AutoEval:现实世界中通才机器人操作策略的自主评估
25年3月来自 UC Berkeley 和 Nvidia 的论文“AutoEval: Autonomous Evaluation of Generalist Robot Manipulation Policies in the Real World”。
可规模化且可复现的策略评估一直是机器人学习领域长期存在的挑战。评估对于评估进展和构建更优策略至关重要,但在现实世界中进行评估,尤其是在能够提供统计上可靠结果的规模上,耗费大量人力时间且难以获得。评估日益通才的机器人策略,需要日益多样化的评估环境,这使得评估瓶颈更加突出。为了使现实世界中的机器人策略评估更加实用,本文提出 AutoEval,一个能够在极少人工干预的情况下全天候自主评估通才机器人策略的系统。用户将评估作业提交到 AutoEval 队列,与 AutoEval 交互,类似于使用集群调度系统提交软件作业的方式,AutoEval 将在提供自动成功检测和自动场景重置的框架内调度策略进行评估。
AutoEval 几乎可以完全消除评估过程中的人工干预,实现全天候评估,并且评估结果与手动进行的真实评估结果高度一致。为了促进机器人社区对通才策略的评估,开放多个 AutoEval 场景,这些场景均来自广受欢迎的 BridgeData 机器人配置,并配备 WidowX 机械臂。未来,希望 AutoEval 场景能够跨机构建立,从而形成一个多样化的分布式评估网络。
机器人基础模型有望彻底改变机器人学习的“工作流程”:这些模型不再针对单个任务或环境训练策略,而是在一系列场景、任务和机器人实例中进行训练[13,12,60,36,68,69,21,11,31],从而提供能够在新环境中解决新任务的通才策略。这种向通才训练的转变,必然要求这些策略的评估方式也发生类似的转变。传统的单任务策略评估通常涉及几十次手动可完成的策略部署,而机器人基础模型可能需要在各种任务和场景中进行数百次策略部署,才能准确评估其通才能力。例如,对最近推出的 OpenVLA 模型 [36] 与其基线进行全面评估,需要在四个机器人设置和三个机构中进行 2500 多次策略部署,并且总共需要超过 100 小时的人工来重置场景、部署策略和记录成功率。在模型开发和设计改进过程中进行的评估可能会使这项工作复杂化数倍。
通才机器人策略。近期,在大规模机器人数据集 [16, 77, 35, 68] 的推动下,机器人基础模型取得了重大进展 [13, 36, 60, 34, 24, 9, 50, 3, 69, 81, 11, 63]。这些模型经过训练,可以执行各种任务(例如,取放、折叠衣物)[77, 36, 11, 63],适应具有不同背景和干扰因素的各种场景 [87, 25],并控制多个机器人实例(例如,四足动物、机械臂、无人机)[80, 21]。随着这些通才机器人策略能力的提升,评估变得越来越耗时,因为衡量模型性能需要评估各种不同的技能和场景。例如,Kim [36] 的报告结果需要数千次评估试验和超过 100 小时的人工劳动。开发过程中所需的评估试验可能使这个数字增加数倍。这使得通才机器人策略的开发和全面评估变得越来越具有挑战性,需要一种更具可扩展性的评估方法。
自主机器人操作。先前的多项研究已将人类监督的需求视为机器人学习的一个关键限制因素 [87, 2, 34, 65, 15, 40]。虽然这些研究通常侧重于自主策略改进而非自主策略评估,但它们在机器人重置和成功检测方面面临着许多共同的挑战。因此,用于学习重置策略和成功检测器的许多技术,都受到自主机器人学习领域先前研究的启发,甚至一些指标也是共享的,例如测量人为干预的频率 [6]。虽然大多数机器人学习研究人员都意识到评估的成本,但现有的自动化真实机器人评估的努力,仅限于特定于任务的解决方案,这些解决方案通常涉及环境监测,例如使用弹簧驱动或脚本化的重置机制 [57, 19, 34]。
