利用新一代雷达传感器增强ADAS系统的检测和计算(TI文档)
摘要
德州仪器 (TI) 的新一代雷达传感器AWR2E44P和AWR2944P推动了TI的ADAS雷达产品系列发展,专注于提 高性能以满足严格的 NCAP(新车评估计划)和 FMVSS(联邦机动车辆安全标准)自动驾驶和安全法规。这些雷 达器件为 AWR2944 平台带来了"性能"扩展,融合了射频和计算功能方面的重大进步,可满足 ADAS 应用不断发展的需求。AWR2E44P 和 AWR2944P 利用内部优化的工艺技术,旨在通过提供更好的 SNR、更高的处理能力和 更大的存储容量来增强角雷达和前置雷达传感器的功能,从而满足联合国第 79 号条例 (UN R79) 的需求。这些改进扩大了检测距离,提高了角度精度,并在跟踪和分类等应用中实现了更复杂的处理算法。此外,它还让用户能 够处理计算密集型 AI/ML任务(例如,雷达感知),以及信号处理算法。
TI 的专有 LoP(封装上装载)技术目前属于第二代,它进一步增强了射频性能,帮助器件保持制造差异的稳健 性,同时提高了成本效益。由软件组件提供支持的硬件评估模块易于使用,能够缩短开发周期。这些新型雷达器 件保持与上一代器件的向后兼容性,简化了过渡过程,尽可能地降低了风险,节省了开发成本并缩短了安全认证 时间。本白皮书重点介绍了AWR2E44P和 AWR2944P雷达传感器如何建立新的性能基准,为OEM 提供功能强大、可靠的器件,以满足未来 ADAS 要求并提高自主驾驶能力,同时不影响软件的可重用性和可扩展性。
1 引言
汽车行业向更高的自动驾驶等级转变,要求雷达传感器满足严格的安全和性能标准。雷达技术在为 ADAS 提供实时数据以及支持 ACC(自适应巡航控制)、LCA(车道变换辅助)、防撞等车辆功能方面发挥着关键作用。随着车辆不断发展以满足日益增长的监管和消费者期望,雷达传感器必须扩展检测范围,提高物体识别分辨率,并支持强大的数据处理功能。AWR2E44P和 AWR2944P传感器通过性能、计算能力和制造质量方面的关键技术进步来满足这些需求,为高性能、经济高效的雷达系统建立了新标准。AWR2E44P 支持 TI 的LoP天线接口,而 AWR2944P支持PCB天线接口。
2 ADAS雷达市场趋势和需求发展
五到六年前,ADAS市场要求OEM在其车辆中提供NCAP BSD(盲点检测)、ACC(自适应巡航控制)和AEB(自动紧急制动),检测范围约为150至 200 米。OEM的架构主要依赖数据速率限制高达 6-8Mbps且具有CAN-FD接口的边缘传感系统。如今,随着UN R79的推出,市场趋势朝着更严格的NCAP要求加速:角雷达和前雷达的距离要求提高了30-40%,而仰角检测等新增功能现在必不可少。OEM的架构也已转变为高速以太网接口,支持高达100Mbps 或更高的数据速率。为顺应这些趋势,引入了AWR2944雷达传感器,它提供了增强型配置,包括四个接收通道和四个发送通道。展望未来,雷达传感器必须满足更高的标准以支持 3 级和自动驾驶,包括区分静态物体和改进物体分类的复杂检测功能。这些系统需要优化SNR,重点在于降低噪声系数,而不仅仅是升高输出功率,因为如果场景中存在障碍物或大型物体,仅升高输出功率会增加散热挑战和本底噪声挑战。 AWR2944P和AWR2E44P雷达传感器利用TI专有的增强型工艺和第二代LoP技术,实现更高的SNR和增强型计算性能,支持高速公路上和十字路口的免注视、免手扶自动驾驶等复杂场景。
3 AWR2E44P和AWR2944P - 性能、处理和内存增强
AWR2E44P和AWR2944P相对于AWR2944产品系列性能得到了增强,并增强了射频性能和计算能力以满足NCAP和AD要求。图3-1展示了AWR2E44P/AWR2944P 架构的方框图。这些器件均为单芯片 76-81GHz FMCW 雷达传感器,包括:
• 4 个集成发送器
• 4 个集成接收器
• 校准引擎
• 监测引擎
• 合成器
• C66x DSP
• 硬件安全模块 (HSM)
• 硬件加速器 (HWA)
• 存储器
• 接口
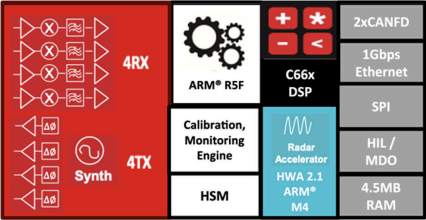
图 3-1. AWR2E44P / AWR2944P 方框图
AWR2E44P和AWR2944P改善了整体传感器SNR,增强了计算能力,增加了内存,使用了TI 第二代 LoP,实现了10倍的高数据传输速率、HSM改进和EBOM(电子物料清单)优化。
3.1 信噪比 (SNR) 改善
通过LNA(低噪声放大器)和PA(功率放大器)中的目标晶体管修改,AWR2E44P和 AWR2944P可获得2到3dB的SNR增益。这种改善对于复杂驾驶环境中的高精度检测和分类至关重要。这些目标晶体管增强功能改善了晶体管的 Ft(传输频率)和Fmax(最大振荡频率)。Ft是电流增益接近1dB或0dB时的频率。更高的Ft支持更快的时钟速度,这对于开关电路至关重要,并可改善噪声系数,从而在毫米波应用中提高前端性能。Fmax是功率增益接近零时的频率。提高 Fmax可改善晶体管增益,从而显著提升功率效率。凭借更优的Ft和Fmax,TI能够在不增加功耗的情况下实现更佳的SNR。图 3-2 展示了在AWR2944P和AWR2E44P上如何将Ft和Fmax分别相对于 AWR2944提升+20%和+10%,从而实现更高的SNR。图 3-2 和图 3-4 展示了在典型条件下, AWR2944P在输出功率和噪声系数方面实现的增强。因此,AWR2E44P和AWR2944P具有更高的信号清晰度, 这对于在高噪声环境中通过更佳的 SNR 能力进行精确检测至关重要。
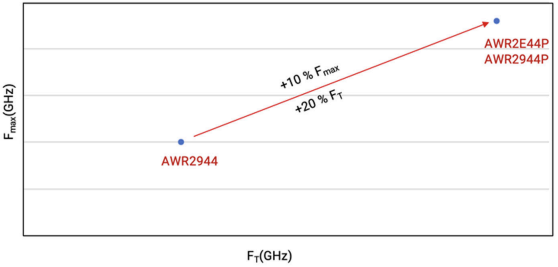
图 3-2. AWR2E44P 和 AWR2944P 的 FT 和 Fmax 增强
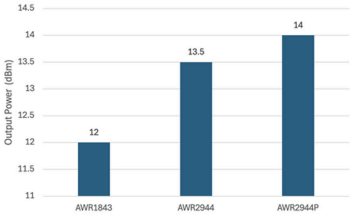
图 3-3. AWR2944P 的输出功率增强
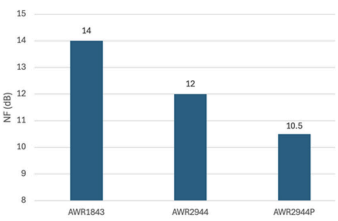
图 3-4. AWR2944P 的噪声系数增强
3.2 TI 第二代封装上装载 (LOP) 技术
TI 的 LoP 技术可以通过 PCB 内的波导将信号从封装辐射元件直接传输到 3D 天线,从而实现高效的电磁信号传 输。AWR2E44P 采用第二代优化转换,可缩短与天线元件的传输距离,改善射频性能和热管理。图 3-5 展示了第 二代 LoP 技术使用的双脊波导(与上一代使用的椭圆形波导相比)。双脊波导可将过渡尺寸缩小约 17%。这种尺 寸缩减可提高板级可靠性,从而确保在 PCB 和天线组件型号范围内实现稳定的性能。这种更紧凑的封装还可以降低射频损耗,并通过扩展天线的视场 (FoV) 提供更好的空间覆盖范围,这对于增强检测能力至关重要。
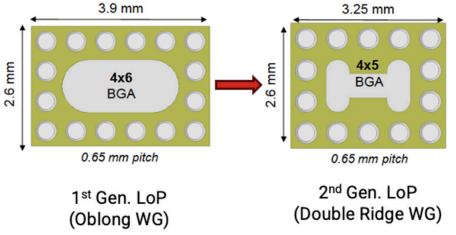
图 3-5. TI 第二代技术中的增强
3.3 提高计算能力
AWR2E44P 和 AWR2944P 将处理计算增加大约 30%。这对于促进和改进复杂的后处理算法(如跟踪、聚类和分类)、从而为 ADAS 决策提供先进数据非常重要。这种计算能力让这些产品能够处理额外的AI和ML任务。如同雷达感知以及信号处理算法。表3.1 AWR2944P 和 AWR2E44P 的计算增强显示了相对于 AWR2944 在 AWR2944P 和 AWR2E44P 上实现的计算增强。
表3.1 AWR2944P 和 AWR2E44P 的计算增强

