STM32+dht11+rc522+jq8400的简单使用
1.dht11的使用
硬件:3v3,gnd,data数据线接一个gpio,三根线即可
软件:
①dht11.c
#include "dht11.h"
#include "delay.h"
#include "stdbool.h"static STRUCT_DHT11_TYPEDEF dht11;/* 定义DQ端口 可以直接修改该宏定义更改DQ端口引脚定义 */
#define DHT11_GPIO_RCLK RCC_APB2Periph_GPIOA
#define DHT11_GPIO_PORT GPIOA
#define DHT11_GPIO_PIN GPIO_Pin_2#define DHT11_DQ(x) GPIO_WriteBit(DHT11_GPIO_PORT, DHT11_GPIO_PIN, (BitAction)x)
#define DHT11_DQ_STATUS GPIO_ReadInputDataBit(DHT11_GPIO_PORT, DHT11_GPIO_PIN)/*** @brief 配置DQ引脚为输入/输出模式* @param out true-输出 false-输入* @retval 无*/
static void dht11_set_inout(bool out)
{GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd(DHT11_GPIO_RCLK, ENABLE); /* 使能端口时钟 */if(out == true) {GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; /* 推挽输出 */}else {GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; /* 上拉输入 */}GPIO_InitStructure.GPIO_Pin = DHT11_GPIO_PIN; /* 端口配置 */GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(DHT11_GPIO_PORT, &GPIO_InitStructure); /* 初始化IO口 */
}/*** @brief 初始化DHT11的引脚* @param 无* @retval 无*/
static void dht11_gpio_config(void)
{GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd(DHT11_GPIO_RCLK, ENABLE); /* 使能端口时钟 */GPIO_InitStructure.GPIO_Pin = DHT11_GPIO_PIN; /* 端口配置 */GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; /* 推挽输出 */GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(DHT11_GPIO_PORT, &GPIO_InitStructure); /* 初始化IO口 */
}/*** @brief 初始化DHT11的结构体* @param 无* @retval 无*/
static void dht11_struct_config(void)
{dht11.temperature = 0.f;dht11.temperature_offset = -0.f;dht11.humidity = 0.f;dht11.humidity_offset = -0.f;
}/* 功能:向DHT11发送开始信号 */
static void dht11_start(void)
{dht11_set_inout(true); /* 配置为输出模式 */DHT11_DQ(0); /* 拉低DQ引脚 */delay_ms(20); /* 拉低至少18ms */DHT11_DQ(1); /* DQ = 1 */delay_us(30); /* 主机拉高20~40us */
}/** 功能: 等待DHT11的回应* 返回值:* 返回1:未检测到DHT11的存在* 返回0:存在*/
static unsigned char dht11_waitAck(void)
{ unsigned char retry = 0;dht11_set_inout(false); /* 配置为输入模式 */while(!DHT11_DQ_STATUS && retry < 100) {/* DHT11会拉低80us -- 通知主机传感器正常 */retry ++;delay_us(1);}if(retry >= 100) return 1;else retry = 0;while(DHT11_DQ_STATUS && retry < 100) {/* DHT11会拉高80us -- 通知主机准备接收数据 */retry ++;delay_us(1);}if(retry >= 100) return 1;return 0;
}/** 功能:从DHT11读取一个位* 返回值:* 1 读取数据为1* 0 读取数据为0*/
static unsigned char dht11_readBit(void)
{unsigned char retry = 0;dht11_set_inout(false);while(DHT11_DQ_STATUS && retry < 100) { /* 拉高延时准备输出 -- 等待变为低电平 */retry ++;delay_us(1);}retry = 0;while(!DHT11_DQ_STATUS && retry < 100) { /* 先拉低50us -- 等待变为高电平 */retry ++;delay_us(1);}delay_us(30); /* 用于判断高电平持续时间,即接收数据为1或0 */if(DHT11_DQ_STATUS) return 1;return 0;
}/** 功能:从DHT11读取一个字节* 返回值:读到的数据*/
static unsigned char dht11_readByte(void)
{unsigned char i,data=0;for(i=0;i<8;i++) {data <<= 1; data |= dht11_readBit();}return data;
}/*** @brief 初始化DHT11* @param 无* @retval 无*/
void dht11_init(void)
{dht11_struct_config();dht11_gpio_config();
}/*** @brief DHT11数据采集函数* @param 无* @retval 无* @note 函数执行的基准时间10us*/
void dht11_measure(void *priv)
{unsigned char i=0;unsigned char buf[5];dht11_start();if( !dht11_waitAck() ) {/* 读取数据 数据格式为 湿度整数 + 湿度小数 + 温度整数 + 温度小数 + 校验和(前四位之和) */for( i=0;i<5;i++)buf[i] = dht11_readByte();if((buf[0] + buf[1] + buf[2] + buf[3]) == buf[4]) { /* 校验接收到的数据是否正确 */dht11.humidity = buf[0] + buf[1] * 0.1f;dht11.temperature = buf[2] + buf[3] * 0.1f;}}
}/*** @brief 获取dht11采集的温度数据* @param 无* @retval 温度数据 0℃-50℃*/
float dht11_get_temperature(void)
{float temperature = dht11.temperature + dht11.temperature_offset;if(temperature > 50.f) { temperature = 50.f; }if(temperature < 0.f) { temperature = 0.f; }return (temperature);
}/*** @brief 获取dht11采集的湿度数据* @param 无* @retval 湿度数据 20%RH-90%RH*/
float dht11_get_humidity(void)
{float humidity = dht11.humidity + dht11.humidity_offset;if(humidity > 90.f) { humidity = 90.f; }if(humidity < 20.f) { humidity = 20.f; }return (humidity);
}/*** @brief 设置dht11的温度补偿值* @param offset - 补偿值* @retval 无*/
void dht11_set_temperature_offset(float offset)
{dht11.temperature_offset = offset;
}/*** @brief 设置dht11的湿度补偿值* @param offset - 补偿值* @retval 无*/
void dht11_set_humidity_offset(float offset)
{dht11.humidity_offset = offset;
}② dht11.h
#ifndef __DHT11_H
#define __DHT11_H#include "stm32f10x.h"typedef struct {float temperature; /* 获取的温度数据 范围:0~50℃ */float temperature_offset; /* 温度补偿值 */float humidity; /* 获取的湿度数据 范围:20%~90% */float humidity_offset; /* 湿度补偿值 */
} STRUCT_DHT11_TYPEDEF;/* ------------------------- DHT11操作函数 ------------------------- */
void dht11_init (void); /* 初始化DHT11 */
void dht11_measure (void *priv); /* 读取温湿度 */
float dht11_get_temperature (void); /* 获取dht11采集的温度数据 */
float dht11_get_humidity (void); /* 获取dht11采集的湿度数据 */
void dht11_set_temperature_offset(float offset); /* 设置dht11的温度补偿值 */
void dht11_set_humidity_offset (float offset); /* 设置dht11的湿度补偿值 */#endif③main.c
int main(void)
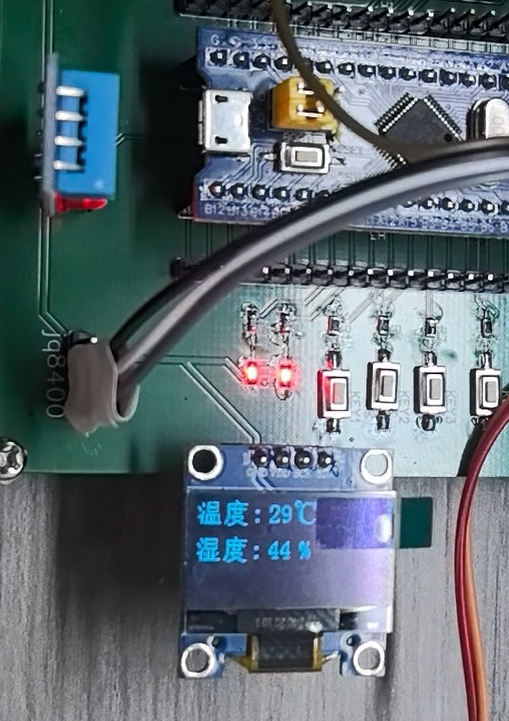
{dht11_init(); //温湿度传感器初始化while (1){ dht11_measure(NULL);//dht11wd = dht11_get_temperature();//获取温度sd = dht11_get_humidity(); //获取湿度OLED_ShowCHinese(0, 0, 9); //温OLED_ShowCHinese(18, 0, 10); //度 OLED_ShowString(36,0,":",16); //:OLED_ShowNum(48,0,wd,2,16);OLED_ShowCHinese(66, 0, 11); //℃ OLED_ShowCHinese(0, 3, 36); //湿OLED_ShowCHinese(18, 3, 10); //度 OLED_ShowString(36,3,":",16); //:OLED_ShowNum(48,3,sd,2,16);OLED_ShowString(70,3,"%",16); //% }
