OpenCv(七)——模板匹配、打包、图像的旋转
目录
一、模板匹配
模板匹配原理
1、单模板之间的匹配
(1)读取并显示待匹配的图片和模板图片
(2)模板匹配并绘制匹配位置的外接矩形
(3)显示最终的效果
2、模板与多个对象匹配,仅匹配当前的模板
(1)读取并显示待匹配的图片和模板灰度图片
(2) 模板匹配
(3)设置阈值
3、匹配相同模板的全角度
(1)读取并显示待匹配的图片和模板灰度图片,旋转模板得到所有的能匹配到的模板。
(2)模板匹配并绘制外接矩形
二、打包与np.where()函数
1、np.where()函数
(1) 作为条件选择器(类似三元表达式)
(2) 作为条件索引获取器(省略 x 和 y)
2、打包与解包
(1)打包
(2)解包
3、反转列表
三、图像的旋转
1、使用numpy方法实现旋转
(1)顺时针旋转90度
(2)逆时针旋转90度
2、使用opencv的方法实现图像旋转
(1)顺时针旋转90度
(2)逆时针旋转90度
(3)旋转180度
一、模板匹配
模板匹配是一种用于查找与模板图像(补丁)匹配(相似)的图像区域的技术。
为了识别匹配区域,我们必须通过滑动来将模板图像与源图像进行比较:
一次移动一个像素(从左到右,从上到下)。在每个位置,都会计算一个度量(度量计算公式),以便它表示该位置的匹配“好”或“坏”程度

模板匹配原理
匹配原理:模板从图片的左上角逐一进行匹配,针对每一个匹配位置(位置坐标是模板左上角坐标),都会根据matchTemplate()函数设置的计算方法得到一个对应的得分值,不同的匹配方法数值大小的效果是不同的,找到最优的匹配结果返回。
函数API:
cv2.matchTemplate(image, templ, method, result=None, mask=None)
image:待搜索图像
templ:模板图像
method:计算匹配程度的方法,可以有:
TM_SQDIFF 平方差匹配法:该方法采用平方差来进行匹配;匹配越好,值越小;匹配越差,值越大。
TM_CCORR 相关匹配法:该方法采用乘法操作;数值越大表明匹配程度越好。
TM_CCOEFF 相关系数匹配法:数值越大表明匹配程度越好。
TM_SQDIFF_NORMED 归一化平方差匹配法,匹配越好,值越小;匹配越差,值越大。
TM_CCORR_NORMED 归一化相关匹配法,数值越大表明匹配程度越好。
TM_CCOEFF_NORMED 归一化相关系数匹配法,数值越大表明匹配程度越好。
返回匹配结果的矩阵,其中每个元素表示该位置与模板的匹配程度
如果想了解matchTemplate的method的具体计算方法和matchTemplate的基础知识,可以前往OpenCv的官网查看更详细的知识OpenCV: Template Matching。
1、单模板之间的匹配
可乐模板匹配代码
(1)读取并显示待匹配的图片和模板图片
kele = cv2.imread('kele.png')
template = cv2.imread('template.png')
cv2.imshow('kele',kele)
cv2.imshow('template',template)
cv2.waitKey(0)
(2)模板匹配并绘制匹配位置的外接矩形
cv2.minMaxLoc()可以获取矩阵中的最小值和最大值,以及最小值的索引号和最大值的索引号
h, w = template.shape[:2] #获取模板图片的高和宽res = cv2.matchTemplate(kele, template, cv2.TM_CCOEFF_NORMED) #返回匹配结果的矩阵,其中每个元素表示该位置与模板的匹配程度
# cv2.minMaxLoc可以获取矩阵中的最小值和最大值,以及最小值的索引号和最大值的索引号
min_val, max_val, min_loc, max_loc = cv2.minMaxLoc(res) # 最小值、最大值、最小值位置、最大值位置
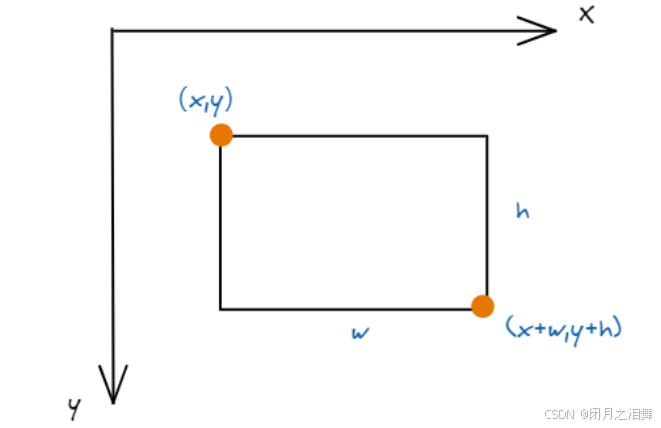
top_left = max_loc
bottom_right = (top_left[0] + w, top_left[1] + h) #获得图片右下角坐标
kele_template = cv2.rectangle(kele, top_left, bottom_right, (0, 255, 0), 2) # 绘制矩形
(3)显示最终的效果
cv2.imshow('kele_template', kele_template)
cv2.waitKey(0)

