STM32江科大----IIC
声明:本人跟随b站江科大学习,本文章是观看完视频后的一些个人总结和经验分享,也同时为了方便日后的复习,如果有错误请各位大佬指出,如果对你有帮助可以点个赞小小鼓励一下,本文章建议配合原视频使用❤️
如果你也正在学习STM32可以订阅本专栏,后续将不定期更新( ˘ ³˘)❤️
如有侵权,请私信联系删除

文章目录
- 前言
- 理论部分
- 有关IIC理论部分
- MPU6050
- 参数和简介
- 硬件电路
- 内部框图
- IIC通讯外设
- IIC外设简介
- IIC框图
- IIC基本结构(一主多从)
- 时序---主机发送
- 时序---主机接受
- 软件和硬件的波形对比(上为软件,下为硬件)
- 代码部分
- 软件模拟iic
- 硬件模拟iic
前言
- 弄清IIC时序结构以及硬件要求
- MPU6050的基本参数和大概使用方法
- 一般情况下软件实现iic比硬件更为常用,但是硬件也有其优势,比如:可节省软件资源,可实现完整的多主机通讯模型,时序波形规整,通讯速率快,一般用于对性能指标要求高,软件iic则更为灵活,比如iic总线理论上可无限开辟,而硬件iic外设有限
理论部分
有关IIC理论部分
有关iic的理论知识可以看一下我的这篇文章iic的时序结构,就不做多余赘述了,个人觉得up在32里面讲iic比51清楚,有兴趣的小伙伴还是建议看一下32的iic原视频
MPU6050
参数和简介
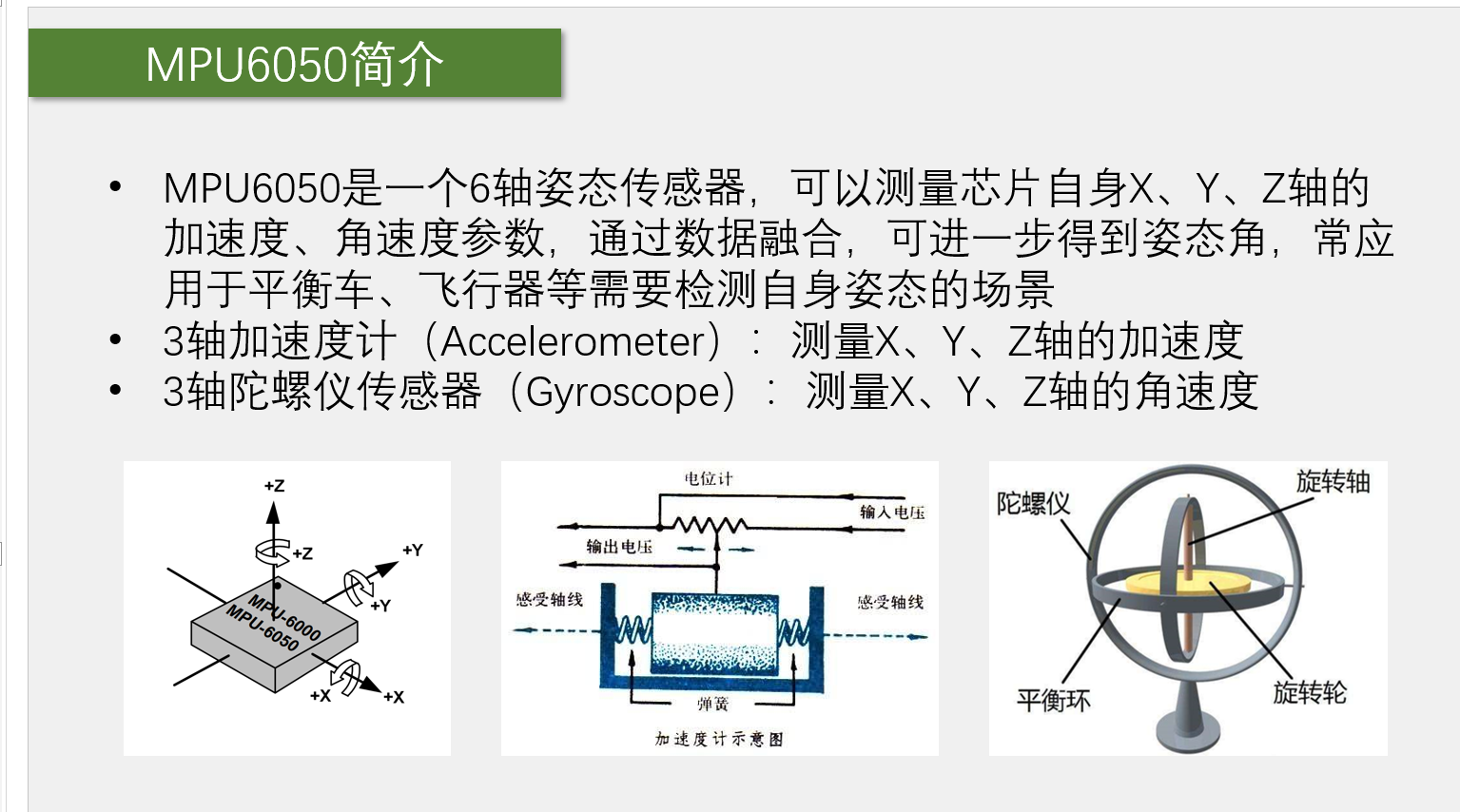
- 理论上陀螺仪传感器是可以直接测量处具体角度的,但这里只能测量出角加速度,最后的角度的话需要另外计算,比如对角速度积分