先前的研究试图通过构建逼真的模拟环境来解决这一评估瓶颈 [46],但模拟环境与现实世界之间的差距可能导致结果不可靠,而且许多任务(如布料或液体操作)都难以以足够的保真度进行模拟。这项工作的目标是开发一个机器人策略评估系统,该系统将现实世界评估的可靠性与评估通才机器人策略所需的可扩展性相结合。现实世界机器人评估可扩展性的一个关键瓶颈,是人类操作员进行评估、重置场景和评估策略成功所需的时间。如果能够将所需的人工参与降至最低,可以通过全天候运行评估来大幅提高真实机器人评估的吞吐量。
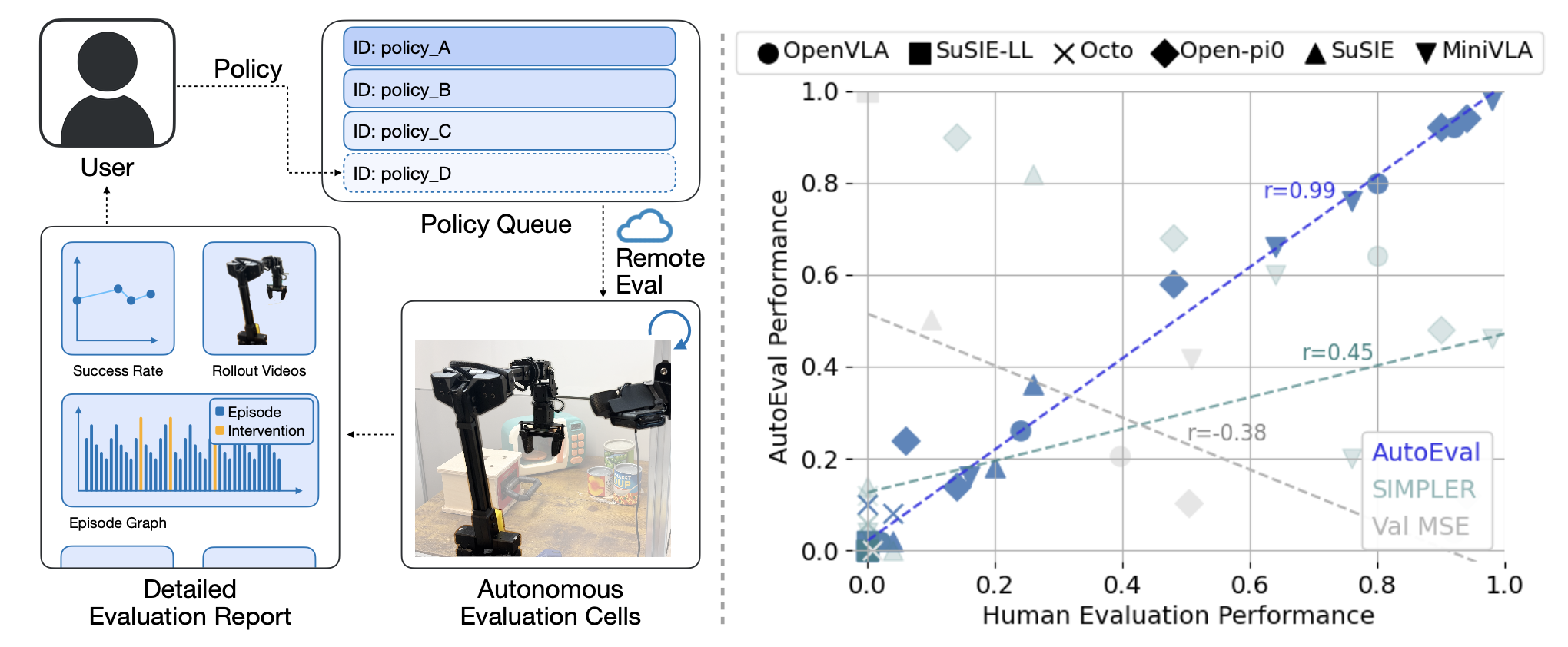
为此,本文提出 AutoEval,一个用于设计自主真实机器人评估的系统(如图所示)。要使用 AutoEval,人类用户需要将策略排队等待评估,随后 AutoEval 系统会在极少的人工干预下进行评估。该系统会自动运行策略、评估结果、重置场景,并最终向用户返回详细的评估报告。AutoEval 代表一种现实世界机器人评估的新范式,由于对人工干预的依赖程度极低,吞吐量更高,每次评估的试验次数越多,方差就越小。
设计一个有效的系统来自主评估真实机器人操作策略面临多重挑战,例如需要自主重置场景和成功检测。本文工作利用大型预训练模型来学习自动重置策略和成功检测器。重要的是,会根据评估场景和任务调整这些模型,以实现高可靠性并最大限度地减少人工干预。其提出一种构建自动化机器人评估的通用方案,并在流行的 BridgeV2 机器人评估环境中将其实例化用于常见任务 [77]。
考虑的策略评估问题设置相当简单:给定一个机器人策略 𝜋(𝑎|𝑜, 𝑙),该策略在给定观测 𝑜 和语言指令 𝑙 的情况下输出动作,以及一个任务定义 𝑇 ∶ S → {0, 1},该任务定义将状态映射到任务成功,感兴趣的是估计机器人策略 𝜋 成功完成任务 𝑇 的概率。
策略评估的输出是一个从 0 到 1 的评估分数,表示成功概率。在机器人评估期间,通常要求策略多次执行相同的任务,同时对机器人和环境的初始状态应用随机化,以便在初始状态分布 𝜌(𝑠) 下对策略的性能进行统计上显著的估计。
传统上,人类评估员需要在整个评估过程中在场,监督机器人,在试验之间将场景重置到新的初始位置,并对策略的性能进行评分。每次试验可能只需几分钟,但对于需要在多个任务和试验中进行评估的通才策略,对单个检查点进行全面评估可能很快就会花费数天时间。
用于自主策略评估的 AutoEval 系统,旨在最大限度地减少机器人评估所需的人工时间。在如下算法 1 中概述了 AutoEval 系统。其核心遵循与传统的人工评估相同的结构,运行多个试验,并间歇性地重置和性能评分。然而,AutoEval 引入多个学习模块,可以自动执行通常需要人类评估员完成的任务。 AutoEval 由三个关键模块组成:(1) 成功分类器,用于评估策略在给定任务上的成功程度;(2) 重置策略,用于在试验完成后将场景从初始状态分布重置回某个状态;(3) 程序化安全措施和故障检测,用于防止机器人损坏并在必要时请求人工干预。这三个组件均通过灵活的学习模型实现,因此可以轻松适应各种机器人任务的自动化评估。
成功分类器。成功分类器 C_T ∶ S → {0, 1} 用于近似真实任务成功值 𝑇 ∶ S → {0, 1},将图像状态映射到二值成功标签。 AutoEval 并不像前人工作 [27, 57] 中那样手工制定特定任务的成功规则,而是训练一个学习的成功分类器 C_T,这个方法可以轻松应用于各种机器人任务。具体来说,收集一小组成功和失败状态的示例图像。使用大约 1000 张图像,通过遥操作机器人并将帧保存在轨迹中,收集这些图像只需不到 10 分钟。然后,对预训练的视觉语言模型 (VLM) 进行微调,以完成二进制成功检测任务。给定一个语言提示,例如“抽屉打开了吗?回答是或否”,以及一个图像观察结果,该模型经过训练可以预测任务是否成功完成。使用预训练的 VLM 来获得一个对环境的小扰动具有鲁棒性的分类器,无需收集大量示例图像进行微调。在实践中,使用 Paligemma VLM [8] 来训练成功分类器,但许多其他开源 VLM 也适用。