}实现结果如下所示:
2. rc522的使用
硬件:接线定义如下所示,5根线加上3.3v和gnd总共七根线,多出来的一个引脚可不接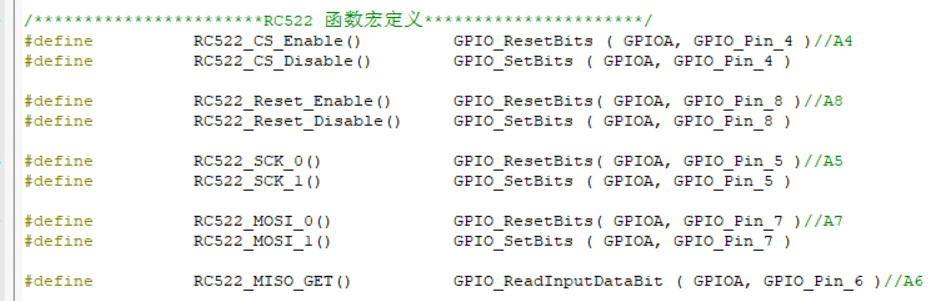
软件:
①rc522.c
#include "rc522.h"
#include "delay.h"
#include "usart.h"
#include <string.h>
#include "oled.h"
#include "led.h"
#include "jq8400.h" // M1卡分为16个扇区,每个扇区由四个块(块0、块1、块2、块3)组成
// 将16个扇区的64个块按绝对地址编号为:0~63
// 第0个扇区的块0(即绝对地址0块),用于存放厂商代码,已经固化不可更改
// 每个扇区的块0、块1、块2为数据块,可用于存放数据
// 每个扇区的块3为控制块(绝对地址为:块3、块7、块11.....)包括密码A,存取控制、密码B等/*全局变量*/
unsigned char CT[2];//卡类型
unsigned char SN[4]; //卡号(低字节在前,高字节在后)
unsigned char RFID[16]; //存放RFID
unsigned char lxl_bit=0;
unsigned char card1_bit=0;
unsigned char card2_bit=0;
unsigned char card3_bit=0;
unsigned char card4_bit=0;
unsigned char total=0;
unsigned char lxl[4]={196,58,104,217};
unsigned char card_1[4]={83,106,11,1};
unsigned char card_2[4]={208,121,31,57};
unsigned char card_3[4]={176,177,143,165};
unsigned char card_4[4]={5,158,10,136};
u8 KEY[6]={0xff,0xff,0xff,0xff,0xff,0xff};
u8 AUDIO_OPEN[6] = {0xAA, 0x07, 0x02, 0x00, 0x09, 0xBC};
unsigned char RFID1[16]={0x00,0x00,0x00,0x00,0x00,0x00,0xff,0x07,0x80,0x29,0xff,0xff,0xff,0xff,0xff,0xff};
/*函数声明*/
unsigned char status;
unsigned char s=0x08;
unsigned char ShowON; #define RC522_DELAY() delay_us( 20 )//ID
char ss[255];
//char data[16];unsigned char snr, buf[16], TagType[2], SelectedSnr[4], DefaultKey[6] = {0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF};
unsigned char buf1[16];
unsigned char buf2[16];
int a = 1200;
char OK_status;void RC522_Handel(void)
{ u8 num[9];u8 i;
// status = PcdRequest(PICC_REQALL,CT);//寻卡// printf("\r\nstatus>>>>>>%d\r\n", status);if(status==MI_OK)//寻卡成功{ //printf("\r\n寻卡成功\r\n");status=MI_ERR;status = PcdAnticoll(SN);//防冲撞//这里放你刷完卡想执行的命令 }}void RC522_Init ( void )
{SPI1_Init();RC522_Reset_Disable();RC522_CS_Disable();PcdReset ();M500PcdConfigISOType ( 'A' );//设置工作方式}void SPI1_Init(void)
{GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB, ENABLE );//PORTB时钟使能 // CSGPIO_InitStructure.GPIO_Pin = GPIO_Pin_4; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHzGPIO_Init(GPIOA, &GPIO_InitStructure); //根据设定参数初始化PB12// SCKGPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHzGPIO_Init(GPIOA, &GPIO_InitStructure);// MISOGPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //推挽输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHzGPIO_Init(GPIOA, &GPIO_InitStructure);// MOSIGPIO_InitStructure.GPIO_Pin = GPIO_Pin_7; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHzGPIO_Init(GPIOA, &GPIO_InitStructure);// RSTGPIO_InitStructure.GPIO_Pin = GPIO_Pin_8; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHzGPIO_Init(GPIOA, &GPIO_InitStructure);}/** 函数名:SPI_RC522_SendByte* 描述 :向RC522发送1 Byte 数据* 输入 :byte,要发送的数据* 返回 : RC522返回的数据* 调用 :内部调用*/
void SPI_RC522_SendByte ( u8 byte )
{u8 counter;for(counter=0;counter<8;counter++){ if ( byte & 0x80 )RC522_MOSI_1 ();else RC522_MOSI_0 ();// delay_us ( 3 );RC522_DELAY();RC522_SCK_0 ();// delay_us ( 1 );
// delay_us ( 3 );RC522_DELAY();RC522_SCK_1();// delay_us ( 3 );RC522_DELAY();byte <<= 1; } }/** 函数名:SPI_RC522_ReadByte* 描述 :从RC522发送1 Byte 数据* 输入 :无* 返回 : RC522返回的数据* 调用 :内部调用*/
u8 SPI_RC522_ReadByte ( void )
{u8 counter;u8 SPI_Data;for(counter=0;counter<8;counter++){SPI_Data <<= 1;RC522_SCK_0 ();// delay_us ( 3 );RC522_DELAY();if ( RC522_MISO_GET() == 1)SPI_Data |= 0x01;// delay_us ( 2 );
// delay_us ( 3 );RC522_DELAY();RC522_SCK_1 ();// delay_us ( 3 );RC522_DELAY();}// printf("****%c****",SPI_Data);return SPI_Data;
}/** 函数名:ReadRawRC* 描述 :读RC522寄存器* 输入 :ucAddress,寄存器地址* 返回 : 寄存器的当前值* 调用 :内部调用*/
u8 ReadRawRC ( u8 ucAddress )
{u8 ucAddr, ucReturn;ucAddr = ( ( ucAddress << 1 ) & 0x7E ) | 0x80;RC522_CS_Enable();SPI_RC522_SendByte ( ucAddr );ucReturn = SPI_RC522_ReadByte ();RC522_CS_Disable();return ucReturn;
}/** 函数名:WriteRawRC* 描述 :写RC522寄存器* 输入 :ucAddress,寄存器地址* ucValue,写入寄存器的值* 返回 : 无* 调用 :内部调用*/
void WriteRawRC ( u8 ucAddress, u8 ucValue )
{ u8 ucAddr;ucAddr = ( ucAddress << 1 ) & 0x7E;RC522_CS_Enable();SPI_RC522_SendByte ( ucAddr );SPI_RC522_SendByte ( ucValue );RC522_CS_Disable();
}/** 函数名:SetBitMask* 描述 :对RC522寄存器置位* 输入 :ucReg,寄存器地址* ucMask,置位值* 返回 : 无* 调用 :内部调用*/
void SetBitMask ( u8 ucReg, u8 ucMask )
{u8 ucTemp;ucTemp = ReadRawRC ( ucReg );WriteRawRC ( ucReg, ucTemp | ucMask ); // set bit mask}/** 函数名:ClearBitMask* 描述 :对RC522寄存器清位* 输入 :ucReg,寄存器地址* ucMask,清位值* 返回 : 无* 调用 :内部调用*/
void ClearBitMask ( u8 ucReg, u8 ucMask )
{u8 ucTemp;ucTemp = ReadRawRC ( ucReg );WriteRawRC ( ucReg, ucTemp & ( ~ ucMask) ); // clear bit mask}/** 函数名:PcdAntennaOn* 描述 :开启天线 * 输入 :无* 返回 : 无* 调用 :内部调用*/
void PcdAntennaOn ( void )
{u8 uc;uc = ReadRawRC ( TxControlReg );if ( ! ( uc & 0x03 ) )SetBitMask(TxControlReg, 0x03);}/** 函数名:PcdAntennaOff* 描述 :开启天线 * 输入 :无* 返回 : 无* 调用 :内部调用*/
void PcdAntennaOff ( void )
{ClearBitMask ( TxControlReg, 0x03 );}/** 函数名:PcdRese* 描述 :复位RC522 * 输入 :无* 返回 : 无* 调用 :外部调用*/
void PcdReset ( void )