加速度计具有静态稳定性,不具有动态稳定性,内部工作原理其实就是F=ma,m在里面为一个已知小球重量,用类似于弹簧测力计的东西测量出小球对一个面的压力,用压力除以m,就是该面方向上的加速度陀螺仪计具有动态稳定性,不具有静态稳定性,因为静止时角速度值会因为噪声而无法完全归零,经过积分的不断累积,这个小噪声就会导致积分会产生一个角度的缓慢漂移,最后就不准确
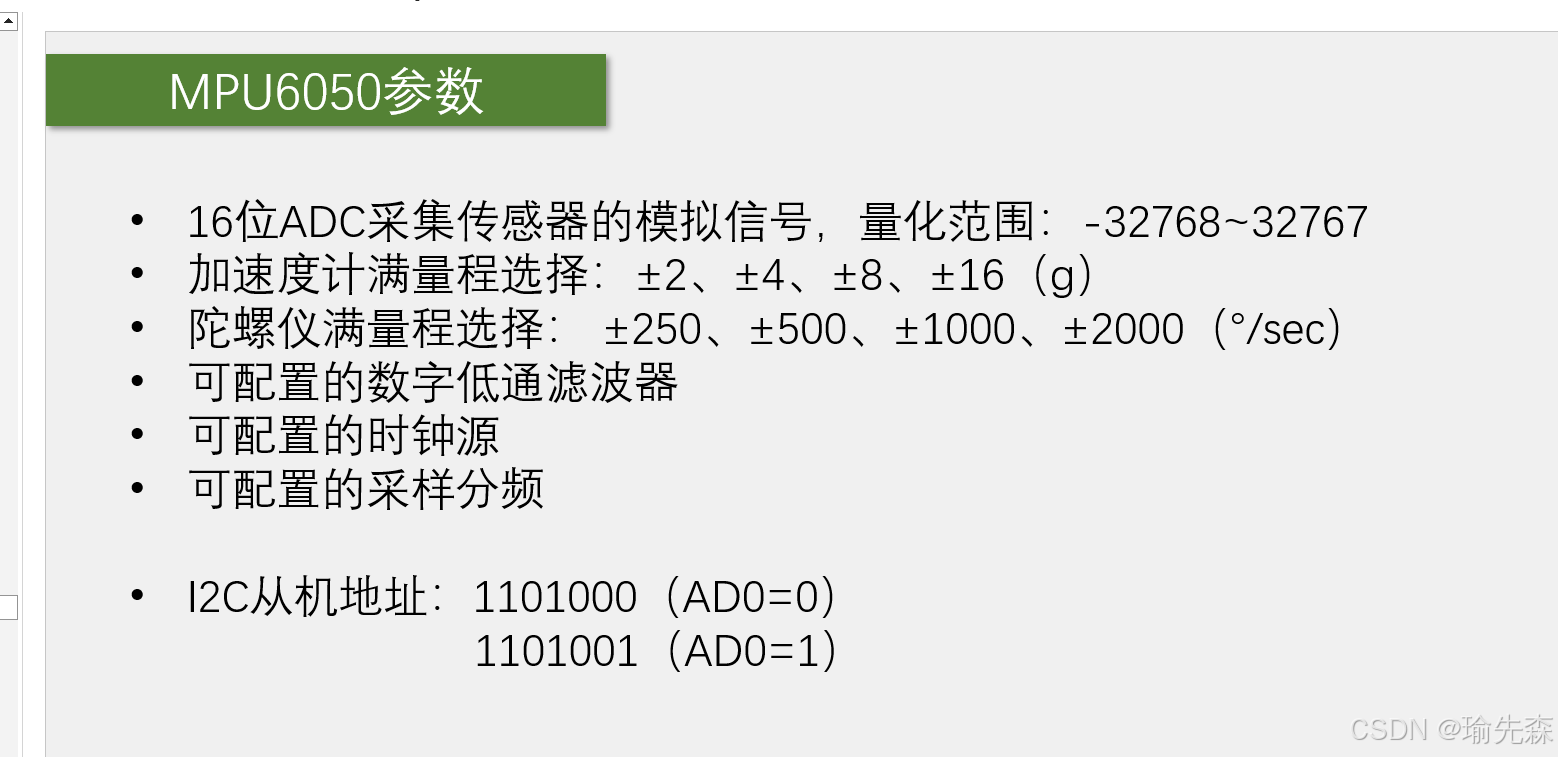
- 16位的ADC就是2^16=65536,但是由于加速度计和陀螺仪计都是存在方向的,所以就平分65536,一半为正值,一半为负值
- 不同量程的选择,测量范围也会变化,量程越大测量范围越大,但是分辨率会变低
- 从机地址有两种表示方法,一种是将7位作为从机地址,那么110 1000就是0x68,那么要加上读写位就是0x68 | 读写位,也可以表示为11010000,那么就是加上读写位表示从机地址,也就是0xD0,那么0xD0就是写地址,0xD1就是读地址
硬件电路
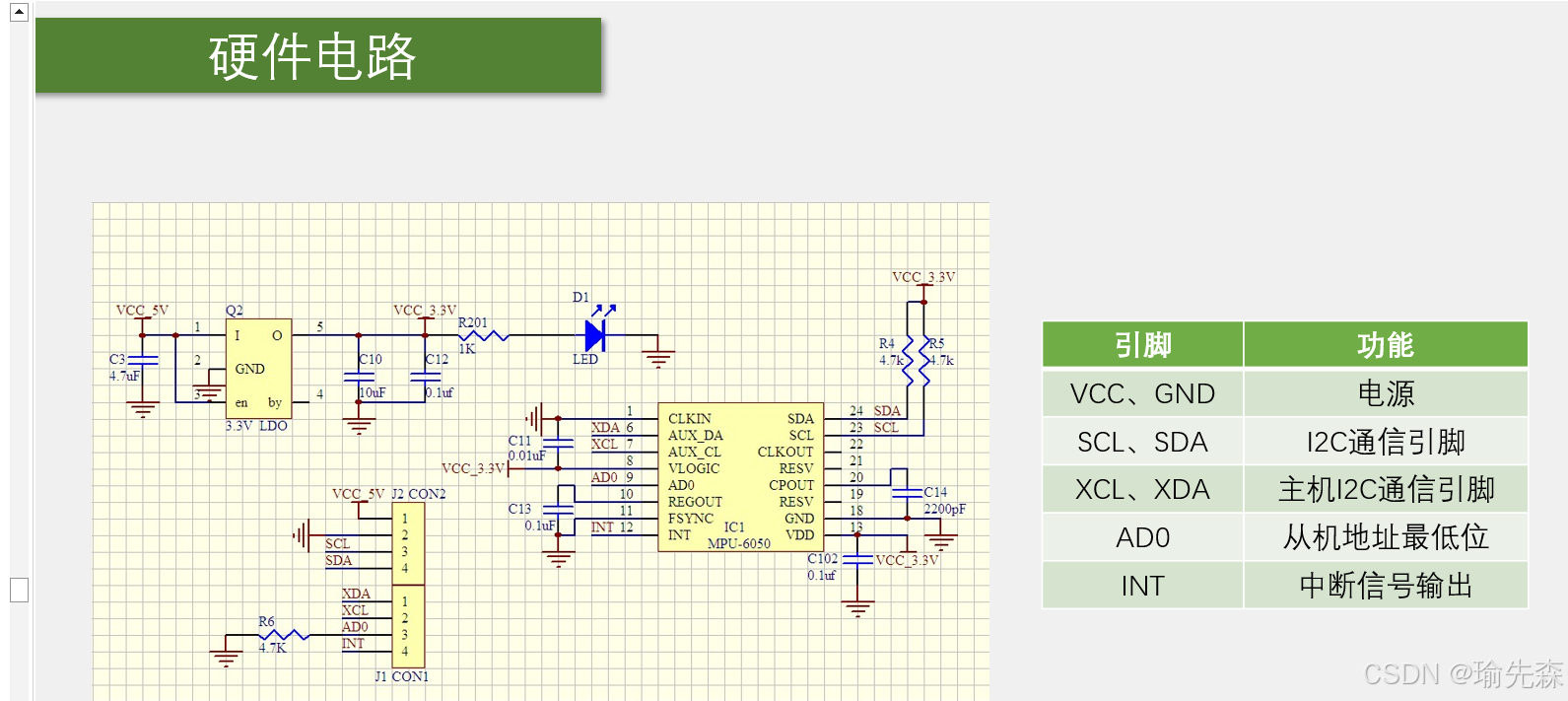
- XCL和XDA用于扩展设备,例如气压计等等
- AD0用于配置从机地址最低位,也就是第8位,默认是0
- 若使用中断,则中断可引起INT电平跳变
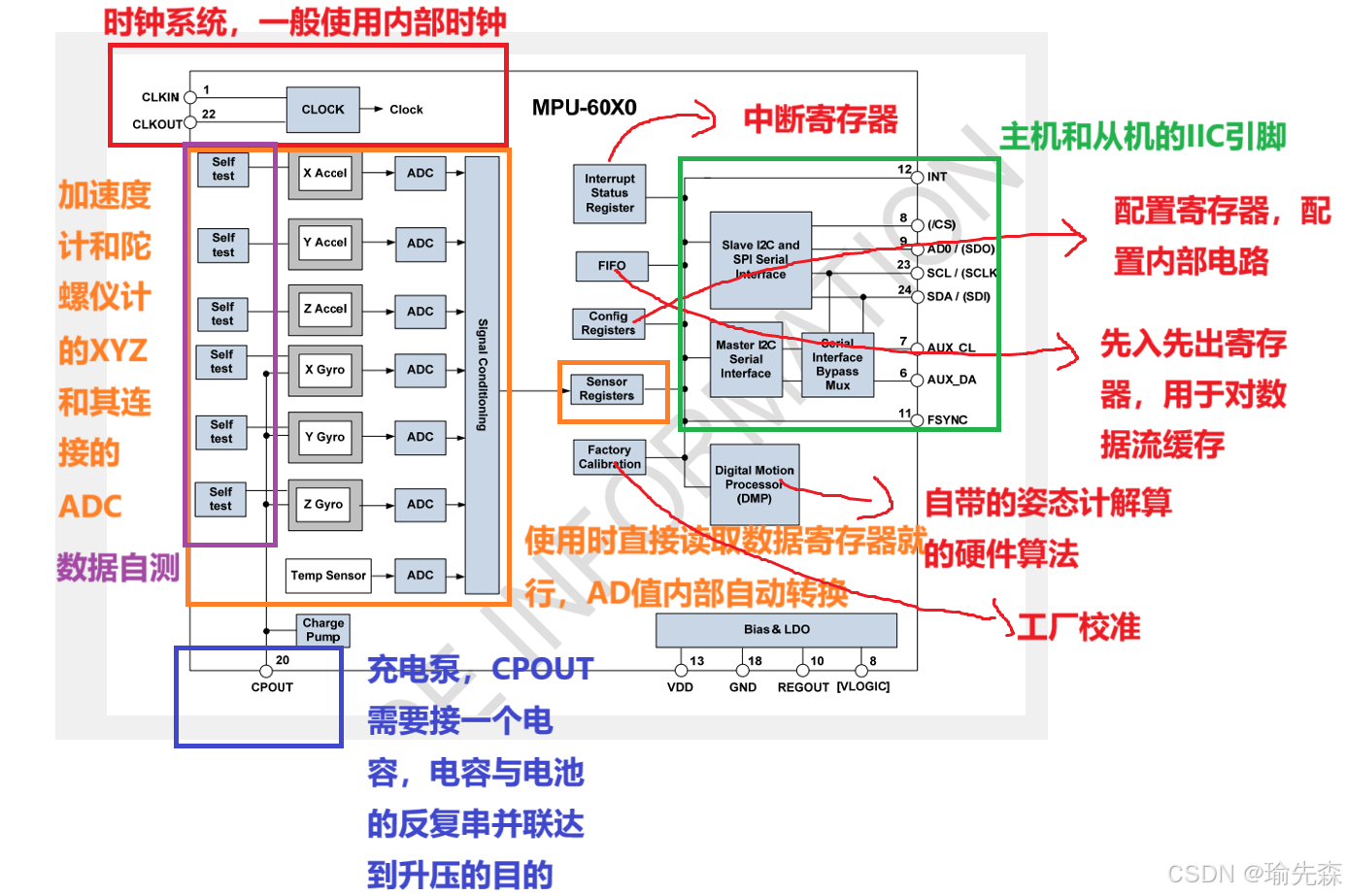
内部框图
IIC通讯外设
IIC外设简介
- 10位地址模式:也就是前五位必须是11110作为10位寻址标志位,然后第一个字节有7个地址位和一位读写位,第二个字节有8个地址位,那么第一个字节的7个地址位中的前五位为标志位,后两位和第二个字节的8位为地址位,总共10位就是1024种情况
- SMBus是系统管理总线,主要用于电源管理系统,了解即可
IIC框图