重置策略。重置策略 𝜋_𝑇 (𝑎|𝑠) “撤销”了评估策略 𝜋 在评估部署过程中执行的操作,将场景和机器人恢复到初始状态分布 𝜌(𝑠) 的状态。同样,AutoEval 的目标并非依赖于弹簧或磁铁等特定于任务的“硬件重置”,而是设计一个能够灵活应用于各种机器人任务的系统。因此,使用学习的策略来重置场景。脚本化的重置策略,也可用于一些结构更复杂的任务,但学习的策略提供了一种更通用的方法,可应用于各种任务。为了学习重置策略,手动收集一小组约 100 条高质量的演示轨迹,这些轨迹根据策略部署成功和失败的合理最终状态重置场景。实际上,此类数据收集通常只需不到两个小时。然后,利用行为克隆对通才机器人策略进行微调,将其作为重置策略。从通才策略检查点开始可确保重置策略更加稳健,并且只需更少的重置演示即可获得可靠的重置。
安全检测器。虽然成功检测器和重置策略在理论上可以实现自主评估,但在实践中,存在许多问题和极端情况会阻碍评估的自主进行,例如机器人硬件故障、场景或机器人损坏,或者物体超出范围。在 AutoEval 中,采用多种措施来预防或妥善处理此类问题。首先,实施机器人受限的安全工作空间边界,因此性能较差的策略不会损坏机器人或 AutoEval 场景。其次,通过程序检查机器人的电机状态,并在电机发生故障(例如由于机器人与环境发生碰撞)时重新启动电机。还训练一个“重置成功分类器”,类似于上面的成功分类器,它可以识别重置是否成功,否则重新运行重置策略。在这两种情况下,如果多次重启或重置失败(例如由于目标从工作区掉落),会实现一个自动通知系统,请求“随叫随到”的人工操作员进行人工干预。实践中表明,对于实现的 AutoEval 单元来说,此类人工干预非常罕见(每 24 小时自主评估仅需 3 次干预)。
设置时间。总体而言,为新任务构建 AutoEval 单元只需 1-3 小时的人工操作,总计不到 5 小时,包括成功分类器的模型训练时间和重置策略。相比之下,即使在单个典型研究项目中,人工评估时间也可以节省数十小时。
这是一个基于 BridgeData V2 数据集 [77, 23] 的自动评估系统实例,该系统适用于多种环境和任务。BridgeData 是一个多样化的操作数据集,包含 60+ 个使用 WidowX 6DoF 机械臂的操作演示,涵盖 13 种不同的技能和 24 种环境。OpenVLA [36]、RT2-X [13]、CrossFormer [21] 和 Pi0 [11, 63] 等最先进的通才操作策略均在 BridgeData 或其超集 [16] 上进行训练,因此,在此设置上进行的策略评估是通才策略可扩展评估方法的天然试验台。
与 Walke [77] 的研究类似,该 Bridge-AutoEval 装置使用配备第三人称 Logitech C920 HD RGB 摄像头的 WidowX 250 6 自由度机械臂来捕捉机器人工作空间自上而下的 256×256 图像,如图所示。使用带有阻塞控制的末端执行器增量动作。
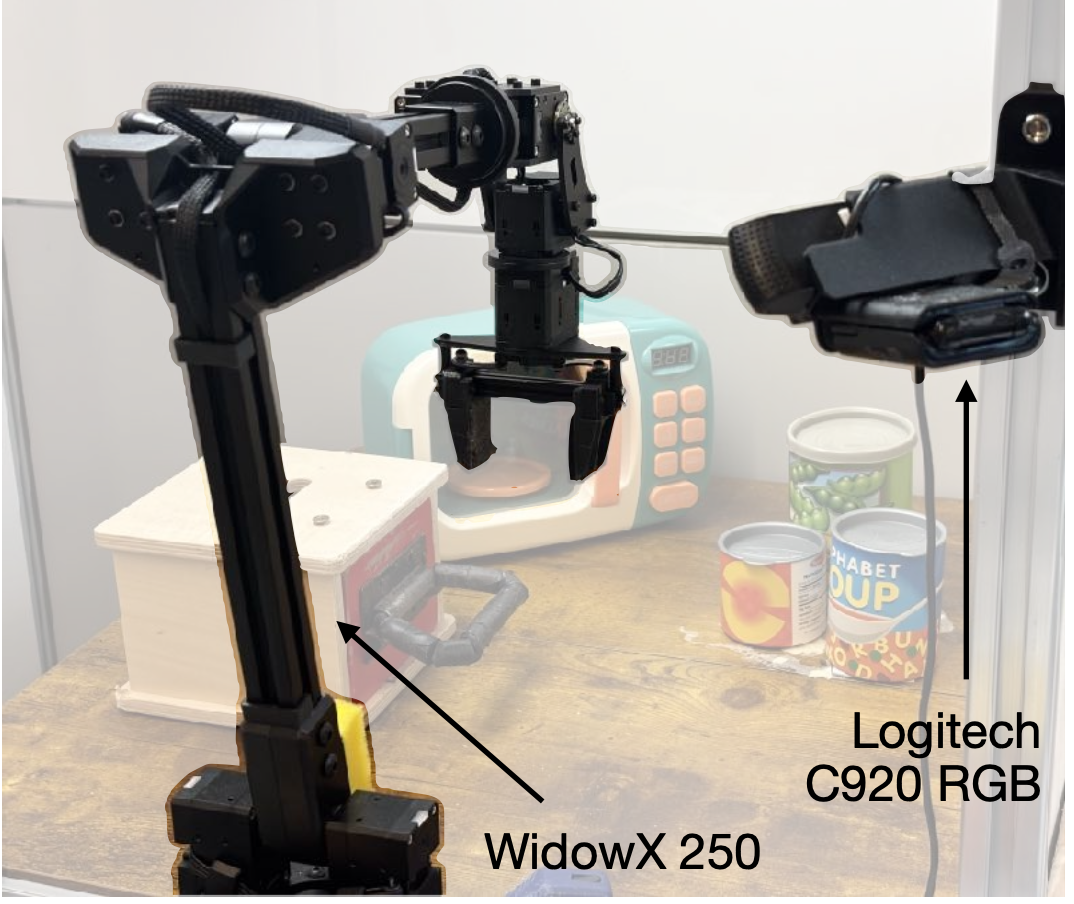
如图所示,构建三个可以并行评估策略的 Bridge-AutoEval 单元,称为抽屉场景、水槽场景和布料场景。在每个机器人站上方使用铝制三脚架灯保持恒定照明。每个场景支持对一到两个操作任务进行评估:抽屉支持评估“打开抽屉”和“关闭抽屉”;水槽支持评估取放任务“将茄子放入蓝色水槽”和“将茄子放入黄色篮子”;布料支持可变形体操作任务“将布料从右上向左下折叠”。虽然 BridgeData 数据集中没有完全相同的场景,但所有场景都包含在 BridgeData 所包含的任务分布中,并且已在先前的研究中用于评估通才策略 [36, 87, 84, 10]。之所以选择这些任务,是因为它们代表不同类型的操作任务:拾取和放置、铰接体操作和可变形体操作。