{RC522_Reset_Disable();delay_us ( 1 );RC522_Reset_Enable();delay_us ( 1 );RC522_Reset_Disable();delay_us ( 1 );WriteRawRC ( CommandReg, 0x0f );while ( ReadRawRC ( CommandReg ) & 0x10 );delay_us ( 1 );WriteRawRC ( ModeReg, 0x3D ); //定义发送和接收常用模式 和Mifare卡通讯,CRC初始值0x6363WriteRawRC ( TReloadRegL, 30 ); //16位定时器低位 WriteRawRC ( TReloadRegH, 0 ); //16位定时器高位WriteRawRC ( TModeReg, 0x8D ); //定义内部定时器的设置WriteRawRC ( TPrescalerReg, 0x3E ); //设置定时器分频系数WriteRawRC ( TxAutoReg, 0x40 ); //调制发送信号为100%ASK }/** 函数名:M500PcdConfigISOType* 描述 :设置RC522的工作方式* 输入 :ucType,工作方式* 返回 : 无* 调用 :外部调用*/
void M500PcdConfigISOType ( u8 ucType )
{if ( ucType == 'A') //ISO14443_A{ClearBitMask ( Status2Reg, 0x08 );WriteRawRC ( ModeReg, 0x3D ); //3FWriteRawRC ( RxSelReg, 0x86 ); //84WriteRawRC( RFCfgReg, 0x7F ); //4FWriteRawRC( TReloadRegL, 30 ); //tmoLengthWriteRawRC ( TReloadRegH, 0 ); //TReloadVal = 'h6a =tmoLength(dec) WriteRawRC ( TModeReg, 0x8D );WriteRawRC ( TPrescalerReg, 0x3E );delay_us ( 2 );PcdAntennaOn ( ); //开天线}}/** 函数名:PcdComMF522* 描述 :通过RC522和ISO14443卡通讯* 输入 :ucCommand,RC522命令字* pInData,通过RC522发送到卡片的数据* ucInLenByte,发送数据的字节长度* pOutData,接收到的卡片返回数据* pOutLenBit,返回数据的位长度* 返回 : 状态值* = MI_OK,成功* 调用 :内部调用*/
char PcdComMF522 ( u8 ucCommand, u8 * pInData, u8 ucInLenByte, u8 * pOutData, u32 * pOutLenBit )
{char cStatus = MI_ERR;u8 ucIrqEn = 0x00;u8 ucWaitFor = 0x00;u8 ucLastBits;u8 ucN;u32 ul;switch ( ucCommand ){case PCD_AUTHENT: //Mifare认证ucIrqEn = 0x12; //允许错误中断请求ErrIEn 允许空闲中断IdleIEnucWaitFor = 0x10; //认证寻卡等待时候 查询空闲中断标志位break;case PCD_TRANSCEIVE: //接收发送 发送接收ucIrqEn = 0x77; //允许TxIEn RxIEn IdleIEn LoAlertIEn ErrIEn TimerIEnucWaitFor = 0x30; //寻卡等待时候 查询接收中断标志位与 空闲中断标志位break;default:break;}WriteRawRC ( ComIEnReg, ucIrqEn | 0x80 ); //IRqInv置位管脚IRQ与Status1Reg的IRq位的值相反 ClearBitMask ( ComIrqReg, 0x80 ); //Set1该位清零时,CommIRqReg的屏蔽位清零WriteRawRC ( CommandReg, PCD_IDLE ); //写空闲命令SetBitMask ( FIFOLevelReg, 0x80 ); //置位FlushBuffer清除内部FIFO的读和写指针以及ErrReg的BufferOvfl标志位被清除for ( ul = 0; ul < ucInLenByte; ul ++ )WriteRawRC ( FIFODataReg, pInData [ ul ] ); //写数据进FIFOdataWriteRawRC ( CommandReg, ucCommand ); //写命令if ( ucCommand == PCD_TRANSCEIVE )SetBitMask(BitFramingReg,0x80); //StartSend置位启动数据发送 该位与收发命令使用时才有效ul = 1000;//根据时钟频率调整,操作M1卡最大等待时间25msdo //认证 与寻卡等待时间 {ucN = ReadRawRC ( ComIrqReg ); //查询事件中断ul --;} while ( ( ul != 0 ) && ( ! ( ucN & 0x01 ) ) && ( ! ( ucN & ucWaitFor ) ) ); //退出条件i=0,定时器中断,与写空闲命令ClearBitMask ( BitFramingReg, 0x80 ); //清理允许StartSend位if ( ul != 0 ){if ( ! (( ReadRawRC ( ErrorReg ) & 0x1B )) ) //读错误标志寄存器BufferOfI CollErr ParityErr ProtocolErr{cStatus = MI_OK;if ( ucN & ucIrqEn & 0x01 ) //是否发生定时器中断cStatus = MI_NOTAGERR; if ( ucCommand == PCD_TRANSCEIVE ){ucN = ReadRawRC ( FIFOLevelReg ); //读FIFO中保存的字节数ucLastBits = ReadRawRC ( ControlReg ) & 0x07; //最后接收到得字节的有效位数if ( ucLastBits )* pOutLenBit = ( ucN - 1 ) * 8 + ucLastBits; //N个字节数减去1(最后一个字节)+最后一位的位数 读取到的数据总位数else* pOutLenBit = ucN * 8; //最后接收到的字节整个字节有效if ( ucN == 0 ) ucN = 1; if ( ucN > MAXRLEN )ucN = MAXRLEN; for ( ul = 0; ul < ucN; ul ++ )pOutData [ ul ] = ReadRawRC ( FIFODataReg ); } }elsecStatus = MI_ERR;
// printf(ErrorReg);}SetBitMask ( ControlReg, 0x80 ); // stop timer nowWriteRawRC ( CommandReg, PCD_IDLE ); return cStatus;}/** 函数名:PcdRequest* 描述 :寻卡* 输入 :ucReq_code,寻卡方式* = 0x52,寻感应区内所有符合14443A标准的卡* = 0x26,寻未进入休眠状态的卡* pTagType,卡片类型代码* = 0x4400,Mifare_UltraLight* = 0x0400,Mifare_One(S50)* = 0x0200,Mifare_One(S70)* = 0x0800,Mifare_Pro(X))* = 0x4403,Mifare_DESFire* 返回 : 状态值* = MI_OK,成功* 调用 :外部调用*/
char PcdRequest ( u8 ucReq_code, u8 * pTagType )
{char cStatus; u8 ucComMF522Buf [ MAXRLEN ]; u32 ulLen;ClearBitMask ( Status2Reg, 0x08 ); //清理指示MIFARECyptol单元接通以及所有卡的数据通信被加密的情况WriteRawRC ( BitFramingReg, 0x07 ); // 发送的最后一个字节的 七位SetBitMask ( TxControlReg, 0x03 ); //TX1,TX2管脚的输出信号传递经发送调制的13.56的能量载波信号ucComMF522Buf [ 0 ] = ucReq_code; //存入 卡片命令字cStatus = PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 1, ucComMF522Buf, & ulLen ); //寻卡 if ( ( cStatus == MI_OK ) && ( ulLen == 0x10 ) ) //寻卡成功返回卡类型 { * pTagType = ucComMF522Buf [ 0 ];* ( pTagType + 1 ) = ucComMF522Buf [ 1 ];}elsecStatus = MI_ERR;return cStatus;}/** 函数名:PcdAnticoll* 描述 :防冲撞* 输入 :pSnr,卡片序列号,4字节* 返回 : 状态值* = MI_OK,成功* 调用 :外部调用*/
char PcdAnticoll ( u8 * pSnr )
{char cStatus;u8 uc, ucSnr_check = 0;u8 ucComMF522Buf [ MAXRLEN ]; u32 ulLen;ClearBitMask ( Status2Reg, 0x08 ); //清MFCryptol On位 只有成功执行MFAuthent命令后,该位才能置位WriteRawRC ( BitFramingReg, 0x00); //清理寄存器 停止收发ClearBitMask ( CollReg, 0x80 ); //清ValuesAfterColl所有接收的位在冲突后被清除ucComMF522Buf [ 0 ] = 0x93; //卡片防冲突命令ucComMF522Buf [ 1 ] = 0x20;cStatus = PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 2, ucComMF522Buf, & ulLen);//与卡片通信if ( cStatus == MI_OK) //通信成功{for ( uc = 0; uc < 4; uc ++ ){* ( pSnr + uc ) = ucComMF522Buf [ uc ]; //读出UIDucSnr_check ^= ucComMF522Buf [ uc ];}if ( ucSnr_check != ucComMF522Buf [ uc ] )cStatus = MI_ERR; }SetBitMask ( CollReg, 0x80 );return cStatus;}/** 函数名:CalulateCRC* 描述 :用RC522计算CRC16* 输入 :pIndata,计算CRC16的数组* ucLen,计算CRC16的数组字节长度* pOutData,存放计算结果存放的首地址* 返回 : 无* 调用 :内部调用*/
void CalulateCRC ( u8 * pIndata, u8 ucLen, u8 * pOutData )