主要分为SDA和SCL两个部分,SDA主要与DR和数据移位寄存器有关,其过程类似于串口,SCL主要和CCR,CR,SR有关,其余部分了解即可
IIC基本结构(一主多从)
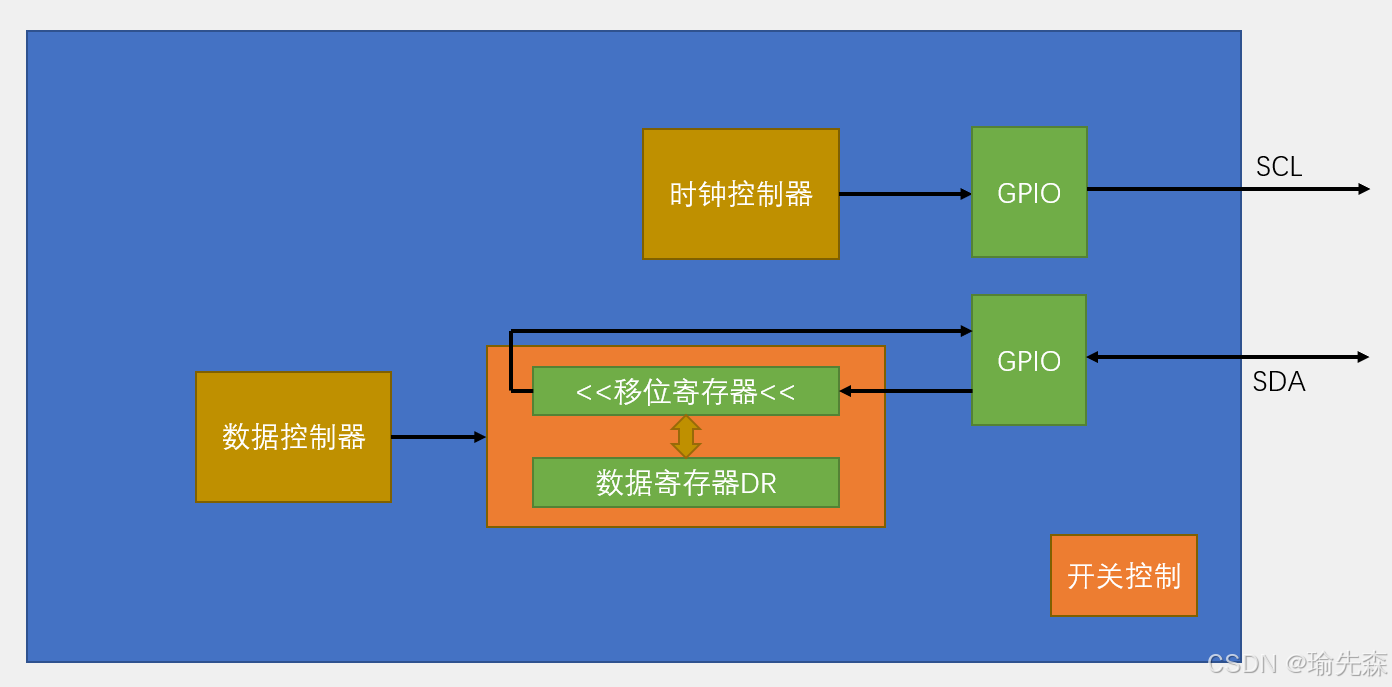
- 由于高位先行,所以移位寄存器是向左移位,主要通讯过程还是看移位寄存器和DR的配合,一个SCL时钟移位一次,移位8次可将一个字节放在SDA线上,大概流程就是,先将数据写入DR,当移位寄存器是空的时候,就转到移位寄存器然后发送
(对应后面时序的数据寄存器空和移位寄存器空) - GPIO口都要配置成复用开漏输出模式,因为使用的是片上外设
时序—主机发送
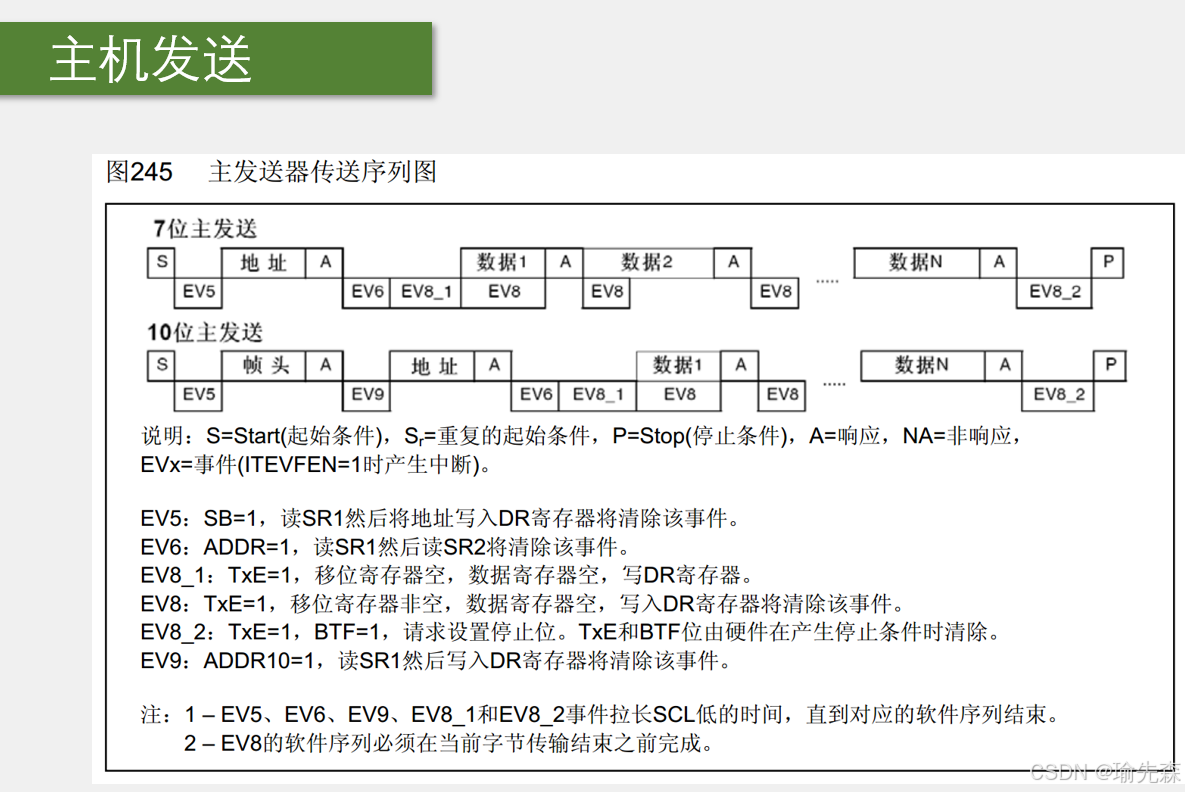
- EVx(Event x)即事件x,使用事件来表示相当于一个大的标志位包含多个小标志位,有专门的函数来读取这个大标志位,也就是配置CR会产生多个不同标志位组合形成了EVx这个大标志位
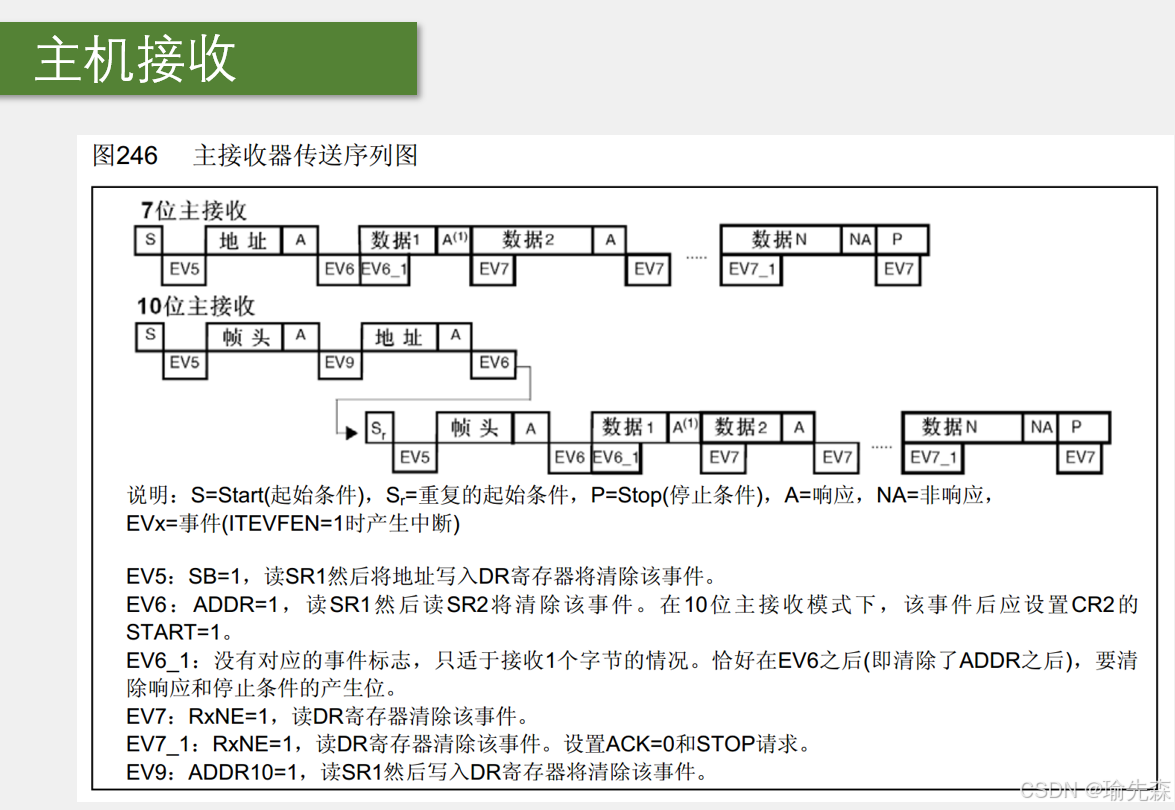
时序—主机接受
软件和硬件的波形对比(上为软件,下为硬件)
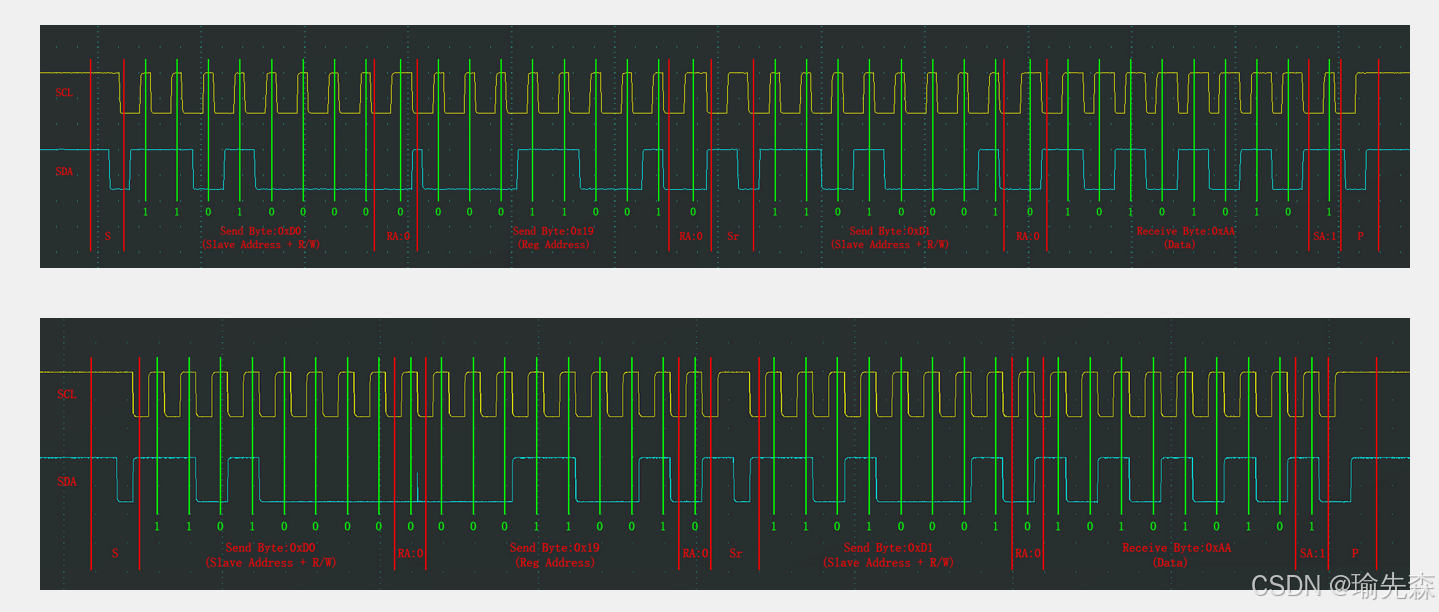
大概的区别:
- 软件波形不规整,SCL高电平占空比不一致,硬件则十分规整
- 软件中SDA在SCL拉低SCL变换数据时存在较大延时,硬件则延时很小,基本上在SCL拉低的瞬间就立马变换SDA
- 图中RA应答结束时,硬件产生了一个小尖峰,而软件则产生一个峰值延迟,这是在RA结束时,从机立马就释放了SDA将SDA操纵权归还主机,让主机准备发送下一个数据0,但是这里软件主机延迟了一会才拉低SDA,将0放在SDA线上,硬件则是主机立马就拉低SDA,所以没有产生那个峰值延迟而是产生一个尖峰
代码部分