对于每个场景,按照前面提到的步骤训练成功分类器并重置策略。还为 WidowX 机器人实现了安全检测器,以及一个自动消息传递系统,该系统通过以编程方式向 Slack 频道发送推送通知来请求人工干预,该频道有“随叫随到”的操作员,用于给定的评估班次。
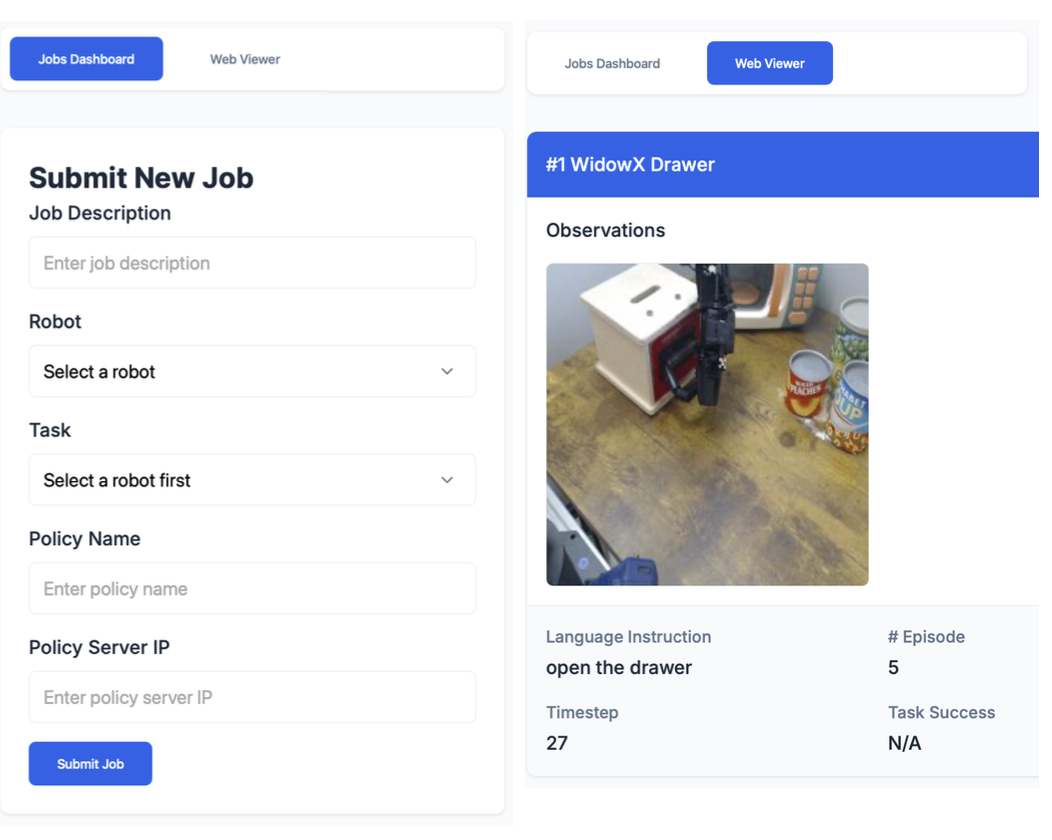
本文工作将两个 Bridge-AutoEval 单元公开,以便其他研究人员可以安排对其策略的评估。随着时间的推移,这将有助于提高机器人评估的可重复性和可比性。为了实现这一目标,提供一个公共的 Web UI,用于访问 Bridge-AutoEval 单元并监控评估进度,如图所示。用户可以选择要执行评估的任务,并提供“策略服务器”的 IP 地址,该服务器负责执行他们想要评估的策略。根据图像观测值和任务指令,服务器将运行该策略并返回一系列 7D 动作供 WidowX 机器人执行(提供在服务器界面中包装用户策略的示例代码)。
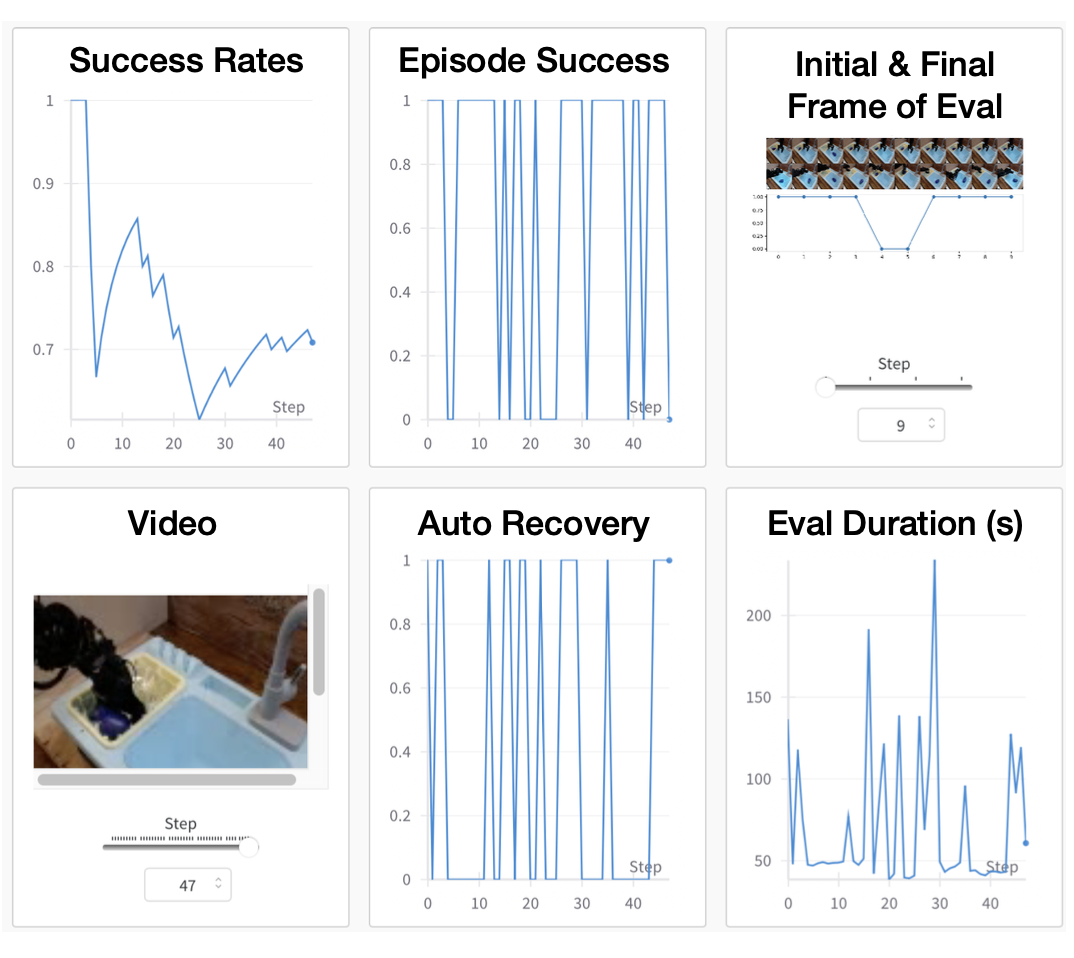
Bridge-AutoEval 系统会自动将待评估的作业排队,并在执行策略评估时向策略服务器查询机器人操作。AutoEval 系统可以全天候运行,并按照提交的顺序执行所有用户的评估作业。在策略评估结束时,AutoEval 会向用户提供可下载的部署数据和自主评估的详细性能报告,其中包含部署视频、成功率、事件持续时间以及电机重置或所需人为干预的频率。如图展示了示例报告的一部分,AutoEval 完成后即可立即在线访问。
实验细节。
任务。基于五项 Bridge V2 [77] 评估任务来评估策略:打开和关闭抽屉、将塑料茄子放入水槽和篮子中以及折叠布料。所有任务均使用 WidowX 6 自由度机械臂执行。在人工评估中,当抽屉完全关闭或打开至少 1.5 厘米时,如果茄子在回合结束时完全放入水槽或篮子中,以及布料折叠至对角线方向至少四分之一处,则视为成功。会在每回合开始时随机化茄子、抽屉和布料的初始位置。
策略。使用机器人社区最近发布的六种通才机器人策略进行评估:OpenVLA [36],一个在 Open X-Embodiment 数据集 [16] 上预训练的 7B 参数视觉-语言-动作模型 (VLA);Octo [72],一个 27M 参数的变换策略,也是在 Open X-Embodiment 上预训练的;Open 𝝅𝟎 [67],一个 3B 参数 𝜋0 VLA [11] 的开源复制品(在撰写本文时,原始𝜋0 尚未开源),在 Bridge V2 数据集上预训练的;MiniVLA [7],一个在 Bridge V2 数据集 [77] 上预训练的 3B 参数 VLA;SuSIE [10],一个将图像扩散子目标预测器与小型扩散低级策略相结合的分层策略,在 Bridge V2 上预训练的; SuSIE-LL 直接执行 SuSIE 中的目标条件行为克隆低级策略。这组策略是当前最先进的通才策略代表性样本。所有策略都包含 Bridge V2 数据集作为其训练数据的一部分,并且评估所有模型公开发布的检查点。
比较。比较多种可扩展的通才策略评估方法。具体而言,将方法 AutoEval 与先前关于机器人操作策略模拟评估的研究 SIMPLER [46] 进行比较。SIMPLER 构建真实世界环境的逼真模拟版本,并纯粹在模拟中评估策略。在本文实验中,将现有的 SIMPLER 环境重用于 Bridge 接收器环境,并按照 Li [46] 的分步指南为抽屉场景(图 6)构建了一个新的 SIMPLER 模拟环境。可变形体(例如布料场景中的布料)通常难以模拟[28, 48],而且在编写 SIMPLER 模拟器 Maniskill [56] 时,它不支持模拟可变形体,因此没有在模拟中评估布料场景。此外,与使用验证集上的均方误差(“val-MSE”)进行比较,将其作为一种可扩展的机器人策略离线评估方法。
相关文章:

AutoEval:现实世界中通才机器人操作策略的自主评估
25年3月来自 UC Berkeley 和 Nvidia 的论文“AutoEval: Autonomous Evaluation of Generalist Robot Manipulation Policies in the Real World”。 可规模化且可复现的策略评估一直是机器人学习领域长期存在的挑战。评估对于评估进展和构建更优策略至关重要,但在现…...
和__isb( ))
ARM Cortex M内存屏障指令__dsb( )和__isb( )
ARM Cortex-M 系列处理器中的 __dsb() 和 __isb() 是内存屏障指令,用于确保内存操作的顺序性和可见性,尤其在涉及外设、多核/多线程、自修改代码或关键系统配置时至关重要。 一,详细说明和典型应用场景 1. __dsb()(Data Synchron…...

deepseek热度已过?
DeepSeek的热度并没有消退,以下是具体表现: 用户使用量和下载量方面 • 日活跃用户量增长:DeepSeek已经成为目前最快突破3000万日活跃用户量的应用程序。 • 应用商店下载量:1月26日,DeepSeek最新推出的AI聊天机器人…...

使用 Datadog 和 Slack Alerts 监控 minikube
为什么要监控 minikube 集群?这是一个不错的练习,可以让你了解 DataDog 的设置过程并探索 K8s 指标产品。 本文将分享我的以下经验: 设置最新的 minikube部署示例应用程序创建 DataDog(试用)帐户使用 Helm 安装 Data…...

