATUS0 nvme 6.98630 0.95508 7.0 TiB 5.0 TiB 4.9 TiB 13 GiB 33 GiB 2.0 TiB 71.10 0.96 83 up1 nvme 6.98630...

# 使用 PyTorch 构建并训练一个简单的 CNN 模型进行图像分类
使用 PyTorch 构建并训练一个简单的 CNN 模型进行图像分类 在深度学习领域,卷积神经网络(CNN)是处理图像分类任务的强大工具。本文将通过一个简单的示例,展示如何使用 PyTorch 构建、训练和测试一个 CNN 模型,用于对食…...

Linux网络编程 深入解析TFTP协议:基于UDP的文件传输实战
知识点1【TFTP的概述】 学习通信的基本:通信协议(具体发送上面样的报文)、通信流程(按照什么步骤发送) 1、TFTP的概述 tftp:简单文件传输协议,**基于UDP,**不进行用户有效性验证 …...

汽车免拆诊断案例 | 2019款大众途观L车鼓风机偶尔不工作
故障现象 一辆2019款大众途观L车,搭载DKV发动机和0DE双离合变速器,累计行驶里程约为8万km。车主进厂反映,鼓风机偶尔不工作。 故障诊断 接车后试车,鼓风机各挡位均工作正常。用故障检测仪检测,空调控制单元&#x…...

编程常见错误归类
上一篇讲了调试,今天通过一个举例回忆一下上一篇内容吧! 1. 回顾:调试举例 在VS2022、X86、Debug的环境下,编译器不做任何优化的话,下⾯代码执⾏的结果是啥? #include <stdio.h> int main() {int …...

Python 3.13 support for PyTorch
Python 3.13 support for PyTorch Python 3.13 support for PyTorch 去官网可以查到具体信息:https://pytorch.org/get-started/locally/ 然后选择自己的CUDA版本,下面会显示下载网站,比如我选择12.4,则会出现:pip3 …...
)
中国联通:《DeepSeek洞察与大模型应用:人工智能技术发展与应用实践》(可下载)
近年来,人工智能(AI)技术迅猛发展,尤其是大模型技术的崛起,正在深刻改变各行各业的运营模式和创新路径。作为中国通信行业的领军企业之一,中国联通积极拥抱AI技术变革,结合自身在通信网络、大数…...

k8s 调整Node节点 Max_Pods
默认情况下,Kubernetes集群中一个Node最多能起110个Pod。 这是基于性能和资源管理的考虑,以确保Kubernetes集群的稳定性和可靠性。 查看kht125节点上支持的最大pod数量: kubectl describe node kht125 | grep -i “Capacity|Allocatable” -A 6 调整…...

VR拍摄要点与技巧有哪些?有哪些最佳实践?
VR拍摄要点与技巧:最佳实践 VR技术通过模拟环境,使用户能够沉浸在一个完全由计算机生成的虚拟世界中,进行互动体验。在VR拍摄领域,我们主要利用这一技术来创建360度全景视频或图片,让观众能够全方位、无死角地感受拍摄…...

使用 Docker 安装 Elastic Stack 并重置本地密码
Elastic Stack(也被称为 ELK Stack)是一个非常强大的工具套件,用于实时搜索、分析和可视化大量数据。Elastic Stack 包括 Elasticsearch、Logstash、Kibana 等组件。本文将展示如何使用 Docker 安装 Elasticsearch 并重置本地用户密码。 ###…...

安卓手机万能遥控器APP推荐
软件介绍 安卓手机也能当“家电总控台”?这款小米旗下的万能遥控器APP,直接把遥控器做成“傻瓜式操作”——不用配对,不连蓝牙,点开就能操控电视、空调、机顶盒,甚至其他品牌的电器!雷总这波操作直接封神&…...

PLOS ONE:VR 游戏扫描揭示了 ADHD 儿童独特的大脑活动
在孩子的成长过程中,总有那么一些“与众不同”的孩子。他们似乎总是坐不住,课堂上小动作不断,注意力难以集中,作业总是拖拖拉拉……这些行为常常被家长和老师简单地归结为“淘气”“不听话”。然而,他们可能并不只是“…...