软件模拟iic
软件模拟说明白了就是实现代码模拟时序结构,达到发送字节的效果,和以前51里面的写法基本相同
MyI2C.c
#include "stm32f10x.h" // Device header
#include "Delay.h"/*引脚配置层*//*** 函 数:I2C写SCL引脚电平* 参 数:BitValue 协议层传入的当前需要写入SCL的电平,范围0~1* 返 回 值:无* 注意事项:此函数需要用户实现内容,当BitValue为0时,需要置SCL为低电平,当BitValue为1时,需要置SCL为高电平*/
void MyI2C_W_SCL(uint8_t BitValue)
{GPIO_WriteBit(GPIOB, GPIO_Pin_10, (BitAction)BitValue); //根据BitValue,设置SCL引脚的电平Delay_us(10); //延时10us,防止时序频率超过要求
}/*** 函 数:I2C写SDA引脚电平* 参 数:BitValue 协议层传入的当前需要写入SDA的电平,范围0~1* 返 回 值:无* 注意事项:此函数需要用户实现内容,当BitValue为0时,需要置SDA为低电平,当BitValue为1时,需要置SDA为高电平*/
void MyI2C_W_SDA(uint8_t BitValue)
{GPIO_WriteBit(GPIOB, GPIO_Pin_11, (BitAction)BitValue); //根据BitValue,设置SDA引脚的电平,BitValue要实现非0即1的特性Delay_us(10); //延时10us,防止时序频率超过要求
}/*** 函 数:I2C读SDA引脚电平* 参 数:无* 返 回 值:协议层需要得到的当前SDA的电平,范围0~1* 注意事项:此函数需要用户实现内容,当前SDA为低电平时,返回0,当前SDA为高电平时,返回1*/
uint8_t MyI2C_R_SDA(void)
{uint8_t BitValue;BitValue = GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_11); //读取SDA电平Delay_us(10); //延时10us,防止时序频率超过要求return BitValue; //返回SDA电平
}/*** 函 数:I2C初始化* 参 数:无* 返 回 值:无* 注意事项:此函数需要用户实现内容,实现SCL和SDA引脚的初始化*/
void MyI2C_Init(void)
{/*开启时钟*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //开启GPIOB的时钟/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10 | GPIO_Pin_11;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure); //将PB10和PB11引脚初始化为开漏输出/*设置默认电平*/GPIO_SetBits(GPIOB, GPIO_Pin_10 | GPIO_Pin_11); //设置PB10和PB11引脚初始化后默认为高电平(释放总线状态)
}/*协议层*//*** 函 数:I2C起始* 参 数:无* 返 回 值:无*/
void MyI2C_Start(void)
{MyI2C_W_SDA(1); //释放SDA,确保SDA为高电平//其实先释放SCL也可以,但是若SCL还被未释放在高电平时,//此时SDA被释放,根据停止的时序结构就会产生一个停止信号MyI2C_W_SCL(1); //释放SCL,确保SCL为高电平MyI2C_W_SDA(0); //在SCL高电平期间,拉低SDA,产生起始信号MyI2C_W_SCL(0); //起始后把SCL也拉低,即为了占用总线,也为了方便总线时序的拼接
}/*** 函 数:I2C终止* 参 数:无* 返 回 值:无*/
void MyI2C_Stop(void)
{MyI2C_W_SDA(0); //拉低SDA,确保SDA为低电平MyI2C_W_SCL(1); //释放SCL,使SCL呈现高电平MyI2C_W_SDA(1); //在SCL高电平期间,释放SDA,产生终止信号
}/*** 函 数:I2C发送一个字节* 参 数:Byte 要发送的一个字节数据,范围:0x00~0xFF* 返 回 值:无*/
void MyI2C_SendByte(uint8_t Byte)
{uint8_t i;for (i = 0; i < 8; i ++) //循环8次,主机依次发送数据的每一位{/*两个!可以对数据进行两次逻辑取反,作用是把非0值统一转换为1,即:!!(0) = 0,!!(非0) = 1*/MyI2C_W_SDA(!!(Byte & (0x80 >> i)));//使用掩码的方式取出Byte的指定一位数据并写入到SDA线MyI2C_W_SCL(1); //释放SCL,从机在SCL高电平期间读取SDAMyI2C_W_SCL(0); //拉低SCL,主机开始发送下一位数据}
}/*** 函 数:I2C接收一个字节* 参 数:无* 返 回 值:接收到的一个字节数据,范围:0x00~0xFF*/
uint8_t MyI2C_ReceiveByte(void)
{uint8_t i, Byte = 0x00; //定义接收的数据,并赋初值0x00,此处必须赋初值0x00,后面会用到MyI2C_W_SDA(1); //接收前,主机先确保释放SDA,避免干扰从机的数据发送for (i = 0; i < 8; i ++) //循环8次,主机依次接收数据的每一位{MyI2C_W_SCL(1); //释放SCL,主机机在SCL高电平期间读取SDAif (MyI2C_R_SDA()){Byte |= (0x80 >> i);} //读取SDA数据,并存储到Byte变量//当SDA为1时,置变量指定位为1,当SDA为0时,不做处理,指定位为默认的初值0MyI2C_W_SCL(0); //拉低SCL,从机在SCL低电平期间写入SDA}return Byte; //返回接收到的一个字节数据
}/*** 函 数:I2C发送应答位* 参 数:Byte 要发送的应答位,范围:0~1,0表示应答,1表示非应答* 返 回 值:无*/
void MyI2C_SendAck(uint8_t AckBit)
{MyI2C_W_SDA(AckBit); //主机把应答位数据放到SDA线MyI2C_W_SCL(1); //释放SCL,从机在SCL高电平期间,读取应答位MyI2C_W_SCL(0); //拉低SCL,开始下一个时序模块
}/*** 函 数:I2C接收应答位* 参 数:无* 返 回 值:接收到的应答位,范围:0~1,0表示应答,1表示非应答*/
uint8_t MyI2C_ReceiveAck(void)
{uint8_t AckBit; //定义应答位变量MyI2C_W_SDA(1); //接收前,主机先确保释放SDA,避免干扰从机的数据发送MyI2C_W_SCL(1); //释放SCL,主机机在SCL高电平期间读取SDAAckBit = MyI2C_R_SDA(); //将应答位存储到变量里MyI2C_W_SCL(0); //拉低SCL,开始下一个时序模块return AckBit; //返回定义应答位变量
}MyI2C.h
#ifndef __MYI2C_H
#define __MYI2C_Hvoid MyI2C_Init(void);
void MyI2C_Start(void);
void MyI2C_Stop(void);
void MyI2C_SendByte(uint8_t Byte);
uint8_t MyI2C_ReceiveByte(void);
void MyI2C_SendAck(uint8_t AckBit);
uint8_t MyI2C_ReceiveAck(void);#endifMPU6050.c
#include "stm32f10x.h" // Device header
#include "MyI2C.h"
#include "MPU6050_Reg.h"#define MPU6050_ADDRESS 0xD0 //MPU6050的I2C从机地址/*** 函 数:MPU6050写寄存器* 参 数:RegAddress 寄存器地址,范围:参考MPU6050手册的寄存器描述* 参 数:Data 要写入寄存器的数据,范围:0x00~0xFF* 返 回 值:无*/
void MPU6050_WriteReg(uint8_t RegAddress, uint8_t Data)
{MyI2C_Start(); //I2C起始MyI2C_SendByte(MPU6050_ADDRESS); //发送从机地址,读写位为0,表示即将写入MyI2C_ReceiveAck(); //接收应答MyI2C_SendByte(RegAddress); //发送寄存器地址MyI2C_ReceiveAck(); //接收应答MyI2C_SendByte(Data); //发送要写入寄存器的数据MyI2C_ReceiveAck(); //接收应答MyI2C_Stop(); //I2C终止
}/*** 函 数:MPU6050读寄存器* 参 数:RegAddress 寄存器地址,范围:参考MPU6050手册的寄存器描述* 返 回 值:读取寄存器的数据,范围:0x00~0xFF*/
uint8_t MPU6050_ReadReg(uint8_t RegAddress)
{uint8_t Data;MyI2C_Start(); //I2C起始MyI2C_SendByte(MPU6050_ADDRESS); //发送从机地址,读写位为0,表示即将写入MyI2C_ReceiveAck(); //接收应答MyI2C_SendByte(RegAddress); //发送寄存器地址MyI2C_ReceiveAck(); //接收应答MyI2C_Start(); //I2C重复起始MyI2C_SendByte(MPU6050_ADDRESS | 0x01); //发送从机地址,读写位为1,表示即将读取MyI2C_ReceiveAck(); //接收应答Data = MyI2C_ReceiveByte(); //接收指定寄存器的数据MyI2C_SendAck(1); //发送应答,给从机非应答,终止从机的数据输出MyI2C_Stop(); //I2C终止return Data;
}/*** 函 数:MPU6050初始化* 参 数:无* 返 回 值:无*/
void MPU6050_Init(void)
{MyI2C_Init(); //先初始化底层的I2C/*MPU6050寄存器初始化,需要对照MPU6050手册的寄存器描述配置,此处仅配置了部分重要的寄存器*/MPU6050_WriteReg(MPU6050_PWR_MGMT_1, 0x01); //电源管理寄存器1,取消睡眠模式,选择时钟源为X轴陀螺仪MPU6050_WriteReg(MPU6050_PWR_MGMT_2, 0x00); //电源管理寄存器2,保持默认值0,所有轴均不待机MPU6050_WriteReg(MPU6050_SMPLRT_DIV, 0x09); //采样率分频寄存器,配置采样率MPU6050_WriteReg(MPU6050_CONFIG, 0x06); //配置寄存器,配置DLPFMPU6050_WriteReg(MPU6050_GYRO_CONFIG, 0x18); //陀螺仪配置寄存器,选择满量程为±2000°/sMPU6050_WriteReg(MPU6050_ACCEL_CONFIG, 0x18); //加速度计配置寄存器,选择满量程为±16g
}/*** 函 数:MPU6050获取ID号* 参 数:无* 返 回 值:MPU6050的ID号*/
uint8_t MPU6050_GetID(void)
{return MPU6050_ReadReg(MPU6050_WHO_AM_I); //返回WHO_AM_I寄存器的值
}/*** 函 数:MPU6050获取数据* 参 数:AccX AccY AccZ 加速度计X、Y、Z轴的数据,使用输出参数的形式返回,范围:-32768~32767* 参 数:GyroX GyroY GyroZ 陀螺仪X、Y、Z轴的数据,使用输出参数的形式返回,范围:-32768~32767* 返 回 值:无*/
void MPU6050_GetData(int16_t *AccX, int16_t *AccY, int16_t *AccZ, int16_t *GyroX, int16_t *GyroY, int16_t *GyroZ)
{uint8_t DataH, DataL; //定义数据高8位和低8位的变量DataH = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_H); //读取加速度计X轴的高8位数据DataL = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_L); //读取加速度计X轴的低8位数据*AccX = (DataH << 8) | DataL; //数据拼接,通过输出参数返回DataH = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_H); //读取加速度计Y轴的高8位数据DataL = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_L); //读取加速度计Y轴的低8位数据*AccY = (DataH << 8) | DataL; //数据拼接,通过输出参数返回DataH = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_H); //读取加速度计Z轴的高8位数据DataL = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_L); //读取加速度计Z轴的低8位数据*AccZ = (DataH << 8) | DataL; //数据拼接,通过输出参数返回DataH = MPU6050_ReadReg(MPU6050_GYRO_XOUT_H); //读取陀螺仪X轴的高8位数据DataL = MPU6050_ReadReg(MPU6050_GYRO_XOUT_L); //读取陀螺仪X轴的低8位数据*GyroX = (DataH << 8) | DataL; //数据拼接,通过输出参数返回DataH = MPU6050_ReadReg(MPU6050_GYRO_YOUT_H); //读取陀螺仪Y轴的高8位数据DataL = MPU6050_ReadReg(MPU6050_GYRO_YOUT_L); //读取陀螺仪Y轴的低8位数据*GyroY = (DataH << 8) | DataL; //数据拼接,通过输出参数返回DataH = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_H); //读取陀螺仪Z轴的高8位数据DataL = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_L); //读取陀螺仪Z轴的低8位数据*GyroZ = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
}MPU6050.h
#ifndef __MPU6050_H
#define __MPU6050_Hvoid MPU6050_WriteReg(uint8_t RegAddress, uint8_t Data);
uint8_t MPU6050_ReadReg(uint8_t RegAddress);void MPU6050_Init(void);
uint8_t MPU6050_GetID(void);
void MPU6050_GetData(int16_t *AccX, int16_t *AccY, int16_t *AccZ, int16_t *GyroX, int16_t *GyroY, int16_t *GyroZ);#endifMPU6050_Reg
#ifndef __MPU6050_REG_H
#define __MPU6050_REG_H#define MPU6050_SMPLRT_DIV 0x19
#define MPU6050_CONFIG 0x1A
#define MPU6050_GYRO_CONFIG 0x1B
#define MPU6050_ACCEL_CONFIG 0x1C#define MPU6050_ACCEL_XOUT_H 0x3B
#define MPU6050_ACCEL_XOUT_L 0x3C
#define MPU6050_ACCEL_YOUT_H 0x3D
#define MPU6050_ACCEL_YOUT_L 0x3E
#define MPU6050_ACCEL_ZOUT_H 0x3F
#define MPU6050_ACCEL_ZOUT_L 0x40
#define MPU6050_TEMP_OUT_H 0x41
#define MPU6050_TEMP_OUT_L 0x42
#define MPU6050_GYRO_XOUT_H 0x43
#define MPU6050_GYRO_XOUT_L 0x44
#define MPU6050_GYRO_YOUT_H 0x45
#define MPU6050_GYRO_YOUT_L 0x46
#define MPU6050_GYRO_ZOUT_H 0x47
#define MPU6050_GYRO_ZOUT_L 0x48#define MPU6050_PWR_MGMT_1 0x6B
#define MPU6050_PWR_MGMT_2 0x6C