深入 Redis 持久化:从原理到企业级应用的全景图
🧠 什么是 Redis 持久化?为什么需要? Redis 是内存型数据库,默认所有数据都存在内存中,一旦断电,数据就会消失。为了避免重要数据丢失,Redis 提供了持久化机制,用于将内存中的数据保…...

NET模式下如何配置虚拟机的IP地址为静态的
1.查看网关: 2.找到虚拟机的网络配置文件 cd ./etc/sysconfig/network-scripts/ vim ifcfg-ens33 3.修改配置 BROWSER_ONLY"no" IPADDR192.168.122.120 NETMASK255.255.255.0 GATEWAY192.168.122.2 DNS18.8.8.8 4.重启网路服务 sudo systemctl rest…...
)
VMWare Workstation Pro17.6最新版虚拟机详细安装教程(附安装包教程)
目录 前言 一、VMWare虚拟机下载 二、VMWare虚拟机安装 三、运行虚拟机 前言 VMware 是全球领先的虚拟化技术与云计算解决方案提供商,通过软件模拟计算机硬件环境,允许用户在一台物理设备上运行多个独立的虚拟操作系统或应用。其核心技术可提升硬件…...

磐石云智能语音客服系统——技术革新引领服务新体验
在人工智能技术飞速发展的今天,企业对于智能化客户服务的需求日益增长。磐石云智能语音客服系统凭借其前沿技术架构与深度场景适配能力,正在重新定义人机交互的边界。本文将深入解析该系统如何通过技术创新实现服务效率与体验的双重突破。 一、意图识别…...

什么是iPaaS?
在当今数字化时代,企业面临着日益复杂的IT环境和不断增长的业务需求。随着云计算、微服务、物联网等技术的快速发展,企业需要更加高效、灵活且安全的方式来进行数据集成和应用集成。集成平台即服务(iPaaS)应运而生,成为…...

Vue3 中 Pinia 持久化的全面解析和最佳实践
Vue3 中 Pinia 持久化的全面解析 一、Pinia 简介 Pinia 是 Vue 的新一代状态管理库,它提供了简洁的 API,支持 Composition API,并且拥有良好的代码拆分和热更新能力。相比于 Vuex,Pinia 的代码结构更加扁平,易于理…...

蓝桥杯最后一天警告!!!
1.万能头文件 #include <bits/stdc.h> 2.一道题实在一点都不会,直接碰运气骗分 #include <bits/stdc.h> using namespace std;int main() {srand(time(0));printf("%d",rand()%101);//生成一个1到10之间的随机整数,并输出print…...

el-time-picker标签的使用
需求: 实现培训日期,用户可以选择某一天的日期,这个比较简单 <el-form-item label"培训日期" prop"startTime"><el-date-picker clearablev-model"form.startTime"type"date"placeholder…...

Mysql--基础知识点--85.1--Innodb自适应哈希索引
1. 自适应哈希索引的用途 InnoDB 的自适应哈希索引(Adaptive Hash Index, AHI)是 MySQL 数据库引擎中一项智能优化查询性能的功能。其核心作用如下: 加速等值查询 哈希索引通过哈希函数将键映射到固定位置,实现 O(1) 时间复杂度的…...

Matlab 考虑电机激励力的整车垂向七自由度的被动悬架和LQR控制
1、内容简介 Matlab 200-考虑电机激励力的整车垂向七自由度的被动悬架和LQR控制 可以交流、咨询、答疑 2、内容说明 略 3、仿真分析 略 4、参考论文 略...

统一功能处理
SpringBoot统一功能处理 本节目表 1.掌握拦截器的使用,及其原理 2.学习统一数据返回格式和统一异常处理的操作 3.了解一些Spirng的源码 文章目录 SpringBoot统一功能处理前言一、拦截器是什么?二、使用步骤1.定义拦截器2.注册配置拦截器 三,适…...

LibreOffice Writer使用01去除单词拼写判断的红色下划线
这个软件还是非常有特色的,因为大家需要office的全部功能,常常忽略了这个软件的使用体验。 csdn不是特别稳定,linux也没有什么比较好的md编辑器,所以我选择这个软件来记录我的临时博客,原因无他,它可以保存…...

JAVA基础 - 高效管理线程隔离数据结构ThreadLocalMap
欢迎光临小站:致橡树 ThreadLocalMap 是 ThreadLocal 的核心底层数据结构,负责在每个线程中存储与 ThreadLocal 实例绑定的数据。它的设计目标是高效管理线程隔离数据,同时尽量减少内存泄漏风险。以下是其核心实现细节。 数据结构与设计目标…...
暴力娱乐篇25)
每日一题(小白)暴力娱乐篇25
由题意直知,要求将给定的字符串转为符合格式的字符串。首先我们来思考一下例如02/02/02这样的数字日月肯定不用进行修改,修改后需要加上对应的年份的前两位,题目要求1960年1月1日~2059年12年12月31日,(对1960年至2059年…...