{u8 uc, ucN;ClearBitMask(DivIrqReg,0x04);WriteRawRC(CommandReg,PCD_IDLE);SetBitMask(FIFOLevelReg,0x80);for ( uc = 0; uc < ucLen; uc ++)WriteRawRC ( FIFODataReg, * ( pIndata + uc ) ); WriteRawRC ( CommandReg, PCD_CALCCRC );uc = 0xFF;do {ucN = ReadRawRC ( DivIrqReg );uc --;} while ( ( uc != 0 ) && ! ( ucN & 0x04 ) );pOutData [ 0 ] = ReadRawRC ( CRCResultRegL );pOutData [ 1 ] = ReadRawRC ( CRCResultRegM );}/** 函数名:PcdSelect* 描述 :选定卡片* 输入 :pSnr,卡片序列号,4字节* 返回 : 状态值* = MI_OK,成功* 调用 :外部调用*/
char PcdSelect ( u8 * pSnr )
{char ucN;u8 uc;u8 ucComMF522Buf [ MAXRLEN ]; u32 ulLen;ucComMF522Buf [ 0 ] = PICC_ANTICOLL1;ucComMF522Buf [ 1 ] = 0x70;ucComMF522Buf [ 6 ] = 0;for ( uc = 0; uc < 4; uc ++ ){ucComMF522Buf [ uc + 2 ] = * ( pSnr + uc );ucComMF522Buf [ 6 ] ^= * ( pSnr + uc );}CalulateCRC ( ucComMF522Buf, 7, & ucComMF522Buf [ 7 ] );ClearBitMask ( Status2Reg, 0x08 );ucN = PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 9, ucComMF522Buf, & ulLen );if ( ( ucN == MI_OK ) && ( ulLen == 0x18 ) )ucN = MI_OK; elseucN = MI_ERR; return ucN;}/** 函数名:PcdAuthState* 描述 :验证卡片密码* 输入 :ucAuth_mode,密码验证模式* = 0x60,验证A密钥* = 0x61,验证B密钥* u8 ucAddr,块地址* pKey,密码* pSnr,卡片序列号,4字节* 返回 : 状态值* = MI_OK,成功* 调用 :外部调用*/
char PcdAuthState ( u8 ucAuth_mode, u8 ucAddr, u8 * pKey, u8 * pSnr )
{char cStatus;u8 uc, ucComMF522Buf [ MAXRLEN ];u32 ulLen;ucComMF522Buf [ 0 ] = ucAuth_mode;ucComMF522Buf [ 1 ] = ucAddr;for ( uc = 0; uc < 6; uc ++ )ucComMF522Buf [ uc + 2 ] = * ( pKey + uc ); for ( uc = 0; uc < 6; uc ++ )ucComMF522Buf [ uc + 8 ] = * ( pSnr + uc ); cStatus = PcdComMF522 ( PCD_AUTHENT, ucComMF522Buf, 12, ucComMF522Buf, & ulLen );if ( ( cStatus != MI_OK ) || ( ! ( ReadRawRC ( Status2Reg ) & 0x08 ) ) ){
// if(cStatus != MI_OK)
// printf("666") ;
// else
// printf("888");cStatus = MI_ERR; }return cStatus;}/** 函数名:PcdWrite* 描述 :写数据到M1卡一块* 输入 :u8 ucAddr,块地址* pData,写入的数据,16字节* 返回 : 状态值* = MI_OK,成功* 调用 :外部调用*/
char PcdWrite ( u8 ucAddr, u8 * pData )
{char cStatus;u8 uc, ucComMF522Buf [ MAXRLEN ];u32 ulLen;ucComMF522Buf [ 0 ] = PICC_WRITE;ucComMF522Buf [ 1 ] = ucAddr;CalulateCRC ( ucComMF522Buf, 2, & ucComMF522Buf [ 2 ] );cStatus = PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 4, ucComMF522Buf, & ulLen );if ( ( cStatus != MI_OK ) || ( ulLen != 4 ) || ( ( ucComMF522Buf [ 0 ] & 0x0F ) != 0x0A ) )cStatus = MI_ERR; if ( cStatus == MI_OK ){memcpy(ucComMF522Buf, pData, 16);for ( uc = 0; uc < 16; uc ++ )ucComMF522Buf [ uc ] = * ( pData + uc ); CalulateCRC ( ucComMF522Buf, 16, & ucComMF522Buf [ 16 ] );cStatus = PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 18, ucComMF522Buf, & ulLen );if ( ( cStatus != MI_OK ) || ( ulLen != 4 ) || ( ( ucComMF522Buf [ 0 ] & 0x0F ) != 0x0A ) )cStatus = MI_ERR; } return cStatus;}/** 函数名:PcdRead* 描述 :读取M1卡一块数据* 输入 :u8 ucAddr,块地址* pData,读出的数据,16字节* 返回 : 状态值* = MI_OK,成功* 调用 :外部调用*/
char PcdRead ( u8 ucAddr, u8 * pData )
{char cStatus;u8 uc, ucComMF522Buf [ MAXRLEN ]; u32 ulLen;ucComMF522Buf [ 0 ] = PICC_READ;ucComMF522Buf [ 1 ] = ucAddr;CalulateCRC ( ucComMF522Buf, 2, & ucComMF522Buf [ 2 ] );cStatus = PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 4, ucComMF522Buf, & ulLen );if ( ( cStatus == MI_OK ) && ( ulLen == 0x90 ) ){for ( uc = 0; uc < 16; uc ++ )* ( pData + uc ) = ucComMF522Buf [ uc ]; }elsecStatus = MI_ERR; return cStatus;}/** 函数名:PcdHalt* 描述 :命令卡片进入休眠状态* 输入 :无* 返回 : 状态值* = MI_OK,成功* 调用 :外部调用*/
char PcdHalt( void )
{u8 ucComMF522Buf [ MAXRLEN ]; u32 ulLen;ucComMF522Buf [ 0 ] = PICC_HALT;ucComMF522Buf [ 1 ] = 0;CalulateCRC ( ucComMF522Buf, 2, & ucComMF522Buf [ 2 ] );PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 4, ucComMF522Buf, & ulLen );return MI_OK;}void IC_CMT ( u8 * UID, u8 * KEY, u8 RW, u8 * Dat )
{u8 ucArray_ID [ 4 ] = { 0 };//先后存放IC卡的类型和UID(IC卡序列号)PcdRequest ( 0x52, ucArray_ID );//寻卡PcdAnticoll ( ucArray_ID );//防冲撞PcdSelect ( UID );//选定卡PcdAuthState ( 0x60, 0x10, KEY, UID );//校验if ( RW )//读写选择,1是读,0是写PcdRead ( 0x10, Dat );else PcdWrite ( 0x10, Dat );PcdHalt (); }void ShowID(u8 *p) //显示卡的卡号,以十六进制显示
{u8 num[9];u8 i;for(i=0;i<4;i++){num[i*2]=p[i]/16;num[i*2]>9?(num[i*2]+='7'):(num[i*2]+='0');num[i*2+1]=p[i]%16;num[i*2+1]>9?(num[i*2+1]+='7'):(num[i*2+1]+='0');}num[8]=0;for(i =0;i<10;i++){SN[i] = num[i];}sprintf(ss,"%s",SN);OLED_ShowString(0,0,"ID:",16); //oled显示OLED_ShowString(18,0,(u8*)ss,16); //oled显示GPIO_ResetBits(GPIOA, GPIO_Pin_11);delay_ms(5000);OLED_Clear();GPIO_SetBits(GPIOA,GPIO_Pin_11);if(strcmp(SN,"F3355E0D") == 0){//LED0 = 0;delay_ms(500);//LED0=1;}else {//OLED_ShowString(0,3,"error",16); //oled显示}printf("ID>>>%s\r\n", num);}②rc522.h
#ifndef __RC522_H
#define __RC522_H
#include "stm32f10x.h"//MF522命令字#define PCD_IDLE 0x00 //取消当前命令
#define PCD_AUTHENT 0x0E //验证密钥
#define PCD_RECEIVE 0x08 //接收数据
#define PCD_TRANSMIT 0x04 //发送数据
#define PCD_TRANSCEIVE 0x0C //发送并接收数据
#define PCD_RESETPHASE 0x0F //复位
#define PCD_CALCCRC 0x03 //CRC计算//Mifare_One卡片命令字#define PICC_REQIDL 0x26 //寻天线区内未进入休眠状态
#define PICC_REQALL 0x52 //寻天线区内全部卡
#define PICC_ANTICOLL1 0x93 //防冲撞
#define PICC_ANTICOLL2 0x95 //防冲撞
#define PICC_AUTHENT1A 0x60 //验证A密钥
#define PICC_AUTHENT1B 0x61 //验证B密钥
#define PICC_READ 0x30 //读块
#define PICC_WRITE 0xA0 //写块
#define PICC_DECREMENT 0xC0 //扣款
#define PICC_INCREMENT 0xC1 //充值
#define PICC_RESTORE 0xC2 //调块数据到缓冲区
#define PICC_TRANSFER 0xB0 //保存缓冲区中数据
#define PICC_HALT 0x50 //休眠//MF522 FIFO长度定义#define DEF_FIFO_LENGTH 64 //FIFO size=64byte
#define MAXRLEN 18//MF522寄存器定义// PAGE 0