#define MPU6050_WHO_AM_I 0x75#endifmain.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "MPU6050.h"uint8_t ID; //定义用于存放ID号的变量
int16_t AX, AY, AZ, GX, GY, GZ; //定义用于存放各个数据的变量int main(void)
{/*模块初始化*/OLED_Init(); //OLED初始化MPU6050_Init(); //MPU6050初始化/*显示ID号*/OLED_ShowString(1, 1, "ID:"); //显示静态字符串ID = MPU6050_GetID(); //获取MPU6050的ID号OLED_ShowHexNum(1, 4, ID, 2); //OLED显示ID号while (1){MPU6050_GetData(&AX, &AY, &AZ, &GX, &GY, &GZ); //获取MPU6050的数据OLED_ShowSignedNum(2, 1, AX, 5); //OLED显示数据OLED_ShowSignedNum(3, 1, AY, 5);OLED_ShowSignedNum(4, 1, AZ, 5);OLED_ShowSignedNum(2, 8, GX, 5);OLED_ShowSignedNum(3, 8, GY, 5);OLED_ShowSignedNum(4, 8, GZ, 5);}
}硬件模拟iic
硬件模拟也就是使用写好的库函数控制DR,SR,CR各个寄存器,而电平的翻转由硬件控制,写入CR或者DR就可以控制时序单元的发生,时序单元发生后就可以检查对应的EVx,也就是检查SR,然后等待时序单元的发送完成,然后依次操作寄存器,等待时序单元发送,如此循环,这是发送部分;接受部分就是写入CR读取DR,产生时序单元,等待事件和时序单元的完成,如此循环
MPU6050.c
#include "stm32f10x.h" // Device header
#include "MPU6050_Reg.h"#define MPU6050_ADDRESS 0xD0 //MPU6050的I2C从机地址/*** 函 数:MPU6050等待事件* 参 数:同I2C_CheckEvent* 返 回 值:无*/
void MPU6050_WaitEvent(I2C_TypeDef* I2Cx, uint32_t I2C_EVENT)
{uint32_t Timeout;Timeout = 10000; //给定超时计数时间while (I2C_CheckEvent(I2Cx, I2C_EVENT) != SUCCESS) //循环等待指定事件{Timeout --; //等待时,计数值自减if (Timeout == 0) //自减到0后,等待超时{/*超时的错误处理代码,可以添加到此处*/break; //跳出等待,不等了}}
}/*** 函 数:MPU6050写寄存器* 参 数:RegAddress 寄存器地址,范围:参考MPU6050手册的寄存器描述* 参 数:Data 要写入寄存器的数据,范围:0x00~0xFF* 返 回 值:无*/
void MPU6050_WriteReg(uint8_t RegAddress, uint8_t Data)
{I2C_GenerateSTART(I2C2, ENABLE); //硬件I2C生成起始条件MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT); //等待EV5I2C_Send7bitAddress(I2C2, MPU6050_ADDRESS, I2C_Direction_Transmitter); //硬件I2C发送从机地址,方向为发送MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED); //等待EV6I2C_SendData(I2C2, RegAddress); //硬件I2C发送寄存器地址MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTING); //等待EV8I2C_SendData(I2C2, Data); //硬件I2C发送数据MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTED); //等待EV8_2I2C_GenerateSTOP(I2C2, ENABLE); //硬件I2C生成终止条件
}/*** 函 数:MPU6050读寄存器* 参 数:RegAddress 寄存器地址,范围:参考MPU6050手册的寄存器描述* 返 回 值:读取寄存器的数据,范围:0x00~0xFF*/
uint8_t MPU6050_ReadReg(uint8_t RegAddress)
{uint8_t Data;I2C_GenerateSTART(I2C2, ENABLE); //硬件I2C生成起始条件MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT); //等待EV5I2C_Send7bitAddress(I2C2, MPU6050_ADDRESS, I2C_Direction_Transmitter); //硬件I2C发送从机地址,方向为发送MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED); //等待EV6I2C_SendData(I2C2, RegAddress); //硬件I2C发送寄存器地址MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTED); //等待EV8_2I2C_GenerateSTART(I2C2, ENABLE); //硬件I2C生成重复起始条件MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT); //等待EV5I2C_Send7bitAddress(I2C2, MPU6050_ADDRESS, I2C_Direction_Receiver); //硬件I2C发送从机地址,方向为接收MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED); //等待EV6I2C_AcknowledgeConfig(I2C2, DISABLE); //在接收最后一个字节之前提前将应答失能I2C_GenerateSTOP(I2C2, ENABLE); //在接收最后一个字节之前提前申请停止条件MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_RECEIVED); //等待EV7Data = I2C_ReceiveData(I2C2); //接收数据寄存器I2C_AcknowledgeConfig(I2C2, ENABLE); //将应答恢复为使能,为了不影响后续可能产生的读取多字节操作return Data;
}/*** 函 数:MPU6050初始化* 参 数:无* 返 回 值:无*/
void MPU6050_Init(void)
{/*开启时钟*/RCC_APB1PeriphClockCmd(RCC_APB1Periph_I2C2, ENABLE); //开启I2C2的时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //开启GPIOB的时钟/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10 | GPIO_Pin_11;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure); //将PB10和PB11引脚初始化为复用开漏输出/*I2C初始化*/I2C_InitTypeDef I2C_InitStructure; //定义结构体变量I2C_InitStructure.I2C_Mode = I2C_Mode_I2C; //模式,选择为I2C模式I2C_InitStructure.I2C_ClockSpeed = 50000; //时钟速度,选择为50KHzI2C_InitStructure.I2C_DutyCycle = I2C_DutyCycle_2; //时钟占空比,选择Tlow/Thigh = 2I2C_InitStructure.I2C_Ack = I2C_Ack_Enable; //应答,选择使能I2C_InitStructure.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit; //应答地址,选择7位,从机模式下才有效I2C_InitStructure.I2C_OwnAddress1 = 0x00; //自身地址,从机模式下才有效I2C_Init(I2C2, &I2C_InitStructure); //将结构体变量交给I2C_Init,配置I2C2/*I2C使能*/I2C_Cmd(I2C2, ENABLE); //使能I2C2,开始运行/*MPU6050寄存器初始化,需要对照MPU6050手册的寄存器描述配置,此处仅配置了部分重要的寄存器*/MPU6050_WriteReg(MPU6050_PWR_MGMT_1, 0x01); //电源管理寄存器1,取消睡眠模式,选择时钟源为X轴陀螺仪MPU6050_WriteReg(MPU6050_PWR_MGMT_2, 0x00); //电源管理寄存器2,保持默认值0,所有轴均不待机MPU6050_WriteReg(MPU6050_SMPLRT_DIV, 0x09); //采样率分频寄存器,配置采样率MPU6050_WriteReg(MPU6050_CONFIG, 0x06); //配置寄存器,配置DLPFMPU6050_WriteReg(MPU6050_GYRO_CONFIG, 0x18); //陀螺仪配置寄存器,选择满量程为±2000°/sMPU6050_WriteReg(MPU6050_ACCEL_CONFIG, 0x18); //加速度计配置寄存器,选择满量程为±16g
}/*** 函 数:MPU6050获取ID号* 参 数:无* 返 回 值:MPU6050的ID号*/
uint8_t MPU6050_GetID(void)
{return MPU6050_ReadReg(MPU6050_WHO_AM_I); //返回WHO_AM_I寄存器的值
}/*** 函 数:MPU6050获取数据* 参 数:AccX AccY AccZ 加速度计X、Y、Z轴的数据,使用输出参数的形式返回,范围:-32768~32767* 参 数:GyroX GyroY GyroZ 陀螺仪X、Y、Z轴的数据,使用输出参数的形式返回,范围:-32768~32767* 返 回 值:无*/
void MPU6050_GetData(int16_t *AccX, int16_t *AccY, int16_t *AccZ, int16_t *GyroX, int16_t *GyroY, int16_t *GyroZ)
{uint8_t DataH, DataL; //定义数据高8位和低8位的变量DataH = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_H); //读取加速度计X轴的高8位数据DataL = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_L); //读取加速度计X轴的低8位数据*AccX = (DataH << 8) | DataL; //数据拼接,通过输出参数返回DataH = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_H); //读取加速度计Y轴的高8位数据DataL = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_L); //读取加速度计Y轴的低8位数据*AccY = (DataH << 8) | DataL; //数据拼接,通过输出参数返回DataH = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_H); //读取加速度计Z轴的高8位数据DataL = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_L); //读取加速度计Z轴的低8位数据*AccZ = (DataH << 8) | DataL; //数据拼接,通过输出参数返回DataH = MPU6050_ReadReg(MPU6050_GYRO_XOUT_H); //读取陀螺仪X轴的高8位数据DataL = MPU6050_ReadReg(MPU6050_GYRO_XOUT_L); //读取陀螺仪X轴的低8位数据*GyroX = (DataH << 8) | DataL; //数据拼接,通过输出参数返回DataH = MPU6050_ReadReg(MPU6050_GYRO_YOUT_H); //读取陀螺仪Y轴的高8位数据DataL = MPU6050_ReadReg(MPU6050_GYRO_YOUT_L); //读取陀螺仪Y轴的低8位数据*GyroY = (DataH << 8) | DataL; //数据拼接,通过输出参数返回DataH = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_H); //读取陀螺仪Z轴的高8位数据DataL = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_L); //读取陀螺仪Z轴的低8位数据*GyroZ = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
}MPU6050.h
#ifndef __MPU6050_H
#define __MPU6050_Hvoid MPU6050_WriteReg(uint8_t RegAddress, uint8_t Data);
uint8_t MPU6050_ReadReg(uint8_t RegAddress);void MPU6050_Init(void);
uint8_t MPU6050_GetID(void);
void MPU6050_GetData(int16_t *AccX, int16_t *AccY, int16_t *AccZ, int16_t *GyroX, int16_t *GyroY, int16_t *GyroZ);#endifMPU6050_reg.h
#ifndef __MPU6050_REG_H
#define __MPU6050_REG_H#define MPU6050_SMPLRT_DIV 0x19
#define MPU6050_CONFIG 0x1A
#define MPU6050_GYRO_CONFIG 0x1B
#define MPU6050_ACCEL_CONFIG 0x1C#define MPU6050_ACCEL_XOUT_H 0x3B
#define MPU6050_ACCEL_XOUT_L 0x3C
#define MPU6050_ACCEL_YOUT_H 0x3D
#define MPU6050_ACCEL_YOUT_L 0x3E
#define MPU6050_ACCEL_ZOUT_H 0x3F
#define MPU6050_ACCEL_ZOUT_L 0x40
#define MPU6050_TEMP_OUT_H 0x41
#define MPU6050_TEMP_OUT_L 0x42
#define MPU6050_GYRO_XOUT_H 0x43
#define MPU6050_GYRO_XOUT_L 0x44
#define MPU6050_GYRO_YOUT_H 0x45
#define MPU6050_GYRO_YOUT_L 0x46
#define MPU6050_GYRO_ZOUT_H 0x47
#define MPU6050_GYRO_ZOUT_L 0x48#define MPU6050_PWR_MGMT_1 0x6B
#define MPU6050_PWR_MGMT_2 0x6C
#define MPU6050_WHO_AM_I 0x75#endifmain.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "MPU6050.h"uint8_t ID; //定义用于存放ID号的变量
int16_t AX, AY, AZ, GX, GY, GZ; //定义用于存放各个数据的变量int main(void)
{/*模块初始化*/OLED_Init(); //OLED初始化MPU6050_Init(); //MPU6050初始化/*显示ID号*/OLED_ShowString(1, 1, "ID:"); //显示静态字符串ID = MPU6050_GetID(); //获取MPU6050的ID号OLED_ShowHexNum(1, 4, ID, 2); //OLED显示ID号while (1){MPU6050_GetData(&AX, &AY, &AZ, &GX, &GY, &GZ); //获取MPU6050的数据OLED_ShowSignedNum(2, 1, AX, 5); //OLED显示数据OLED_ShowSignedNum(3, 1, AY, 5);OLED_ShowSignedNum(4, 1, AZ, 5);OLED_ShowSignedNum(2, 8, GX, 5);OLED_ShowSignedNum(3, 8, GY, 5);OLED_ShowSignedNum(4, 8, GZ, 5);}
}相关文章:

STM32江科大----IIC
声明:本人跟随b站江科大学习,本文章是观看完视频后的一些个人总结和经验分享,也同时为了方便日后的复习,如果有错误请各位大佬指出,如果对你有帮助可以点个赞小小鼓励一下,本文章建议配合原视频使用❤️ 如…...
系统,提示词(Prompt)表现测试(数据说话))
RAG(检索增强生成)系统,提示词(Prompt)表现测试(数据说话)
在RAG(检索增强生成)系统中,评价提示词(Prompt)设计是否优秀,必须通过量化测试数据来验证,而非主观判断。以下是系统化的评估方法、测试指标和具体实现方案: 一、提示词优秀的核心标准 优秀的提示词应显著提升以下指标: 维度量化指标测试方法事实一致性Faithfulness …...

【leetcode hot 100 763】划分字母区间
解法一:用map记录<字母,字母出现的次数>,循环取出value-1,每次判断已经取出的字母(Set记录)是否还在后面存在(value>1),若存在继续循环,若不存在开启…...

PCB工艺:现代电子产品的核心制造技术
引言 PCB(Printed Circuit Board,印刷电路板)是电子设备的核心组成部分,几乎所有现代电子产品,从智能手机到航天设备,都依赖于PCB实现电路连接。PCB制造工艺的进步直接影响电子产品的性能、可靠性和成本。…...