3.4 扩展了雷达数据立方体的存储器
AWR2944P 和 AWR2E44P 的存储器容量比 AWR2944 高 20%。实现更大的雷达数据存储容量,并支持高分辨率数据分析。
3.5 1Gbps 以太网接口
随着 SNR 升高,物体检测次数也会增加,而更高的以太网带宽可提供更强的数据传输能力。AWR2E44P 和 AWR2944P 具有数据速率为 1Gbps 的专用以太网 IP,可确保在 ADAS 系统之间实现无缝的数据通信,并满足互联车辆系统的高速要求。
3.6 增强安全性和可靠性
集成硬件安全模块 (HSM) 支持 AES-256、SHA-512、PLA、TRNG、SM2/3/4 等高级加密算法,从而满足自主应用更高的数据完整性和严格的网络安全要求。
3.7 eBOM 优化
AWR2E44P 和 AWR2944P 提供 25MHz 时钟输出,它可替代以太网 PHY 芯片的外部晶体,从而优化雷达传感器模块的电子物料清单 (EBOM)。
4 不影响软件可扩展性和可重用性
软件是 TI 产品中不可或缺的部分。AWR2E44P 和 AWR2944P 通过了 TÜV SÜD 按照 ISO 26262 和 IEC 61508 进行的功能安全软件开发认证。为了缩短开发周期并减少安全认证时间,AWR2E44P 和 AWR2944P 随附有参考代码,可供客户使用以下软件包实现其客户应用。
下面的大部分软件都通过 TI.com TI-REX (TI Resource Explorer) 提供,后者是供应TI用例特定参考应用、SBL 工具、详细文档 (TI Radar Academy) 和培训材料的一站式商店。
4.1 软件开发套件
AWR2E44P 和 AWR2944P 附带 MCU Plus SDK,其中包含带有应用示例的 SoC 外设驱动程序,以及支持 UART、CAN 和以太网的 SBL(安全启动加载程序)。要开始缩短开发周期,可以使用 OOB(开箱即用)演示和 可视化工具。
4.2 微控制器抽象层
为了更快上市,TI 提供了微控制器抽象层 (MCAL),它提供了微控制器驱动程序、内存驱动程序、通信和 IO 驱动程序以及示例应用。图 4-1 展示了采用 TI 提供的 MCAL 层的 AUTOSAR(AUTOmotive Open System Architecture,汽车开放系统架构)架构。包括 Vector 在内的众多 TI 首选合作伙伴将 TI-MCAL 与适用于第 1 层 软件版本的 AUTOSAR® 集成在一起。
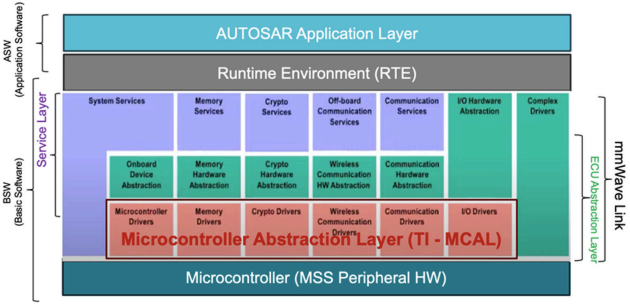
图 4-1. AUTOSAR 架构,以及 TI 提供的 MCAL 驱动程序包
4.3 毫米波 DFP(器件固件包)