#define RFU00 0x00
#define CommandReg 0x01
#define ComIEnReg 0x02
#define DivlEnReg 0x03
#define ComIrqReg 0x04
#define DivIrqReg 0x05
#define ErrorReg 0x06
#define Status1Reg 0x07
#define Status2Reg 0x08
#define FIFODataReg 0x09
#define FIFOLevelReg 0x0A
#define WaterLevelReg 0x0B
#define ControlReg 0x0C
#define BitFramingReg 0x0D
#define CollReg 0x0E
#define RFU0F 0x0F
// PAGE 1
#define RFU10 0x10
#define ModeReg 0x11
#define TxModeReg 0x12
#define RxModeReg 0x13
#define TxControlReg 0x14
#define TxAutoReg 0x15
#define TxSelReg 0x16
#define RxSelReg 0x17
#define RxThresholdReg 0x18
#define DemodReg 0x19
#define RFU1A 0x1A
#define RFU1B 0x1B
#define MifareReg 0x1C
#define RFU1D 0x1D
#define RFU1E 0x1E
#define SerialSpeedReg 0x1F
// PAGE 2
#define RFU20 0x20
#define CRCResultRegM 0x21
#define CRCResultRegL 0x22
#define RFU23 0x23
#define ModWidthReg 0x24
#define RFU25 0x25
#define RFCfgReg 0x26
#define GsNReg 0x27
#define CWGsCfgReg 0x28
#define ModGsCfgReg 0x29
#define TModeReg 0x2A
#define TPrescalerReg 0x2B
#define TReloadRegH 0x2C
#define TReloadRegL 0x2D
#define TCounterValueRegH 0x2E
#define TCounterValueRegL 0x2F
// PAGE 3
#define RFU30 0x30
#define TestSel1Reg 0x31
#define TestSel2Reg 0x32
#define TestPinEnReg 0x33
#define TestPinValueReg 0x34
#define TestBusReg 0x35
#define AutoTestReg 0x36
#define VersionReg 0x37
#define AnalogTestReg 0x38
#define TestDAC1Reg 0x39
#define TestDAC2Reg 0x3A
#define TestADCReg 0x3B
#define RFU3C 0x3C
#define RFU3D 0x3D
#define RFU3E 0x3E
#define RFU3F 0x3F//和MF522通讯时返回的错误代码#define MI_OK 0
#define MI_NOTAGERR (1)
#define MI_ERR (2)#define SHAQU1 0X01
#define KUAI4 0X04
#define KUAI7 0X07
#define REGCARD 0xa1
#define CONSUME 0xa2
#define READCARD 0xa3
#define ADDMONEY 0xa4#define SPIReadByte() SPIWriteByte(0)
u8 SPIWriteByte(u8 byte);
void SPI1_Init(void);#define SET_SPI_CS (GPIOF->BSRR=0X01)
#define CLR_SPI_CS (GPIOF->BRR=0X01)#define SET_RC522RST GPIOF->BSRR=0X02
#define CLR_RC522RST GPIOF->BRR=0X02/***********************RC522 函数宏定义**********************/
#define RC522_CS_Enable() GPIO_ResetBits ( GPIOA, GPIO_Pin_4 )//A4
#define RC522_CS_Disable() GPIO_SetBits ( GPIOA, GPIO_Pin_4 )#define RC522_Reset_Enable() GPIO_ResetBits( GPIOA, GPIO_Pin_8 )//A8
#define RC522_Reset_Disable() GPIO_SetBits ( GPIOA, GPIO_Pin_8 )#define RC522_SCK_0() GPIO_ResetBits( GPIOA, GPIO_Pin_5 )//A5
#define RC522_SCK_1() GPIO_SetBits ( GPIOA, GPIO_Pin_5 )#define RC522_MOSI_0() GPIO_ResetBits( GPIOA, GPIO_Pin_7 )//A7
#define RC522_MOSI_1() GPIO_SetBits ( GPIOA, GPIO_Pin_7 )#define RC522_MISO_GET() GPIO_ReadInputDataBit ( GPIOA, GPIO_Pin_6 )//A6void RC522_Handel (void);
void RC522_Init ( void ); //初始化
void PcdReset ( void ); //复位
void M500PcdConfigISOType ( u8 type ); //工作方式
char PcdRequest ( u8 req_code, u8 * pTagType ); //寻卡
char PcdAnticoll ( u8 * pSnr); //读卡号char PcdSelect ( u8 * pSnr );
char PcdAuthState ( u8 ucAuth_mode, u8 ucAddr, u8 * pKey, u8 * pSnr );
char PcdWrite ( u8 ucAddr, u8 * pData );
char PcdRead ( u8 ucAddr, u8 * pData );//void ShowID(u16 x,u16 y, u8 *p, u16 charColor, u16 bkColor); //显示卡的卡号,以十六进制显示
void ShowID(u8 *p); //显示卡的卡号,以十六进制显示extern unsigned char buf1[16];
extern unsigned char buf2[16]; #endif③main.c
int main(void)
{RC522_Init(); //RFID初始化while (1){ RC522_Handel(); }
} 实现效果:刷一下卡,下面的两个led就亮一会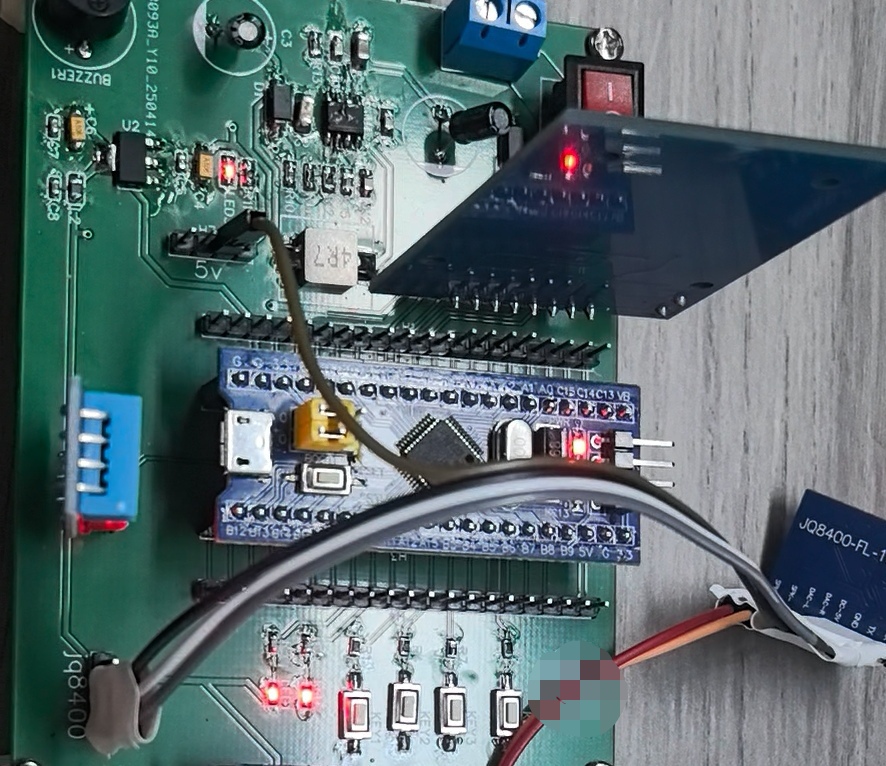
3.jq8400 的使用
硬件:tx接串口rx,rx接串口tx,5v,gnd,以及接喇叭的正负极,只有接喇叭才能发出语言,我用的是自带flash的jq8400,需要用usb线接电脑,把语言文件存进去,然后才能播放,该模块有专门的上位机以及语言合成软件等资料(上位机用通过tx,rx通过usb转ttl接电脑,usb数据线不行),需要该模块资料的话评论区说一下,该模块最好5v供电,3.3v会有杂音。
软件:
①jq8400.c
#include "jq8400.h"
#include "usart.h"
#include "usart3.h"/** @noBug 播放音乐*/
void playMusic(int i)
{switch(i){//在任何时候发此命令都会从头开始播放当前曲目case 1: uart3_send_byte(0xAA);uart3_send_byte(0x02);uart3_send_byte(0x00);uart3_send_byte(0xAC);break;//暂停case 2: uart3_send_byte(0xAA);uart3_send_byte(0x03);uart3_send_byte(0x00);uart3_send_byte(0xAD);break;//下一曲case 3: uart3_send_byte(0xAA);uart3_send_byte(0x06);uart3_send_byte(0x00);uart3_send_byte(0xB0);break;//上一曲case 4: uart3_send_byte(0xAA);uart3_send_byte(0x05);uart3_send_byte(0x00);uart3_send_byte(0xAF);break;//音量5:0xAA, 0x13, 0x01, 0x05, 0xC3 //音量10:0xAA, 0x13, 0x01, 0x0A, 0xC8 //音量15:0xAA, 0x13, 0x01, 0x0F, 0xCD//音量20:0xAA, 0x13, 0x01, 0x14, 0xD2 //音量25:0xAA, 0x13, 0x01, 0x19, 0xD7 //音量30:0xAA, 0x13, 0x01, 0x1E, 0xDCcase 5: uart3_send_byte(0xAA);uart3_send_byte(0x13);uart3_send_byte(0x01);uart3_send_byte(0x0F);uart3_send_byte(0xCD);break;//结束播放case 6:uart3_send_byte(0xAA);uart3_send_byte(0x10);uart3_send_byte(0x00);uart3_send_byte(0xBA); break;default:uart3_send_str((u8 *)"the order does not exist!\r\n");break;}
}
②jq8400.h
#ifndef __JQ8400_H
#define __JQ8400_H#include "stm32f10x.h"
#define USART_REC_LEN 200 //定义最大接收字节数 200
#define EN_USART1_RX 1 //使能(1)/禁止(0)串口1接收extern u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.末字节为换行符
extern u16 USART_RX_STA; //接收状态标记
//如果想串口中断接收,请不要注释以下宏定义
void uart_init(u32 bound);
void playMusic(int i);
#endif /* __JQ8400_H */
③main.c
int main(void)
{usart3_init(9600); //串口3初始化为9600,jq8400使用while (1){ playMusic(1); //语言播报delay_ms(150); playMusic(5); //设置音量delay_ms(1500); }
}该模块就不进行演示了,想要完整源码的请一键三连后私聊获取!!!
相关文章:

STM32+dht11+rc522+jq8400的简单使用
1.dht11的使用 硬件:3v3,gnd,data数据线接一个gpio,三根线即可 软件: ①dht11.c #include "dht11.h" #include "delay.h" #include "stdbool.h"static STRUCT_DHT11_TYPEDEF dht11;…...

mpstat指令介绍
文章目录 1. 功能介绍2. 语法介绍3. 应用场景4. 实际举例 1. 功能介绍 mpstat 英文全称( Multi-Processor Statistics),多处理器统计信息的含义。 下面大致说一下功能作用: 多核性能监控 可实时监控每个 CPU 核心的利用率、中断频率、上下文切换等指标&…...

网络层IP协议知识大梳理
全是通俗易懂的讲解,如果你本节之前的知识都掌握清楚,那就速速来看我的IP协议笔记吧~ 自己写自己的八股!让未来的自己看懂! (全文手敲,受益良多) 网路基础3 网路层 TCP并没有把数据发到网路…...

Linux-codec
codec原理图 codec接口 ①音频输入接口,连接mic ②音频输出接口,连接speaker ③sai/i2s接口,连接soc,soc和codec互发音频数据 ④i2c接口,连接soc,soc配置codecsai音频接口 MCLK:主时钟&#x…...

HTTP协议与web服务器
HTTP协议与web服务器 目录 一、浏览器与服务器通信过程 1.1 域名解析与连接建立 1.2 数据交互 1.3 连接管理 二、HTTP请求报头 2.1 请求行 2.2 请求报头 2.3 空行 2.4 请求体 三、HTTP应答报头 3.1 http应答报文头部信息 1. 状态行 2. 服务器名称 3. 数据长度 4…...

ECharts散点图-散点图7,附视频讲解与代码下载
引言: ECharts散点图是一种常见的数据可视化图表类型,它通过在二维坐标系或其它坐标系中绘制散乱的点来展示数据之间的关系。本文将详细介绍如何使用ECharts库实现一个散点图,包括图表效果预览、视频讲解及代码下载,让你轻松掌握…...
)
蓝桥杯之二分法(二)
存在某条件使得一边均满足,一边均不满足: 如果问题满足某种条件,使得在某个点之前的所有值都满足条件,而之后的所有值都不满足条件(或反之),那么可以使用二分法来找到这个边界。 1.问题的解具有…...