2、模板与多个对象匹配,仅匹配当前的模板
模板:

待匹配对象:

(1)读取并显示待匹配的图片和模板灰度图片
import cv2
import numpy as np
#(这里用到了两种方法来将彩色图片转化为灰度图)img_rgb=cv2.imread('../data/tuall.jpg')
img_gray=cv2.cvtColor(img_rgb,cv2.COLOR_BGRA2GRAY)
tuone=cv2.imread('../data/tuone.jpg',0)(2) 模板匹配
h,w=tuone.shape[:2]
# 使用模板匹配方法进行模板匹配
res=cv2.matchTemplate(img_gray,tuone,cv2.TM_CCOEFF_NORMED)(3)设置阈值
np.where()函数:过滤出符合条件的数值。
阈值设置原理:
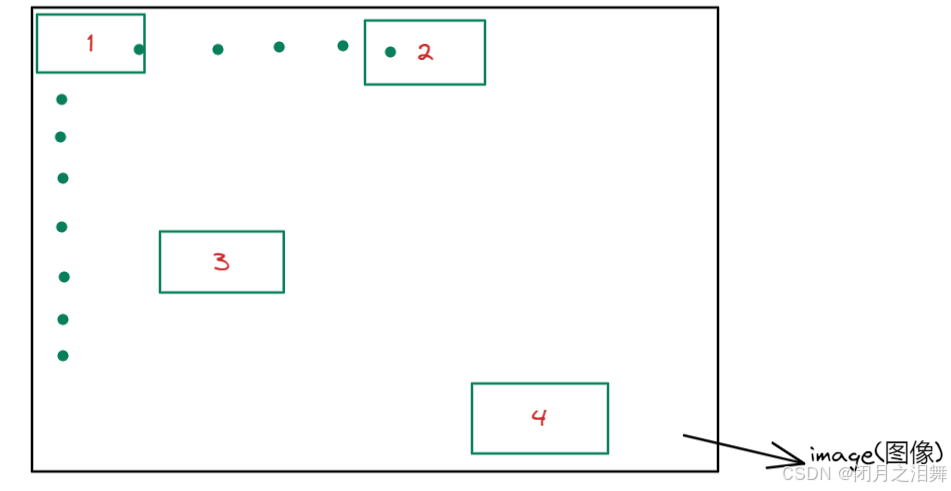
在进行多对象匹配时,常常要设置阈值保证能够完全框选到对象,当阈值设置为0.9时,所有满足大于0.9的外接矩形都会被绘制出来,如果这个阈值数据设置的更小,那么符合条件的位置就越多,表现在图上的特征就是有更多的框,框的线更粗。
反转:
loc的数据,下面表示的是行和列,但是在opencv中行时用y表示,列时用x表示,所以按照x,y表示的话,下面给出的数据是,(y,x),绘制矩形时应该是x和y,所以这里要做反转。