TI 提供一组简洁的 API 来控制 AWR 器件的射频前端,并在适用于 TI 毫米波 DFP(器件固件包)的 ICD(接口 控制文档)中提供了全面的文档。DFP 支持从一种 AWR 型号快速迁移到另一种 AWR 硬件型号。
4.4 TI 基础安全
AWR2E44P 和 AWR2944P 附带 TIFS 封装,可加快安全功能的开发速度。客户可以使用 TIFS 作为第三方 HSM (硬件安全模块)软件开发的起点。TIFS 软件包中提供了带有示例和 HSM 运行时参考应用程序的加密加速器驱动程序。
4.5 安全诊断库
AWR2E44P 和 AWR2944P 附带 TI SDL(安全诊断库),可轻松实现安全诊断功能,并加快安全认证的开发,同时在安全手册中提供详细文档。
5 AWR2E44P 评估和测量
AWR2E44P 和 AWR2944P 器件随附有易于使用的评估模块 (EVM),可直接连接到 DCA1000EVM 进行原始数据采集。图 5-1 展示了安装了 3D 波导天线的 AWR2E44PEVM。此 EVM 套件包含开始为片上 C66x DSP、ARM® Cortex®-R5F 控制器和硬件加速器 (HWA 2.1) 开发软件所需的一切资源。随附的几项调试功能可帮助您进行软件开发和硬件评估。其中包括板载 XDS110、CAN-FD 收发器、以太网 PHY、温度和电流传感器,以及用于连接 DCA1000EVM 或外部调试器的高速连接器。图 5-2 展示了在 AWR2E44PEVM 上测得的方位角和仰角天线方向图测量值。
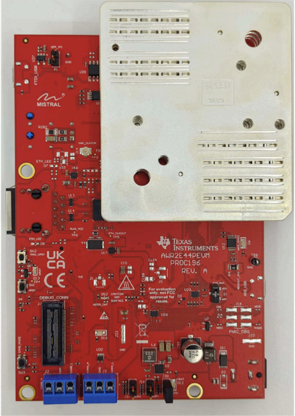
图 5-1. 具有 3D 波导天线的 AWR2E44P 评估模块
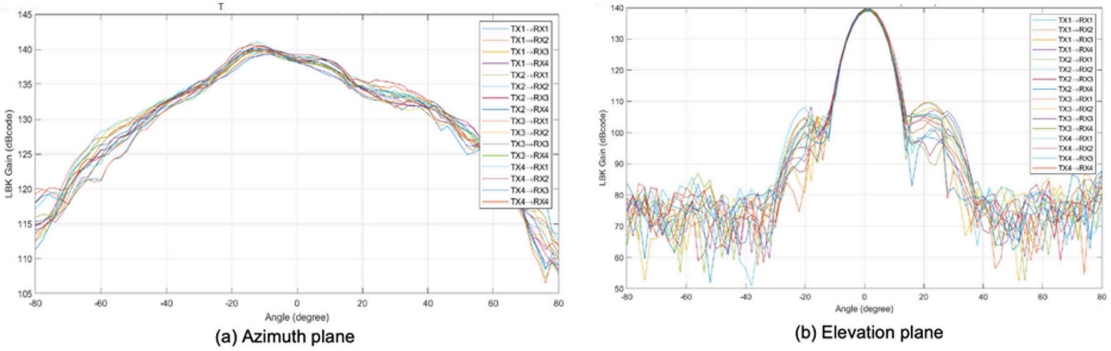
图 5-2. AWR2E44P 天线在方位角和仰角平面上的测量结果
6 总结
AWR2E44P 和 AWR2944P 雷达传感器代表着 ADAS 雷达技术的一次飞跃,在检测距离、角度精度和计算能力方面可获得更高的性能。这些器件采用专有处理技术(包括先进的晶体管优化和先进的第二代 LoP 封装),能够经济实惠地满足汽车行业对更高精度和可靠性不断发展的需求。这些新型雷达传感器在硬件和软件方面与以前的型号兼容,提供了无缝的升级路径,从而降低 OEM 开发成本并加快产品上市速度。通过硬件性能的持续创新,结合可扩展且可重复使用的软件,TI 正在帮助塑造 ADAS 和自动驾驶的未来,打造更安全、响应更灵敏且更智能的车辆。
相关文章:
)
利用新一代雷达传感器增强ADAS系统的检测和计算(TI文档)
摘要 德州仪器 (TI) 的新一代雷达传感器AWR2E44P和AWR2944P推动了TI的ADAS雷达产品系列发展,专注于提 高性能以满足严格的 NCAP(新车评估计划)和 FMVSS(联邦机动车辆安全标准)自动驾驶和安全法规。这些雷 达器件为 AWR…...