当 AI 有了 “万能插头” 和 “通用语言”:MCP 与 A2A 如何重构智能体生态
目录 一、MCP:让 AI 拥有 “万能工具插头” 1.1 从 “手工对接” 到 “即插即用” 1.2 架构解密:AI 如何 “指挥” 工具干活 1.3 安全优势:数据不出门,操作可追溯 二、A2A:让智能体学会 “跨语言协作” 2.1 从 “…...

从零开始 保姆级教程 Ubuntu20.04系统安装MySQL8、服务器配置MySQL主从复制、本地navicat远程连接服务器数据库
从零开始:Ubuntu 20.04 系统安装 MySQL 8、服务器配置 MySQL 主从复制、本地 Navicat 远程连接服务器数据库 初始化服务器1. 更新本地软件包列表2. 安装 MySQL 服务器3. 查看 MySQL 安装版本4. 登录 MySQL 管理终端5. 设置 root 用户密码(推荐使用 nativ…...

PHP序列化/反序列化漏洞原理
PHP反序列化原理详解 引言 PHP反序列化是PHP中一个重要的概念,它允许将序列化后的数据重新转换为原始的数据结构。在PHP中,可以使用serialize()函数将数据序列化为字符串,然后使用unserialize()函数将序列化后的字符串反序列化为原来的数据结…...
)
并查集(力扣2316)
这种涉及不同连通分量的,看上去就可以用并查集。并查集的模板请参见上一篇内容。并查集(力扣1971)-CSDN博客 现在我们要求的是无法互相到达的点对。根据观察易得,我们只需要求出每个并查集的元素数量,然后遍历每个点&…...

【web服务_负载均衡Nginx】一、Nginx 基础与核心概念解析
一、Nginx 概述:从起源到行业地位 Nginx(发音为 “engine x”)是一款高性能的开源 Web 服务器、反向代理服务器,同时具备负载均衡、内容缓存、TCP/UDP 代理及邮件代理等功能。它由俄罗斯工程师伊戈尔・赛索耶夫(Igo…...
一键搞定 | 附完整代码示例)
【Python入门】文件读取全攻略:5种常用格式(csv/excel/word/ppt/pdf)一键搞定 | 附完整代码示例
大家好,我是唐叔!今天给大家带来一篇Python文件读取的终极指南。无论是数据分析、办公自动化还是爬虫开发,文件读取都是Python程序员必须掌握的核心技能。本文将详细介绍Python处理5大常用文件格式的方法,包含完整可运行的代码示例…...
)
考研系列-计算机网络冲刺考点汇总(下)
写在前面 本文将总结王道408考研课程的计算机网络冲刺考点的第四章到第六章内容(网络层、传输层、应用层)。 第四章、网络层 1.SDN SDN的基本概念 注意对应关系:数据平面-转发;控制平面-路由选择 2.路由选择算法 (1)RIP协议-基于…...

GitLab-CI集成FTP自动发布
简介 在某些场景下,代码是以 FTP 的方式部署到服务器上,那么我们可以使用 GitLab-CI 来实现自动发布。 配置参考 .sftp-deploy: &sftp-deploy |-files$(git log -10 --prettyformat: --name-only | grep -v ^$ | sort -u)include_patterns$(echo …...

Ubuntu 安装cuda踩坑记录
Ubuntu 安装cuda踩坑记录: 运行run文件时出错: sh cuda_12.4.0_550.54.14_linux.run 报错: ./cuda-installer: error while loading shared libraries: libxml2.so.2: cannot open shared object file: No such file or directory 解决&am…...

用GitHub Actions实现CI/CD
目录 简介GitHub Actions基础工作流配置文件实战案例 Node.js应用Python应用Docker容器构建与部署 最佳实践常见问题与解决方案总结 简介 持续集成/持续部署(CI/CD)已成为现代软件开发不可或缺的一部分。它通过自动化构建、测试和部署过程,帮助开发团队更快、更可…...

使用AI工具打造专业级PPT的完整方案,结合 DeepSeek构思、Kimi生成内容、Napkin优化设计 等工具,分阶段详细说明流程及工具使用
以下是使用AI工具打造专业级PPT的完整方案,结合 DeepSeek构思、Kimi生成内容、Napkin优化设计 等工具,分阶段详细说明流程及工具使用: 一、全流程阶段划分 阶段目标核心工具1. 构思阶段明确主题、结构、核心信息,生成大纲与逻辑…...
和 顺序表(ArrayList))
【数据结构】线性表( List)和 顺序表(ArrayList)
【数据结构】线性表( List)和 顺序表(ArrayList) 一、线性表 List二、List 接口的常用方法三、ArrayList与顺序表3.1 引入顺序表的原因?3.2 ArrayList 的使用3.2.1 ArrayList 的创建3.2.2 添加元素:list.ad…...

嵌入式开发--STM32软件和硬件CRC的使用--续篇
本文是《嵌入式开发–STM32软件和硬件CRC的使用》的续篇,又踩到一个坑,发出来让大家避一下坑。 按照G0系列的设置,得出错误的结果 前文对应的是STM32G0系列,今天在用STM32G4系列时,按照前文的设置,用硬件…...

探索鸡养殖虚拟仿真实验:科技赋能养殖新体验
在科技飞速发展的今天,虚拟仿真技术逐渐渗透到各个领域,就连传统的养殖业也迎来了数字化的变革。最近,我参与了一场别开生面的鸡养殖虚拟仿真实验,不仅学到了专业的养殖知识,还收获了前所未有的沉浸式体验。现在&#…...

知识图谱中医知识问答系统|养生医案综合可视化系|推荐算法|vue+flask+neo4j+mysql
文章结尾部分有CSDN官方提供的学长 联系方式名片 文章结尾部分有CSDN官方提供的学长 联系方式名片 关注B站,有好处! ✅编号 :F040 pro ✅技术架构: vueflaskmysqlneo4jltpac ✅实现功能:实现基于中医药材和药方的知识图谱可视化,在…...

【AI】——结合Ollama、Open WebUI和Docker本地部署可视化AI大语言模型
🎼个人主页:【Y小夜】 😎作者简介:一位双非学校的大三学生,编程爱好者, 专注于基础和实战分享,欢迎私信咨询! 🎆入门专栏:🎇【MySQL࿰…...

AI 模型高效化:推理加速与训练优化的技术原理与理论解析
AI 模型高效化:推理加速与训练优化的技术原理与理论解析 文章目录 AI 模型高效化:推理加速与训练优化的技术原理与理论解析一、推理加速:让模型跑得更快的“程序员魔法”(一)动态结构自适应推理:像人类一样…...

python学习—详解word邮件合并
系列文章目录 python学习—合并TXT文本文件 python学习—统计嵌套文件夹内的文件数量并建立索引表格 python学习—查找指定目录下的指定类型文件 python学习—年会不能停,游戏抽签抽奖 python学习—循环语句-控制流 python学习—合并多个Excel工作簿表格文件 pytho…...

vscode与vim+cscope+tags热键冲突
[ctrl w] s 对于vim时水平分割窗口热键 对vscode, [ctrl w]时关闭当前窗口热键 在vscode中如下配置可以发送热键到shell, 跳过vscode:...

直播系统源码开发:解锁幸运礼物功能的商业魔力与运营策略
在当今如火如荼的直播经济中,幸运礼物功能已成为平台提升用户黏性、刺激消费的"黄金按钮"。山东布谷科技将深入剖析幸运礼物功能的技术逻辑与商业价值,并为运营者提供一套完整的策略框架,帮助您在激烈的直播赛道中脱颖而出。 一、…...

毕业设计效率提升工具与避坑指南
本文为毕业设计后的经验记录,包含写作过程中的一些实用工具和注意事项。 一、📌实验及写作实用技巧二、🚀 效率提升工具三、📊论文完成后的格式检查 本文为毕业设计后的经验记录,包含写作过程中的一些实用工具和注意事…...
)
Python网络爬虫设计(二)
目录 六、BeautifulSoup库 1、常见的提取分析网页内容的三种方式 (1)正则表达式 (2)BeautifulSoup库 (3)pyppeteer库中的元素查找函数 2、HTML中的tag 3、BeautifulSoup库的安装和导入 4、Beautiful…...