# 设置匹配阈值
threshold=0.9
#获取匹配结果中所有符合阈值的点的坐标
loc=np.where(res>=threshold) #如果得分大于阈值,返回大于阈值的索引for pt in zip(*loc[::-1]): #反转打包#在原图上绘制矩形框cv2.rectangle(img_rgb,pt,(pt[0]+w,pt[1]+h),(0,255,0),1)cv2.imshow('1',img_rgb)
cv2.waitKey(0)
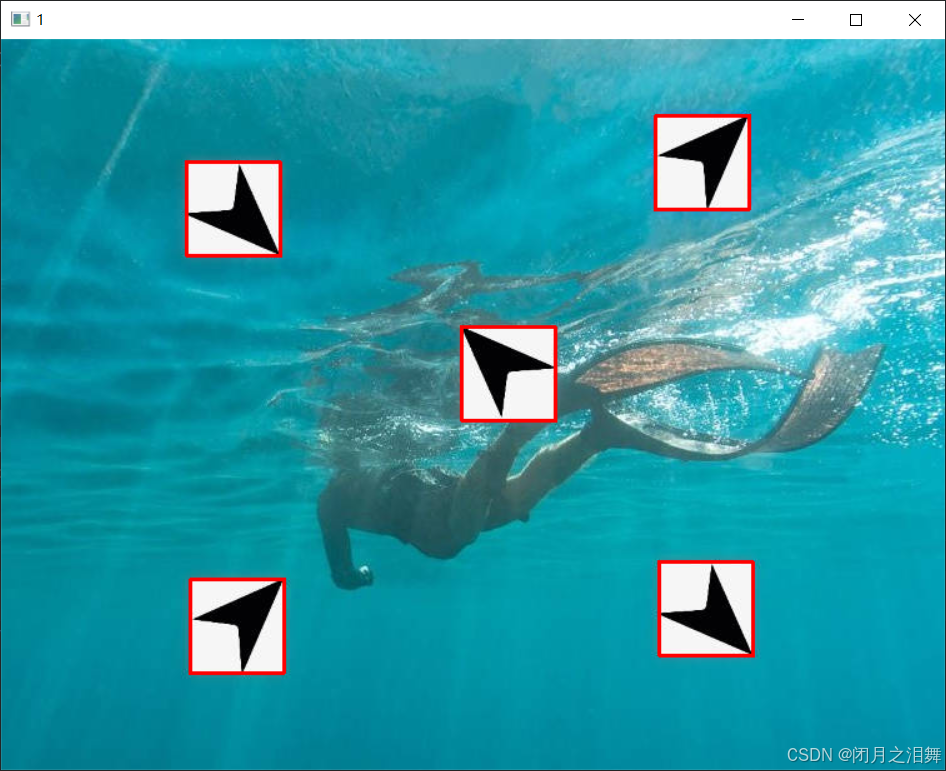
3、匹配相同模板的全角度
待匹配的图像上有很多个可以匹配上的图,但是匹配的模板需要旋转才能匹配上
将图片上的所有的图像模板都匹配上
(1)读取并显示待匹配的图片和模板灰度图片,旋转模板得到所有的能匹配到的模板。
import cv2
import numpy as npimg_rgb=cv2.imread('../data/tuall.jpg')
img_gray=cv2.cvtColor(img_rgb,cv2.COLOR_BGRA2GRAY)tuone=cv2.imread('../data/tuone.jpg',0)
tuone1=cv2.rotate(tuone,cv2.ROTATE_90_CLOCKWISE) #顺时针旋转90度
tuone2=cv2.rotate(tuone,cv2.ROTATE_90_COUNTERCLOCKWISE) #逆时针旋转90度
tuone3=cv2.rotate(tuone,cv2.ROTATE_180) #旋转180度
tuones=[tuone,tuone1,tuone2,tuone3] (2)模板匹配并绘制外接矩形
h,w=tuone.shape[:2]
# 使用模板匹配方法进行模板匹配
for tu in tuones:res=cv2.matchTemplate(img_gray,tu,cv2.TM_CCOEFF_NORMED)# 设置匹配阈值threshold=0.9#获取匹配结果中所有符合阈值的点的坐标loc=np.where(res>=threshold)for pt in zip(*loc[::-1]):#在原图上绘制矩形框cv2.rectangle(img_rgb,pt,(pt[0]+w,pt[1]+h),(0,0,255),1)cv2.imshow('1',img_rgb)
cv2.waitKey(0)
二、打包与np.where()函数
1、np.where()函数
(1) 作为条件选择器(类似三元表达式)
语法
np.where(condition, x=None, y=None)
condition:布尔数组或表达式,用于指定条件。x, y(可选):当条件为True时返回x对应位置的元素,为False时返回y对应位置的元素。- 返回值:形状与
condition相同的数组,元素来自x或y。
示例:
import numpy as npa = np.array([1, 2, 3, 4, 5])
# 将大于 3 的元素替换为 10,否则保持原值
result = np.where(a > 3, 10, a)
print(result) # 输出: [ 1 2 3 10 10]# 更复杂的条件(结合逻辑运算)
b = np.array([10, 20, 30, 40])
condition = (a > 2) & (b < 35) # 同时满足两个条件
result = np.where(condition, a * 2, b // 2)
print(result) # 输出: [ 2 4 6 20](仅前3个元素满足条件,最后一个不满足,取 b//2=20)(2) 作为条件索引获取器(省略 x 和 y)
语法
np.where(condition)
- 作用:返回满足条件