【UE5 C++课程系列笔记】34——结构体与Json的相互转化
目录 准备工作 一、结构体转Json 二、Json转结构体 三、复杂结构体与Json的转换 主要通过借助FJsonObjectConverter类实现结构体和 JSON 之间的相互转换。 准备工作 首先新建一个结构体如下 添加两个方法分别用于将Struct转为Json、Json转为Struct 一、结构体转Json FStri…...
)
2025最新系统 Git 教程(二)
第2章 Git基础 2.1 Git 基础 - 获取 Git 仓库 如果你只想通过阅读一章来学习 Git,那么本章将是你的不二选择。 本章涵盖了你在使用 Git 完成各种工作时将会用到的各种基本命令。 在学习完本章之后,你应该能够配置并初始化一个仓库(reposito…...

力扣hot100_动态规划
动态规划 hot100_198. 打家劫舍 你是一个专业的小偷,计划偷窃沿街的房屋。每间房内都藏有一定的现金,影响你偷窃的唯一制约因素就是相邻的房屋装有相互连通的防盗系统,如果两间相邻的房屋在同一晚上被小偷闯入,系统会自动报警。…...

玄机-第六章-哥斯拉4.0流量分析的测试报告
目录 一、测试环境 二、测试目的 三、操作过程 Flag1 Flag2 Flag3 Flag4 Flag5 Flag6 Flag7 Flag8 Flag9 Flag10 Flag11 Flag12 Flag13 pam_unix.so关键代码 四、结论 一、测试环境 靶场介绍:国内厂商设置的玄机靶场,以应急响应题目著…...

【Hadoop入门】Hadoop生态圈概述:核心组件与应用场景概述
1 Hadoop生态圈概述 Hadoop生态圈是以 HDFS(分布式存储) 和 YARN(资源调度) 为核心,围绕大数据存储、计算、管理、分析等需求发展出的一系列开源工具集合。 核心特点: 模块化:各组件专注解决特定…...

深度学习实战电力设备缺陷检测
本文采用YOLOv11作为核心算法框架,结合PyQt5构建用户界面,使用Python3进行开发。YOLOv11以其高效的实时检测能力,在多个目标检测任务中展现出卓越性能。本研究针对电力设备缺陷数据集进行训练和优化,该数据集包含丰富的电力设备缺…...
)
随机产生4位随机码(java)
Random类: 用于生成随机数 import java.util.Random; 导入必要的类 generateVerificationCode()方法: 这是一个静态方法,可以直接通过类名调用 返回一个6位数字的字符串,首位不为0 生成首位数字: random.nextInt…...
——RTCP协议简介(下))
音视频入门基础:RTCP专题(4)——RTCP协议简介(下)
本文接着《音视频入门基础:RTCP专题(3)——RTCP协议简介(中)》,继续对RTCP协议进行简介。本文的一级标题从“十四”开始。 十四、SDES: Source Description RTCP Packet 本段内容对应《RFC 3550》的第6.5节…...

PyCharm2024.3.5专业版解决Conda executable is not found问题
项目场景: pycharm使用anaconda 内的虚拟环境 pycharm 2024.3.5 专业版 C:\Users\Administrator>conda infoactive environment : transmute_recipe_generatoractive env location : D:\anaconda3\envs\transmute_recipe_generatorshell level : 1user config…...

滑动窗口思想 面试算法高频题
基本思想 滑动窗口思想其实就是快慢型的特例 计算机网络中滑动窗口协议(Sliding Window Protocol),该协议是TCP实现流量控制等的核心策略之一。事实上在与流量控制、熔断、限流、超时等场景下都会首先从滑动窗口的角度来思考问题࿰…...

Linux中特殊的变量
1.$# 含义:表示传入脚本或函数的参数数量。 用法:用于检查用户是否提供了足够的参数。 示例: #!/bin/bash echo "参数数量: $#"2.$? 含义:表示上一条命令的退出状态。如果命令成功执行,值为 0;…...

Linux文件系统与日志分析
目录 一.日志 1.1日志的定义 1.2日志的功能 1.3日志的分类 1.4日志的文件格式 1.5用户日志 1.6一些常见的日志 1.7日志消息的级别 二.系统日志管理 rsyslog 2.1rsyslog的定义 2.2rsyslog 配置文件 2.3rsyslog的实际应用----单独显示某一服务的日志 1.编辑rsyslog配…...

从传统物流到智能调度的全链路升级
一、TMS系统升级的核心目标与整体框架 (一)为什么要升级?传统物流管理的三大痛点 调度效率低下:过去依赖人工分单、手动匹配承运商,订单量大时容易出错,比如不同区域的订单混排导致运输路线绕路ÿ…...
问题)
UE5中如何修复后处理动画蓝图带来的自然状态下的metablriger身体绑定形变(如耸肩)问题
【[metablriger] UE5中如何修复后处理动画蓝图带来的自然状态下的metablriger身体绑定形变(如耸肩)问题】 UE5中如何修复后处理动画蓝图带来的自然状态下的metablriger身体绑定形变(如耸肩)问题...

STL_vector_01_基本用法
👋 Hi, I’m liubo👀 I’m interested in harmony🌱 I’m currently learning harmony💞️ I’m looking to collaborate on …📫 How to reach me …📇 sssssdsdsdsdsdsdasd🎃 dsdsdsdsdsddfsg…...

css2学习总结之尚品汇静态页面
css2总结之尚品汇 一、布局 在 PC 端网页中,一般都会有一个固定宽度且水平居中的盒子,来显示网页的主要内容,这是网页 的版心。 版心的宽度一般是 960 ~ 1200 像素之间。 版心可以是一个,也可以是多个。 二、布局相关名词 我…...

Lua 第5部分 表
表( Table )是 Lua 语言中最主要(事实上也是唯一的)和强大的数据结构。 使用表,Lua语言可以以一种简单、统一且高效的方式表示数组、集合、记录和其他很多数据结构。 Lua语言也使用表来表示包( package &am…...

01分数规划
https://ac.nowcoder.com/acm/contest/22353/1011 并不需要高级数据结构,对答案二分即可。 假定当前二分的答案为 x x x,则 ∑ v i ∑ w i ≥ x \frac{ \sum_{v_i} }{\sum_{w_i}} ≥ x ∑wi∑vi≥x 成立时 x x x 才可能是最后的答案。 化简式…...