地表水-地下水耦合建模全景解析暨SWAT-MODFLOW地表与地下协同模拟及多情景专题应用
第一、模型原理与层次结构 1.1流域水循环与SWAT模型 1.2 地下水模拟与MODFLOW模型 1.3 SWAT-MODFLOW地表-地下耦合模型 1.4 QSWATMOD 插件与功能介绍 1.5 模型实现所需软件平台 第二、QGIS软件 2.1 QGIS平台 2.2 QGIS安装 2.3 QGIS界面认识 2.4 QGIS常见数据格式 2.…...

在线论坛系统
在线论坛 项目介绍项目使用技术介绍前端技术栈后端技术栈 项目运行步骤说明后端运行步骤前端运行步骤 项目使用说明用户端功能管理员端功能 部分功能说明运行截图用户端管理员端 系统源码 项目介绍 这是一个基于现代技术栈开发的在线论坛系统,提供用户交流、内容分享…...
 平滑处理的实现)
webrtc pacer模块(一) 平滑处理的实现
Pacer起到平滑码率的作用,使发送到网络上的码率稳定。如下的这张创建Pacer的流程图,其中PacerSender就是Pacer,其中PacerSender就是Pacer。这篇文章介绍它的核心子类PacingController及Periodic模式下平滑处理的基本流程。平滑处理流程中还有…...

新能源车「大三电」与「小三电」
一、大三电系统 动力电池 作为整车的能量核心,目前主流类型包括三元锂电池(NCM/NCA)和磷酸铁锂电池(LFP),前者能量密度高,后者安全性和成本优势显著。动力电池通过模组串联形成电池包…...

xlinx GT传输器学习
xlinx有2路refclk会输入到gtbank。此2路bank输入时钟是差分输入,经过IBUFDS_GTE2源语转换为单端。如下图。 从fpga外输入高速差分时钟。 差分时钟转换为单端。 单端时钟输入到gt_common模块 下图为gt内部结构图...

C++笔记之父类引用是否可以访问到子类特有的属性?
C++笔记之父类引用是否可以访问到子类特有的属性? code review! 参考笔记 1.C++笔记之在基类和派生类之间进行类型转换的所有方法 文章目录 C++笔记之父类引用是否可以访问到子类特有的属性?1.主要原因2.示例代码3.说明4.如何访问子类特有的属性5.注意事项6.总结在 C++ 中,…...

基于SSM框架的房屋租赁小程序开发与实现
概述 一个基于SSM框架开发的微信小程序房屋租赁管理系统,该项目实现了用户管理、中介管理、房源信息管理等核心功能。 主要内容 一、管理员模块功能实现 用户管理 管理员可对通过微信小程序注册的用户信息进行修改和删除操作,确保用户数据的准…...

大模型评估论文粗读“AGIEval: A Human-Centric Benchmark for Evaluating Foundation Models“
Zhong W, Cui R, Guo Y, et al. Agieval: A human-centric benchmark for evaluating foundation models[J]. arXiv preprint arXiv:2304.06364, 2023. 摘要翻译 评估大模型在处理人类层级的任务时的通用能力,是AGI发展和应用中至关重要的一环。传统的衡量标准通常依…...
:行业融资全景剖析与代码应用拓展)
程序化广告行业(76/89):行业融资全景剖析与代码应用拓展
程序化广告行业(76/89):行业融资全景剖析与代码应用拓展 大家好!在之前的文章里,咱们一起了解了程序化广告行业的发展趋势以及PC端和移动端投放的差异。今天,咱们接着深入学习,这次聚焦在程序化…...

网工基础 | 常见英文术语注解
原创:厦门微思网络 以下是一些网工专业常见的英文术语注解: IP Address(Internet Protocol Address) 互联网协议地址,是分配给连接到互联网的设备的唯一标识符,用于在网络中定位和通信。例如,“…...

【FPGA开发技巧】Modelsim仿真中,显示状态机的名称,而非编码数字
示例 被仿真的文件名为:cmd_handle.v,其中有r_st_current和r_st_next两个状态机变量。 该模块在tb文件中,被例化的名称为cmd_handle_u0 按照如下格式写:cmd_handle_u0.r_st_current 示例tb文件: timescale 1ns / 1…...

二分答案----
二分答案 - 题目详情 - HydroOJ 问题描述 给定一个由n个数构成的序列a,你可以进行k次操作,每次操作可以选择一个数字,将其1,问k次操作以后,希望序列里面的最小值最大。问这个值是多少。 输入格式 第一行输入两个正…...

Nginx 命令大全:Linux 与 Windows 系统的全面解析
Nginx 是一个高性能的 HTTP 和反向代理服务器,广泛应用于 Web 服务、负载均衡和反向代理等场景。本文将从 Linux 和 Windows 系统的角度出发,详细解析 Nginx 的常用命令,并区分两种系统之间的差异,帮助你高效地管理和维护 Nginx 服…...
)
我的计算机网络(总览篇)
总览--网络协议的角度 在一个庞大的网络中,该从哪里去了解呢?我先细细的讲一下我们访问一个网站的全部流程,当我们的电脑连上网络的时候,就会启动DHCP协议,来进行IP地址,MAC地址,DNS地址的分配…...

开源CMS的模块化设计和API接口如何具体影响其扩展性?
优秀的CMS系统都有自己主打的特点,开源CMS凭借其灵活性和低成本优势占据了市场主流地位,而模块化设计与API接口正是其扩展性的两大基石。本文将深入探讨这两大技术特性是如何影响cms的扩展性的。 一、模块化设计:功能解耦与生态繁荣的引擎 …...

【网络原理】网络通信基础
目录 一. 网络发展史 (1)局域网 (2)广域网 二. 网络基础知识 (1)IP地址 (2)端口号 (3)协议 (4)五元组 一. 网络发展史 网络的发…...