condition的元素的索引(以元组形式表示,每个元素对应数组的一个维度)。 - 返回值:元组
(ind1, ind2, ..., indn),其中indi是第i维满足条件的索引数组。
示例:
a = np.array([1, 2, 3, 4, 4, 5])
# 获取值为 4 的元素的索引
indices = np.where(a == 4)
print(indices) # 输出: (array([3, 4]),)(一维数组,索引为 3 和 4)# 二维数组示例
b = np.array([[1, 2, 3], [4, 5, 6], [7, 8, 9]])
condition = b > 5
indices = np.where(condition)
print(indices) # 输出: (array([1, 2, 2]), array([2, 0, 1, 2])),对应行和列的索引2、打包与解包
(1)打包
a=[1,2,3]
b=[4,5,6]# 使用zip将他们按位置进行配对
zipped=zip(a,b)
print(list(zipped))
# 输出:[(1,4),(2,5),(3,6)](2)解包
zip(*iterables)将多个可迭代对象(列表、元组)进行解压操作
# 假设我们已经有了一个打包好的zip对象
zipped=zip(a,b)# #使用*运算符解包,得到转置的结果
unzipped=zip(*zipped)3、反转列表
假设 loc = [(1, 2), (3, 4), (5, 6)](3 个坐标点):
- 反转列表:
loc[::-1] = [(5, 6), (3, 4), (1, 2)]
三、图像的旋转
1、使用numpy方法实现旋转
读取图片并重设图片大小
import cv2
import numpy as npimg=cv2.imread("../data/kele.png")
img=cv2.resize(img,dsize=None,fx=0.5,fy=0.5)cv2.imshow('yuantu',img)(1)顺时针旋转90度
# 旋转90度,k=-1,表示顺时针旋转90度
rotated_image1=np.rot90(img,k=-1)
cv2.imshow('totated_image1',rotated_image1)(2)逆时针旋转90度
# 旋转90度,k=1,表示逆时针旋转90度
rotated_image2=np.rot90(img,k=1)
cv2.imshow('retated_image',rotated_image2)
cv2.waitKey(0)
cv2.destroyAllWindows()2、使用opencv的方法实现图像旋转
(1)顺时针旋转90度
rotated_image=cv2.rotate(img,cv2.ROTATE_90_CLOCKWISE) #顺时针旋转90
cv2.imshow('shun90',img)(2)逆时针旋转90度
rotated_image1=cv2.rotate(img,cv2.ROTATE_90_COUNTERCLOCKWISE) #逆时针旋转90度
cv2.imshow('ni90',rotated_image1)(3)旋转180度
rotated_image2=cv2.rotate(img,cv2.ROTATE_180) #旋转180度
cv2.imshow('180',rotated_image2)
cv2.waitKey(0)相关文章:
——模板匹配、打包、图像的旋转)
OpenCv(七)——模板匹配、打包、图像的旋转
目录 一、模板匹配 模板匹配原理 1、单模板之间的匹配 (1)读取并显示待匹配的图片和模板图片 (2)模板匹配并绘制匹配位置的外接矩形 (3)显示最终的效果 2、模板与多个对象匹配,仅匹配当前…...