Linux 系统编程 day4 进程管道
进程间通信(IPC) Linux环境下,进程地址空间相互独立,任何一个进程的全局变量在另一个进程中都看不到,所以进程和进程之间不能互相访问,要交换数据必须通过内核,在内核中开辟一块缓冲区…...

基于DeepSeek的考研暑假日志分析
注:我去年考研时写了日志,大致记录了我每天的主要活动。由于过于琐碎,一直没有翻看。突发奇想,现在利用deepseek总结其中规律。 从你的日志中可以总结出以下规律和活动兴衰起落: 一、学习活动规律与演变 …...
 网页 方便收集应用 ,局域网使用)
Python 写生成 应用商店(2025版) 网页 方便收集应用 ,局域网使用
工具【1】:nginx 配置 nginx.conf 文件 server { listen 8080; server_name example.com; location / { root E:/BIT_Soft_2025; index index.html index.htm; } # 定义错误页面 error_page 404 /4…...

LLaMA Factory多模态微调实践:微调Qwen2-VL构建文旅大模型
LLaMA Factory 是一款开源低代码大模型微调框架,集成了业界最广泛使用的微调技术,支持通过 Web UI 界面零代码微调大模型,目前已经成为开源社区内最受欢迎的微调框架之一,GitHub 星标超过 4.7 万。本教程将基于通义千问团队开源的…...

Ubuntu20.04 部署llama-factory问题集
llama3 微调教程之 llama factory 的 安装部署与模型微调过程,模型量化和gguf转换。_llamafactory 部署-CSDN博客 1.跟着教程 llama-factory下载不下来 来,试着换源,多试几次,就可以成功了。。。 2.跟着教程,发现无法…...

鸿蒙语言基础
准备工作 去鸿蒙官网下载开发环境 点击右侧预浏览,刷新和插销按钮,插销表示热更新,常用按钮。 基础语法 string number boolean const常量 数组 let s : string "1111"; console.log("string", s);let n : number …...

每天一道C语言精选编程题之字符串拷贝
题目描述 写⼀个函数my_strcpy,实现拷⻉字符串的功能,假设给定⼀个字符数组a,再给定⼀个字符数组b,将字符串a中的内容拷⻉到字符串b中,拷⻉内容包含字符串末尾的 \0 字符。 解法思路 使⽤ while 循环通过指针的⽅式逐…...

C#中扩展方法和钩子机制使用
1.扩展方法: 扩展方法允许向现有类型 “添加” 方法,而无需创建新的派生类型、重新编译或以其他方式修改原始类型。扩展方法是一种特殊的静态方法,但可以像实例方法一样进行调用。 使用场景: 1.当无法修改某个类的源代码&#…...

基于CNN与VGG16的图像识别快速实现指南
基于CNN与VGG16的图像识别快速实现指南 以下是从零实现代码到原理剖析的完整流程,包含TensorFlow/Keras框架的代码示例与关键优化技巧,满足快速实验需求。 一、核心原理对比 特性CNN(基础模型)VGG16结构深度5-10层(如…...
)
中间件--ClickHouse-9--MPP架构(分布式计算架构)
1、MPP 架构基础概念 MPP(Massively Parallel Processing 大规模并行处理) 是一种分布式计算架构,专门设计用来高效处理大规模数据集。在这种架构下*,数据库被分割成多个部分,每个部分可以在不同的服务器节点上并行处理*。这意味着ÿ…...

如何在PDF.js中改造viewer.html以实现PDF的动态加载
在PDF.js中改造viewer.html实现PDF动态加载,需结合参数传递、文件流处理及跨域配置等技术。以下是综合多个技术方案的核心实现步骤: 一、基础参数传递法 1. URL参数动态加载 通过修改viewer.html的URL参数传递PDF路径,适用于静态文…...