滑动窗口209. 长度最小的子数组
1.题目 给定一个含有 n 个正整数的数组和一个正整数 target 。 找出该数组中满足其总和大于等于 target 的长度最小的 子数组 [numsl, numsl1, ..., numsr-1, numsr] ,并返回其长度。如果不存在符合条件的子数组,返回 0 。 示例 1: 输入&…...

如何避免被目标网站识别为爬虫?
文章目录 前言1. 合理设置请求头2. 控制请求频率3. 模拟真实用户行为4. 使用代理 IP5. 处理验证码6. 会话管理 前言 为避免被目标网站识别为爬虫,可从请求头设置、请求频率控制、模拟用户行为、使用代理、处理验证码和会话管理等多个方面采取措施,以下是…...

Dell戴尔服务器 PowerEdge R750xs + window server2012r2 || 2016
因要求需要给新服务器装个 win server2012或者2016系统 XXX使用U盘制作PE系统U盘安装系统不行,适合普通win8,win10,win11U盘制作PE系统U盘安装win10系统教程U盘制作PE系统U盘安装win10系统教程https://mp.weixin.qq.com/s/t0W8aNJaHPAU8T78nh…...

如何通过数据分析提升软件开发项目的成功率?
引言 在软件开发中,项目延期、超预算、需求反复变更等问题屡见不鲜。数据分析作为项目管理的重要工具,正在被越来越多的企业用于提升项目成功率。通过科学利用项目数据,团队可以做出更准确的决策,避免重复踩坑,从而大幅…...

模型的RAG
RAG 什么是RAG 当岳不群相当武林的盟主时候,你的给他一个葵花宝典(秘籍RAG) RAG的原理 建立索引: 首先要清洗和提取原始数据,将 PDF、Docx等不同格式的文件解析为纯文本数据 然后将文本数据分割成更小的片段(chunk)…...

基于多模态双路TCN-SE-YOLO的小目标检测
首先声明:该思路在小目标检测领域尚未有成果发表,感兴趣的小伙伴可以借鉴! 一、引言 1.1 研究背景 小目标检测在交通监控(车牌识别)、工业检测(PCB缺陷)及农业(病虫害斑点)等领域具有重要应用价值传统单模态检测方法在复杂场景下的漏检率高达40%以上(VisDrone 2021…...

idea maven 命令后控制台乱码
首先在idea中查看maven的编码方式 执行mvn -v命令 查看编码语言是GBK C:\Users\13488>mvn -v Apache Maven 3.6.3 (cecedd343002696d0abb50b32b541b8a6ba2883f) Maven home: D:\maven\apache-maven-3.6.3\bin\.. Java version: 1.8.0_202, vendor: Oracle Corporation, runt…...
 中安装纯净win10详细过程)
在Vmware15(虚拟机免费) 中安装纯净win10详细过程
一、软件备选 1. VMware15.5.1 网盘下载地址 链接: https://pan.baidu.com/s/1y6GLJ2MG-1tomWblt3otsg?pwdim8e 提取码: im8e 2. windows镜像下载 去官网下载ios包 链接:https://www.microsoft.com/zh-cn/software-download/windows10 二、在VMware15.5.1下安装w…...

RISC-V 与 OpenHarmony 的结合意义与应用建议
RISC-V 与 OpenHarmony 的结合意义与应用建议 一、结合的意义 (一)硬件与软件的协同创新 RISC-V 作为硬件层的开源指令集架构,为 OpenHarmony 提供了强大的硬件支持。这种支持不仅体现在硬件性能的提升上,还为 OpenHarmony 的分…...

让SQL飞起来:搭建企业AI应用的SQL性能优化实战
我上一篇文章已经讲解过了如何使用公开的AI模型来优化SQL.但这个优化方法存在一定的局限性.因为公开的AI模型并不了解你的数据表结构是什么从而导致提供的优化建议不太准确.而sql表结构又是至关重要的安全问题,是不能泄露出去的.所以在此背景下我决定搭建一个自己的AI应用在内网…...

驱动开发硬核特训 · Day 14:深入理解 Power 管理驱动架构与实战应用
在嵌入式系统中,Power(电源)管理驱动既关乎系统稳定性,又直接影响功耗与续航,是系统设计中绕不开的核心模块。今天我们通过理论实战的形式,一次性讲清楚: Linux 中电源管理驱动的核心框架Regul…...

备份思科路由器设备文件实例
实例需求: (1)备份路由器的配置文件startup-config和映像文件 (2)备份交换机的配置文件startup-config和映像文件 注:PC3为TFTP服务器 结构示意图: 实例配置一: 备份路由器的配置文件startup-config和映像文件 步骤: 在PC3上打开tftp服务。确保PC3可以ping通11.1.1.…...

游戏引擎学习第231天
设定当天的主题 我们现在到了一个很少出现在直播中的阶段,但今天是那种需要解释计算机科学基础概念的日子。因此,今天我们将讨论这个内容,今天的重点是“大O表示法”(Order Notation),我将用黑板来解释这些…...

PclSharp ——pcl的c#nuget包
简介: NuGet Gallery | PclSharp 1.8.1.20180820-beta07 下载.NET Framework 4.5.2 Developer Pack: 下载 .NET Framework 4.5.2 Developer Pack Offline Installer 离线安装nupkg: nupkg是visual studio 的NuGet Package的一个包文件 安…...

Java性能剖析工具箱
1. 基础知识 1.1 Java性能调优概述 1.1.1 性能调优的重要性 性能调优是提升系统效率、降低成本和增强用户体验的关键步骤。通过优化,可以减少响应时间、降低资源消耗并提高系统的稳定性和可扩展性。 1.1.2 性能问题的常见表现 高CPU使用率:可能由热点方法或线程阻塞引起。…...

信息学奥赛一本通 1622:Goldbach’s Conjecture | 洛谷 UVA543 Goldbach‘s Conjecture
【题目链接】 ybt 1622:Goldbach’s Conjecture 洛谷 UVA543 Goldbach’s Conjecture 【题目考点】 1. 筛法求质数表 埃筛线性筛(欧拉筛) 知识点讲解见信息学奥赛一本通 2040:【例5.7】筛选法找质数 【解题思路】 首先使用埃…...

408数据结构绪论刷题001
答案:D 解析: • A选项:数据元素是组成数据对象的基本单位 ,它只是数据的基本个体,不能完整定义数据结构,所以A选项错误。 • B选项:数据对象是性质相同的数据元素的集合,仅仅描述…...

RNN - 语言模型
语言模型 给定文本序列 x 1 , … , x T x_1, \ldots, x_T x1,…,xT,语言模型的目标是估计联合概率 p ( x 1 , … , x T ) p(x_1, \ldots, x_T) p(x1,…,xT)它的应用包括 做预训练模型(eg BERT,GPT-3)生成本文ÿ…...
)
前端面试题---GET跟POST的区别(Ajax)
GET 和 POST 是两种 HTTP 请求方式,它们在传输数据的方式和所需空间上有一些重要区别: ✅ 一句话概括: GET 数据放在 URL 中,受限较多;POST 数据放在请求体中,空间更大更安全。 📦 1. 所需空间…...

【MCP】第一篇:MCP协议深度解析——大模型时代的“神经连接层“架构揭秘
【MCP】第一篇:MCP协议深度解析——大模型时代的"神经连接层"架构揭秘 一、什么是MCP?二、为什么需要MCP?三、MCP的架构四、MCP与AI交互的原理4.1 ReAct(Reasoning Acting)模式4.2 Function Calling 模式 五…...

新生宿舍管理系统
收藏关注不迷路!! 🌟文末获取源码数据库🌟 感兴趣的可以先收藏起来,还有大家在毕设选题(免费咨询指导选题),项目以及论文编写等相关问题都可以给我留言咨询,希望帮助更多…...