汽车售后诊断 ODX 和 OTX 对比分析报告
一、引言 在汽车行业不断发展的当下,汽车售后诊断技术对于保障车辆性能、维护车主权益以及提升汽车品牌服务质量起着至关重要的作用。随着汽车电子化程度的不断提高,售后诊断所涉及的数据和流程愈发复杂,这就促使行业需要更加标准化、高效化…...

关于图卷积
深入理解神经网络中的图卷积 一、为什么需要图卷积(动机) 在图结构中,比如: 社交网络(节点是人,边是朋友关系)分子结构(节点是原子,边是化学键)知识图谱&a…...

Meta LLaMA 4:对抗 GPT-4o 与 Claude 的开源王牌
2025 年 4 月,Meta 正式发布了 LLaMA 4 系列的首批两款模型。 这两款模型模型分别是:LLaMA 4 Scout 与 LLaMA 4 Maverick,均采用了 专家混合架构(Mixture-of-Experts, MoE)。 据 Meta 表示,这是首次有 …...

如何进行SQL调优
如何进行SQL调优 SQL 调优是优化数据库查询性能的过程,目的是减少查询的执行时间,提高数据库系统的整体效率。SQL 调优的技巧和方法可以针对不同的数据库管理系统(DBMS)有所不同,但基本的原则和步骤是相似的。以下是一…...

WAF防护规则配置技巧与企业级安全实践指南
面对日益复杂的Web应用攻击,WAF规则配置直接决定防护体系的有效性。本文深度解析规则优先级编排、误报消减策略、智能学习机制等17项关键技术,结合金融行业API攻击案例与Gartner最新防御框架,为企业提供可落地的WAF优化路径。 WAF规则引擎的…...

第16届蓝桥杯单片机模拟试题Ⅱ
试题 代码 sys.h #ifndef __SYS_H__ #define __SYS_H__#include <STC15F2K60S2.H> //ds1302.c extern unsigned char time[3]; void w_ds1302(); void r_ds1302(); //iic.c float v_adc(unsigned char addr); //sys.c extern float light_v; extern float rb2_v; exte…...

机器学习——ROC曲线、PR曲线
一、ROC曲线简介 1.1 ROC曲线的构成 1.横轴(假正率,FPR): 表示负样本被错误分类为正的比例(越小越好) 2.纵轴(真正率,TPR,即召回率): 表示正样…...

Flutter之交互事件
目录: 1、点击事件标准案例1.1、效果图2.1、代码实现 1、点击事件标准案例 1.1、效果图 2.1、代码实现 class FavoriteWidget extends StatefulWidget {const FavoriteWidget({super.key});overrideState<FavoriteWidget> createState() > _FavoriteWidge…...

深入解析Spring Boot自动装配:原理、设计与最佳实践
引言 Spring Boot作为现代Java开发中的一股清流,凭借其简洁、快速和高效的特性,迅速赢得了广大开发者的青睐。而在Spring Boot的众多特性中,自动装载(Auto-configuration)无疑是最为耀眼的明珠之一。本文将深入剖析Sp…...

【责任链】模式解决流程中多个接口的流程问题
业务需求 整体流程有5步骤,每个步骤调用一个接口,每个接口成功才能进行下一步。如a->b->c->d->e, 比如入学报到 a:报班,根据名字生成学号uid b:根据学号分配班级获取班级编号cid c:…...
)
excel常见错误包括(#N/A、#VALUE!、#REF!、#DIV/0!、#NUM!、#NAME?、#NULL! )
目录 1. #N/A2. #VALUE!3. #REF!4. #DIV/0!5. #NUM!6. #NAME?7. #NULL!8.图表总结 在 Excel 中,可能会遇到以下常见的错误值,每个都有特定的含义和成因: 1. #N/A 含义: 表示“Not Available”(不可用)。…...

【湖南大学】2025我们该如何看待DeepSeek
大家好,我是樱木。 DeepSeek 官方网站:https://www.deepseek.com/ 一、DeepSeek 到底是什么? TA 到底厉害在哪里? 故事从 ChatGPT 说起 去年我们看到 Open AI 发布ChatGPT 后,全球的注意力到了 AI 身上。 我们来拆…...

RAG中构建个人知识库
1. 添加本地模型 1.1 查看本地模型 ollama list1.2 ragflow添加本地模型 1.3 系统模型配置 2. 构建知识库 2.1 准备知识库素材 2.2 配置知识库 2.3 知识库绑定素材文件 上传文件素材 - 解析文件 3. 构建交互系统 3.1 配置助理 3.2 完善提示词 3.3 设置模型参数 4. 体验效…...
 中,apiserver 的 IIP和 VIP的区别)
在 Kubernetes (k8s) 中,apiserver 的 IIP和 VIP的区别
在 Kubernetes (k8s) 中,apiserver 的 IIP(Internal IP) 和 VIP(Virtual IP) 是与集群网络通信和高可用性设计相关的两个重要概念。 IIP(Internal IP) 定义: IIP 是 apiserver 所在…...