无人机动力系统全维度解析:技术演进、选型策略与未来趋势
一、动力系统技术理念与设计逻辑 (一)核心技术指标 能量密度:决定续航能力的关键参数,单位为 Wh/kg。当前主流锂聚合物电池能量密度约 250-300Wh/kg,氢燃料电池可达 500-800Wh/kg,航空燃油则高达 12,000W…...
)
重新审视中国的GB标准(44495 – 44497)
此前,我们深入探讨了中国新推出的智能互联汽车(ICV)网络安全标准GB Standard 44495-2024。我们探讨了该标准对汽车制造商的影响、与UNECE R155和ISO/SAE 21434等全球标准的一致性,以及该标准对未来汽车网络安全的意义。 然而,GB 44495-2024并…...
之做一个简易的shell)
Linux进程控制(五)之做一个简易的shell
文章目录 做一个简易的shell预备知识代码实现运行结果 做一个简易的shell 重谈Shell shell是操作系统的一层外壳程序,帮我们用户执行指令, 获取到指令后,交给操作系统,操作系统执行完后,把执行结果通过shell交给用户…...

Apache Kafka全栈技术解析
目录 第一章 Kafka概述与核心价值 1.1 消息队列的演进与Kafka的诞生 1.2 Kafka的核心应用场景 1.3 Kafka生态全景图 第二章 Kafka核心概念与架构解析 2.1 核心概念深度剖析 2.2 Kafka架构设计精要 第三章 Kafka环境搭建与配置 3.1 单机部署实战 3.2 集群部署最佳实践 …...
)
结合 Flink/Spark 进行 AI 大数据处理(实时数据 + AI 推理的应用场景)
随着企业对实时智能决策的需求日益增强,将 Flink / Spark 等流批计算框架 与 大模型推理能力相结合,正在成为 AI 工业化落地的重要实践路径。本篇文章将深入介绍如何将 AI 模型集成到大数据流处理系统中,实现实时感知、智能判断与自动反馈。 1. 为什么需要“实时数据 + AI 推…...

开发PDF时,如何比较 PDF 文件
在 PDF 论坛上,“如何比较 PDF 文件”是一个经常被提到的问题。在开始之前,重要的是要明确你想要比较的内容是什么。 不同的 PDF 文件可能看起来一样吗? 是的,可能。不同的 PDF 创建工具可能会生成在视觉上完全相同的页面&#x…...

自动提取pdf公式 ➕ 输出 LaTeX
# 创建打包脚本的主内容 script_content """ from doc2x.extract_formula import extract_formula_imgs from pix2text import Pix2Text from PIL import Image import osdef main():pdf_path "your_file.pdf" # 将你的PDF命名为 your_file.pdf 并…...

abaqus二次开发python程序集
abaqus二次开发python程序集 1、设置字体背景色等2、读取模态频率并写入 csv 文件3、在两个窗口快速对比各价模态 1、设置字体背景色等 # _*_ coding:UTF-8 _*_from abaqusConstants import* def fontsize(sessionNone):#设置字体session.viewports[Viewport: 1].viewportAnno…...

高级java每日一道面试题-2025年3月23日-微服务篇[Nacos篇]-如何使用Nacos进行服务发现?
如果有遗漏,评论区告诉我进行补充 面试官: 如何使用Nacos进行服务发现? 我回答: 在Java高级面试中讨论如何使用Nacos进行服务发现时,可以从多个角度深入探讨,包括基本概念、配置步骤、代码示例以及高级特性。以下是综合了多种信息的详细回…...
)
k8s核心资源对象一(入门到精通)
本文将深入探讨Kubernetes中的核心资源对象,包括Pod、Deployment、Service、Ingress、ConfigMap和Secret,详细解析其概念、功能以及实际应用场景,帮助读者全面掌握这些关键组件的使用方法。 一、pod 1 pod概念 k8s最小调度单元,…...

了解 DeepSeek R1
了解DeepSeek R1 R1探索纯强化学习是否可以在没有监督微调的情况下学会推理的能力。 ‘Aha’ Moment 这种现象有点类似于人类在解决问题时突然意识到的方式,以下是它的工作原理: 初始尝试:模型对解决问题进行初始尝试识别:识别…...

【C语言】大小端字节序和字节序判断
前言: 在上章介绍了整形在内存的储存,了解了原码,反码,补码,知道了整数在内存的储存一般是补码,解决了负数相加的问题。 那么在本章为大家讲解一下大小端字节序。 一那字节序是什么呢? 字节…...

DrissionPage移动端自动化:从H5到原生App的跨界测试
一、移动端自动化测试的挑战与机遇 移动端测试面临多维度挑战: 设备碎片化:Android/iOS版本、屏幕分辨率差异 混合应用架构:H5页面与原生组件的深度耦合 交互复杂性:多点触控、手势操作、传感器模拟 性能监控:内存…...

ARM 汇编启动代码详解:从中断向量表到中断处理
ARM 汇编启动代码详解:从中断向量表到中断处理 引言 在嵌入式系统开发中,ARM 处理器(如 Cortex-A 系列)的启动代码是系统初始化和运行的基础。启动代码通常包括中断向量表的创建、初始化硬件状态(如关闭缓存和 MMU&a…...
)
笔试专题(七)
文章目录 乒乓球筐(哈希)题解代码 组队竞赛题解代码 删除相邻数字的最大分数(线性dp)题解代码 乒乓球筐(哈希) 题目链接 题解 1. 两个哈希表 先统计第一个字符串中的字符个数,再统计第二个字…...
)
React基础知识(一)
文章目录 概念特点React基本使用hello_react案例虚拟DOM的两种创建方式使用jsx创建使用js创建 虚拟DOM和真实DOM React jsxXMLjsx语法规则作用基本语法规则js语句和js代码babel.js作用 模块与组件模块组件 React面向组件编程函数式组件类组件 概念 react是一个将数据渲染为Htm…...
核心知识点与面试高频问题)
红黑树(Red-Black Tree)核心知识点与面试高频问题
红黑树(Red-Black Tree)核心知识点与面试高频问题 一、红黑树的核心性质 红黑树是一种自平衡的二叉搜索树,通过以下规则确保平衡性: 节点颜色:每个节点是红色或黑色。 根节点:根必须是黑色。 叶子节点&a…...

SpringBoot整合SSM
一、SpringBoot整合SSM SpringBoot整合SpringSpringBoot整合SpringMVCSpringBoot整合MyBatis(主要) 步骤一:创建SpringBoot工程,添加druid依赖 <!-- todo 1 添加druid连接池依赖--> <dependency><groupId>co…...

set/multiset容器
1.概念 所有元素会在插入时自动排序 set/multiset属于关联式容器,底层结构是用二叉树实现。 set不允许重复元素,multiset允许重复元素。 2. set构造和赋值 set<T> st; set(const set &st);// 拷贝构造函数 set& operator(const set &a…...

vim 编辑器 使用教程
Vim是一款强大的文本(代码)编辑器,它是由Bram Moolenaar于1991年开发完成。它的前身是Bill Joy开发的vi。名字的意义是Vi IMproved。 打开vim,直接在命令行输入vim即可,或者vim <filename>. Vim分为四种模式&a…...

去中心化固定利率协议
核心机制与分类 协议类型: 借贷协议(如Yield、Notional):通过零息债券模型(如fyDai、fCash)锁定固定利率。 收益聚合器(如Saffron、BarnBridge):通过风险分级或博弈论…...

Python高阶函数-filter
1. 基本概念 filter() 是Python内置的高阶函数,用于过滤序列中的元素。它接收一个函数和一个可迭代对象作为参数,返回一个迭代器,包含使函数返回True的所有元素。 filter(function, iterable)2. 工作原理 惰性计算:filter对象是…...

hive/doris查询表的创建和更新时间
hive查询表的创建和更新时间: SELECT d.NAME AS database_name, t.TBL_NAME AS table_name, FROM_UNIXTIME(t.CREATE_TIME) AS create_time, FROM_UNIXTIME(tp.PARAM_VALUE) AS last_ddl_time FROM metastore.TBLS t JOIN metastore.DBS d ON t.DB_ID d.DB_ID JOIN…...

40常用控件_WindowFrame的影响
window frame 的影响 如果 widget 作为一个窗口(带有标题栏,最小化,最大化,关闭按钮),那么在计算尺寸和坐标的 时候就有两种算法.包含 window frame 和 不包含 window frame. 其中x(),y0,frameGeometry(), pos(),move() 都是按照包含 window frame 的方式来计算 的. 其中 geome…...

PCB 赋能机器人技术革新:核心功能与前沿趋势
一、智能控制中枢的异构集成 采用 20 层刚挠结合板架构,搭载 NVIDIA Jetson AGX Orin SoC(100TOPS 算力),集成 64 位 ARMv8 内核与 32GB 内存,实现多模态传感器数据融合与实时决策。板载 128MB DDR4 缓存支持 μs 级响…...

unity 环形UI菜单实现方法2
在项目中需要一个环形UI并且循环往复的效果,这个方法思路为提前预设好位置,让UI根据坐标预设的移动,然后使用mask遮罩达到循环往复效果的目的。 下图分别分为了三个列表 第一个列表poslist是提前预设的位置 第二个列表为背景暂时不用看 第三个…...

Redis进阶--主从复制
目录 一、引言 二、介绍 三、解决问题 四、配置主从复制 1.复制 全量复制: 部分复制: 实时复制: 五、总结 一、引言 本篇文章将继续介绍Redis中的主从复制机制 二、介绍 主从复制是在分布式系统中实现的,希望有多个服务器…...

Redisson分布式锁:原理、使用
1. Redisson简介 Redisson是一个基于Redis的Java客户端库,提供了丰富的分布式对象和服务(如分布式锁、信号量、Map等)。其核心优势在于简化分布式锁的实现,并解决了原生Redis分布式锁的常见问题(如死锁、误删…...