Win11系统 VMware虚拟机 安装教程
Win11系统 VMware虚拟机 安装教程 一、介绍 Windows 11是由微软公司(Microsoft)开发的操作系统,应用于计算机和平板电脑等设备 。于2021年6月24日发布 ,2021年10月5日发行 。 Windows 11提供了许多创新功能,增加了新…...

新手宝塔部署thinkphp一步到位
目录 一、下载对应配置 二、加载数据库 三、添加FTP 四、上传项目到宝塔 五、添加站点 六、配置伪静态 七、其他配置 开启监控 八、常见错误 一、打开宝塔页面,下载对应配置。 二、加载数据库 从本地导入数据库文件 三、添加FTP 四、上传项目到宝塔…...

MCU如何查看系统有没有卡死
前言:在我们调试单片机的时候,经常会遇到系统非预期运行的状况。造成系统卡死的原因有很多,主要有:野指针,数组越界,死锁,还有一些while写入的一些逻辑错误。本文就如何排查这些问题,…...

有哪些反爬机制可能会影响Python爬取视频?如何应对这些机制?
文章目录 前言常见反爬机制及影响1. IP 封禁2. 验证码3. 请求头验证4. 动态加载5. 加密与混淆6. 行为分析 应对方法1. 应对 IP 封禁2. 应对验证码3. 应对请求头验证4. 应对动态加载5. 应对加密与混淆6. 应对行为分析 前言 在使用 Python 爬取视频时,会遇到多种反爬…...

【辰辉创聚生物】提供上万种单抗/多抗及其偶联物
辰辉创聚生物致力于提供高质量的一抗(Primary Antibodies)、二抗(Secondary Antibodies)和对照抗体(Control Antibodies),支持分子生物学、免疫学及生物医学科学领域的前沿研究。我们拥有超过40…...

Google Chrome Canary版官方下载及安装教程【适用于开发者与进阶用户】
谷歌浏览器(Google Chrome)以其高性能、强扩展性和良好的用户体验深受全球用户喜爱。在其多个版本中,Chrome Canary因具备最前沿的功能测试环境,成为开发者和技术探索者的首选。如果你希望第一时间体验Google Chrome最新功能&…...

BERT - BERT 模型综述
1. BERT的两个任务 (1)Pre-Training 预训练 Masked LM (MLM) - 让模型预测被隐藏(Mask)掉的token。 例如:输入“我喜欢吃[MASK]”,Label是“我喜欢吃苹果”, 模型需要预测出“苹果”。这种…...

Vue 大文件分片上传组件实现解析
Vue 大文件分片上传组件实现解析 一、功能概述 1.1本组件基于 Vue Element UI 实现,主要功能特点: 大文件分片上传:支持 2MB 分片切割上传实时进度显示:可视化展示每个文件上传进度智能格式校验:支持文件类型、大小…...

Matlab 电机激励模型和仿真
1、内容简介 Matlab 191-电机激励模型和仿真 可以交流、咨询、答疑 2、内容说明 略 3、仿真分析 略 clc close all clear Tn 165;%电机转矩 R 0.05;%定子半径 n0 1800;% 电机转速 i 2;%额定电流 Lmin 4.95;%最小电感 k 82.5; Nr 6;%转子级数 T 60/Nr/n0;%周期 b 0…...

GPU算力优化
GPU(图形处理单元)算力优化是提升计算性能的重要任务,在深度学习、科学计算等领域有重要意义。下面从硬件层面、软件层面和算法层面为你介绍一些优化方法: 硬件层面 选择合适的 GPU:不同的 GPU 在算力、显存、功耗等…...

微服务拆分的原则、时机、方法以及常见问题
前言# 在平常情况下,技术架构会随着业务规模大小、团队人数多少、技术债积累速度等动态变化。当然,引起架构变化最主要的因素还是业务发展速度。 在以前的单体架构到微服务架构演进历程 文章2 等文章中,有一张架构演进的图,如下…...

第十八天 - ELK日志体系集成 - 自定义Logstash插件 - 练习:分布式日志分析平台
前言 在分布式系统和微服务架构中,日志管理是监控系统健康、排查故障的核心环节。ELK(Elasticsearch、Logstash、Kibana)作为业界领先的日志分析解决方案,能够实现日志采集、处理、存储与可视化的全链路管理。本文将手把手带你掌…...
全流程超详细打包)
HBuilderX中uni-app打包Android(apk)全流程超详细打包
一、Android生成打包证书 1、Android平台签名证书(.keystore)生成指南_android 签名生成-CSDN博客(如果不上架应用商店可以跳过,可以使用云端证书) 二、打开manifest.json配置基础设置 三、配置安卓应用图标 四、配置安卓启动页图片 五、…...

CTF web入门之命令执行
web29 文件名过滤 由于flag被过滤,需要进行文件名绕过,有以下几种方法: 1.通配符绕过 fla?.* 2.反斜杠绕过 fl\ag.php 3.双引号绕过 fl’‘ag’.php 还有特殊变量$1、内联执行等 此外 读取文件利用cat函数,输出利用system、passthru 、echo echo `nl flag.php`; ec…...

安宝特案例 | 某户外机房制造企业应用AR+作业流,规范制造过程,记录施工节点,保障交付质量
行业特点:产品客制化、依赖人工,工程量大、细节多,验收困难 户外通讯机房无疑是现代工业社会的“信息心脏”,承载着信息交换、传输与处理的重任。建设一座质量过关的户外通讯机房是保障通信稳定运行的基石。 通常建设一个户外通信…...

学习MySQL的第八天
海到无边天作岸 山登绝顶我为峰 一、数据库的创建、修改与删除 1.1 引言 在经过前面七天对于MySQL基本知识的学习之后,现在我们从基本的语句命令开始进入综合性的语句的编写来实现特定的需求,从这里开始需要我们有一个宏观的思想&…...