OpenCV--图像形态学
在图像处理领域,图像形态学是一种基于形状进行图像分析的有力工具,广泛应用于图像分割、特征提取、边缘检测、图像降噪等多个方面。借助 OpenCV 这个强大的计算机视觉库,我们可以轻松实现各种图像形态学操作。本文将深入探讨图像形态学的基本…...

智慧医疗数据集
WiNGPT2 更新时间:2024-11-29 访问地址: GitHub 描述: WiNGPT是一个基于GPT的医疗垂直领域大模型,旨在将专业的医学知识、医疗信息、数据融会贯通,为医疗行业提供智能化的医疗问答、诊断支持和医学知识等信息服务,…...
)
3D激光轮廓仪知识整理(待补充)
文章目录 1.原理和应用场景1.1 相机原理1.1.1 测量原理1.1.2 相机激光器1.1.3 沙姆镜头1.1.4 相机标定1.1.5 中心线提取 1.2 应用场景1.2.1 测量相关应用1.2.2 缺陷检测相关易用 2.相机参数介绍及选型介绍2.1 成像原理2.2 原始图成像2.3 生成轮廓图2.4 相机规格参数2.4.1 单轮廓…...

算法思想之双指针
文章目录 双指针字符串序列判定字符串所有整数最小和服务交换接口失败率分析分披萨最多团队 双指针 双指针是指在解决问题时使用两个指针,通常分别指向数组或字符串中的不同位置,通过移动这两个指针来解决问题的一种技巧。双指针技巧常用于解决数组、链…...

Windows环境下PyCharm 配置miniforge
问题描述. 目前Anconda python 环境管理软件,已非常臃肿。为了替代该软件,可以使用miniforge软件来代替。 1. 安装windows miniforge软件 (1) 下载网站:https://github.com/conda-forge/miniforge?tabreadme-ov-file 从网址下载ÿ…...

C语言基础18
内容提要 构造类型 结构体 共用体/联合体 枚举 typedef 构造类型 数据类型 基本类型/基础类型 整型 短整型:short [int] -- 2字节 基本整型:int -- 4字节 长整型:long [int] -- 32位4字节/64位8字节 长长整型:long long…...

Docker部署Jenkins服务
文章目录 1.下载Jenkins服务2.部署Java21(可选)2.1 安装Java21 3.Maven3.9.9安装4.启动Jenkins5.初始化Jenkins5.1 入门5.2 安装推荐的插件5.3 创建第一个管理员用户5.4 实例配置5.5 Jenkins已就绪5.6 开始使用Jenkins5.7 重启Jenkins 6.配置Jenkins6.1 …...

【题解-Acwing】798. 差分矩阵
题目:798. 差分矩阵 题目描述 输入一个n行m列的整数矩阵,再输入q个操作,每个操作包含五个整数 x1,y1,x2,y2,c,其中 (x1,y1)和 (x2,y2)表示一个子矩阵的左上角坐标和右下角坐标。 每个操作都要将选中的子矩阵中的每个元素的值加…...

linux环境下的硬盘分区格式化工具介绍 fdisk,gdisk,parted,cfdisk,cgdisk,sfdisk,gparted 笔记250407
linux环境下的硬盘分区格式化工具介绍 fdisk,gdisk,parted,cfdisk,cgdisk,sfdisk,gparted 笔记250407 以下是 Linux 系统中常用的 硬盘分区与格式化工具,涵盖命令行和图形界面工具,按功能分类整理: 一、分区管理工具 1. 命令行工具 工具功能…...

Ubuntu 24.04 LTS系统安装RTX 4090显卡驱动和cuda并部署ollama下载DeepSeek模型【自用详细版】
自己捣鼓玩玩哈,正好有机子 1. 安装驱动前的系统配置工作 卸载原有驱动并禁用nouveau sudo apt remove --purge nvidia*sudo cp /etc/modprobe.d/blacklist.conf /etc/modprobe.d/blacklist.conf.backup //备份文件sudo vim /etc/modprobe.d/blacklist.conf //修…...

FogFL: Fog-Assisted Federated Learning for Resource-Constrained IoT Devices
摘要 提示:这里可以添加系列文章的所有文章的目录,目录需要自己手动添加 -在本文中,我们提出了一个支持雾的联邦学习框架–FogFL–来促进资源受限的物联网环境中延迟敏感应用的分布式学习。联邦学习(FL)是一种流行的分…...
——RTCP协议简介(上))
音视频入门基础:RTCP专题(2)——RTCP协议简介(上)
一、引言 本文对RTCP协议进行简介。在简介之前,请各位先下载RTCP的官方文档《RFC 3550》。《RFC 3550》总共有89页。本文下面所说的“页数”是指在pdf阅读器中显示的页数: 二、RTCP协议简介 本段内容对应《RFC 3550》的第6节。根据《RFC 3550》第17页&…...
)
oklink js逆向(入口定位)
分析api请求,定位参数 X-Apikey 搜索关键字apikey,发现结果太多 结合搜索结果,搜索关键字 apikey(,只找到5个 断点后定位 可见使用了字符串混淆,所以搜索不到 x-apikey 还可以通过搜索 headers,追踪调用栈的…...

go原子操作和锁的区别是什么?
在Go语言中,原子操作和锁都是用于实现并发编程的同步机制,但它们的工作方式和适用场景有所不同。下面是它们的主要区别: 1. 原子操作(Atomic Operations) 定义:原子操作是一种不可分割的操作,…...

QtConcurrent
以下是 QtConcurrent 的一些常见用法示例: QtConcurrent::run QtConcurrent::run 是最常用的函数,用于在单独的线程中运行一个函数。 运行普通函数 #include <QtConcurrent> #include <QDebug> #include <QThread>void myFunction…...

Git 仓库在内网与 Gitee 间迁移及同步记录
Git 仓库在内网与 Gitee 间迁移及同步记录 在软件开发过程中,常常会遇到需要将代码仓库进行迁移或同步的情况。近期我就碰到了要把 Gitee 代码仓库移植到内网代码仓库,并且后续还得进行同步的需求。这里把整个过程记录下来,方便以后自己参考…...

如何保证mysql和redis的数据一致性
保证 MySQL 和 Redis 的数据一致性是分布式系统中常见的挑战,因为 Redis 作为缓存层,可能存在与底层数据库数据不一致的情况。以下是几种常用的方案及其优缺点对比: 1. 缓存更新策略 (1) Cache-Aside Pattern(旁路缓存模式&#…...
)
Java学习——day23(反射的对象创建与方法调用)
文章目录 1. 使用反射实例化对象1.1 利用无参构造函数创建对象1.2利用带参构造函数创建对象 2.通过反射调用对象方法2.1 调用公共方法2.2 调用私有方法(需设置访问权限)3. 访问和修改对象的属性3.1 公共属性3.2 私有属性 4. 实践任务4.1工厂类 SimpleFac…...

遇到无法连接香港服务器可能是什么原因导致的呢
遇到无法连接香港服务器的情况时,别急着重启或联系客服,先搞清楚到底是哪里断了链条。问题可能出在服务器本身,也可能是你的本地网络、路由路径、DNS、甚至运营商的“干预”。以下是常见的几个可能原因,建议你可以逐一排查&#x…...
)
Python----计算机视觉处理(Opencv:道路检测完整版:透视变换,提取车道线,车道线拟合,车道线显示,)
Python----计算机视觉处理(Opencv:道路检测之道路透视变换) Python----计算机视觉处理(Opencv:道路检测之提取车道线) Python----计算机视觉处理(Opencv:道路检测之车道线拟合) Python----计算机视觉处理࿰…...

javaweb自用笔记:Maven分模块设计与开发、Maven继承与聚合、Maven私服
Maven分模块设计与开发 Maven继承与聚合 继承 版本锁定 dependencies引入依赖,dependencyManagement不代表依赖被引入,如果要使用dependencyManagement下的依赖,还需要在dependencies里面定义 聚合 如果没有用聚合,将这个项目打…...

在PyCharm中出现 **全角字符与非英文符号混合输入** 的问题
在PyCharm中出现 全角字符与非英文符号混合输入 的问题(如 124345dfs$¥cvd)࿰…...

数字身份DID协议:如何用Solidity编写去中心化身份合约
本文提出基于以太坊的自主主权身份(SSI)实现方案,通过扩展ERC-734/ERC-735标准构建链上身份核心合约,支持可验证声明、多密钥轮换、属性隐私保护等特性。设计的三层架构体系将身份控制逻辑与数据存储分离,在测试网环境…...

Linux的RPM包管理详解
Linux的RPM包管理详解 引言 RPM(Red Hat Package Manager)是Linux系统中一种重要的软件包管理工具,它以“.rpm”为扩展名,广泛应用于基于Red Hat的Linux发行版,如CentOS、Fedora、openSUSE等。RPM包不仅简化了软件包…...

其它理论原则
ABC理论 假设(Assumption)影响行为(Behavior),行为最终影响结果(Consequence)。 如果产品经理认为同事是一个不讲道理的人,那么产品经理在和他交流时就会产生抵触的行为,…...
)
C++中的类和对象(上)
1 类的定义 1.1 类定义的格式 1 class为定义类的关键字,Stack为类的名字,{}中为类的主体,注意类定义结束时后面分号不能省 略》。类体中内容称为类的成员:类中的变量称为类的属性或成员变量; 类中的函数称为类的方法或者成员函数…...

LLaMA-Factory 数据集成从入门到精通
一、框架概述 LLaMA-Factory 框架通过Alpaca/Sharegpt双格式体系实现多任务适配,其中Alpaca专注结构化指令微调(含SFT/DPO/预训练),Sharegpt支持多角色对话及多模态数据集成。核心配置依托 dataset_info.json 实现数据源映射、格…...

高级:JVM面试题深度剖析
一、引言 在Java技术面试中,JVM(Java虚拟机)相关知识是考察重点之一。深入理解JVM的内存模型、垃圾回收机制、类加载机制等,不仅能帮助开发者优化Java应用性能,还能在面试中展现深厚的技术功底。本文将针对这些高频知…...

Spring MVC 中 @ResponseBody 注解深度使用教程
一、注解核心作用 ResponseBody 是 Spring MVC 中处理 响应体内容 的核心注解,主要功能: 跳过视图解析器:直接返回数据而非视图名称自动数据转换:根据返回值类型自动转换响应格式(JSON/XML/纯文本)RESTfu…...
)
数据结构第一轮复习--第七章查找(包含课程代码)
基于数组实现顺序查找代码 //顺序查找的实现 typedef struct{ //查找表的数据结构(顺序表) ElemType *elem; //指向开辟的动态数组基址 (起始地址) int TableLen; //表的长度 }SSTable; //顺序查找 int Search_Seq(SSTable ST…...

Springboot JPA 集成ShardingSphere
Spring Boot集成JPA与ShardingSphere可通过以下步骤实现分库分表功能,需重点关注依赖配置、分片规则定义及JPA适配问题: 一、依赖配置 1. 引入核心依赖 在pom.xml中添加ShardingSphere和JPA相关依赖: <!-- ShardingSphere JDBC --&…...

详细介绍javaspringboot操控redis的高级特性1. 事务支持2. 发布/订阅3. Pipeline批量操作
Spring Boot 对 Redis 的操作提供了丰富的高级特性,以下是对事务支持、发布 / 订阅、Pipeline 批量操作的详细介绍: 事务支持 原理:Redis 事务是一个单独的隔离操作,它可以包含多个命令,这些命令要么全部执行&#x…...
)
第一次3D打印,一个简单的小方块(Rhino)
一、建模 打开犀牛,我们选择立方体 我们点击上册的中心点 输入0,然后回车0 而后我们输长度:10,回车确认 同样的,宽度10 高度同样是10 回车确认后,我们得到一个正方形 二、导出模型 我们选择文件—>保存…...

数据分享:汽车测评数据
说明:如需数据可以直接到文章最后关注获取。 1.数据背景 Car Evaluation汽车测评数据集是一个经典的机器学习数据集,最初由 Marko Bohanec 和 Blaz Zupan 创建,并在 1997 年发表于论文 "Classifier learning from examples: Common …...
笔记250406)
硬盘分区格式之GPT(GUID Partition Table)笔记250406
硬盘分区格式之GPT(GUID Partition Table)笔记250406 GPT(GUID Partition Table)硬盘分区格式详解 GPT(GUID Partition Table)是替代传统 MBR 的现代分区方案,专为 UEFI(统一可扩展固…...