前端工程化开篇
前端发展史梳理: 最早的html,css,js是前端三剑客,足以实现所有的前端开发任务,但是呢,一个简单的前端交互效果可能就需要一大堆的代码去实现。 后来呢,有了前端库jQuery,他可以使前…...

Android 问真八字-v2.1.7[看八字APP]
Android 问真八字 链接:https://pan.xunlei.com/s/VOMMuCVQRQrM2vRsHj14SsO0A1?pwdavzw# Android 问真八字-v2.1.7[看八字APP]...

go - grpc入门
前期准备 工具安装及使用 grpc开发 编写proto文件 proto文件是符合Protocol Buffers语言规范的数据交换协议文件,就像以前WebService定义服务时使用的XML文件。现在一般都是用proto3了,这里创建一个名为 hello.proto 的文件,放到项目的pr…...

Linux操作系统配置本地yum源和定时任务
操作系统环境:CentOS 7.2 本地yum源配置 1.挂载镜像 mount /dev/cdrom /mnt/cdrom 2.备份原yum配置 mv /etc/yum.repos.d /etc/yum.repos.d.bak 3.创建本地yum源配置文件 mkdir /etc/yum.repos.d vi /etc/yum.repos.d/CentOS-local.repo 添加内容: #本…...

【活动回顾】StarRocks Singapore Meetup #2 @Shopee
3 月 13 日,StarRocks 社区在新加坡成功举办了第二场 Meetup 活动,主题为“Empowering Customer-Facing Analytics”。本次活动在 Shopee 新加坡办公室举行,吸引了来自 Shopee、Grab 和 Pinterest 的专家讲师以及 50 多位参会者。大家围绕电商…...

优选算法——双指针专题
本章先分享关于优选算法的双指针的思路: 主要是以题目来展示常见使用双指针的思路。 ps: 双指针做法:不要被表面所迷惑,它其实是通过用一个数组的下标来充当指针 数组分两块:是⾮常常⻅的⼀种题型,主要就是根据⼀种…...

深度解析:TOML、XML、YAML及其他配置/数据格式对比
深度解析:TOML、XML、YAML及其他配置/数据格式对比 在软件开发和系统配置中,选择合适的配置或数据格式至关重要。本文将对比 TOML、XML、YAML 等常见格式,梳理它们的核心特性、适用场景及区别,并扩展介绍其他类似格式,…...

冗余技术:堆叠技术+链路聚合
目录 前言 一.堆叠技术概述 二.堆叠技术原理 三.堆叠系统登录 四.堆叠合并/分裂 4.1 堆叠双主检测机制(MAD) 五.链路聚合技术概述 六.链路聚合模式 前言 在硬件加速与数据爆炸时代,堆叠技术通过模块化分层设计,实现资源动…...

存储服务器是指什么
今天小编主要来为大家介绍存储服务器主要是指什么,存储服务器与传统的物理服务器和云服务器是不同的,其是为了特定的目标所设计的,在硬件配置方式上也有着一定的区别,存储空间会根据需求的不同而改变。 存储服务器中一般会配备大容…...
)
文件上传绕过的小点总结(8)
16.apache解析漏洞条件竞争 class MyUpload{.................. var $cls_arr_ext_accepted array(".doc", ".xls", ".txt", ".pdf", ".gif", ".jpg", ".zip", ".rar", ".7z",&q…...

设计模式-结构型模式-外观模式
概述 外观模式 : Facade Pattern : 是一种 结构型设计模式. 它为复杂子系统提供一个简化的统一接口,使得客户端无需直接与子系统的各个组件交互,从而降低系统的耦合性。 核心思想 统一接口:将多个子系统的复杂操作封装到一个“外观类”中&…...

DeepSeek 本地部署指南
文章目录 DeepSeek 本地部署指南一、前言二、部署前的准备工作2.1 硬件要求2.2 软件环境 三、模型下载四、本地部署步骤4.1 检查硬件加速支持4.2 部署模型4.3 优化部署 五、常见问题及解决方法5.1 内存不足5.2 模型下载失败5.3 GPU 无法使用 六、总结 DeepSeek 本地部署指南 一…...

Windows Server 2025 使用 IIS 搭建 ASP.NET 3.5 网站
开启远程桌面 参考文章Windows server开启远程桌面教程打开服务管理器。ECS 配置安全组,开启 3389Telnet 验证网络联通性 telnet x.x.x.x 338安装 Windows App,登录验证 安装 ASP.NET 3.5 1.参考文章Windows Server 2012安装 .NET Framework 3.5和 Wi…...
)
python每日十题(12)
根据字典的索引方式可知,d.get( egg ,no this food)索引的是字典第一层,但是第一层只有键food,没有键egg,故索引不出值,输出的是“no this food ”。 外层for循环是将a[0][1,2,3],a[1][4,5,6],a[2][7,8,9]依次赋给变量…...

Podman 学习总结
Podman 概述 什么是 Podman? Podman(Pod Manager)是一个开源的容器管理工具,类似于 Docker,可以用于拉取、运行、管理容器镜像。Podman 采用 无守护进程****(Daemonless) 的架构,使…...
)
作业14 (2023-05-22_const修饰指针)
第1题/共5题【单选题】 C程序常见的错误分类不包含:( ) A.编译错误 B.链接错误 C.栈溢出 D.运行时错误 回答正确 答案解析: 栈溢出是运行时错误的一种,因此C程序不会将栈溢出错误单独列出来,栈溢出包含在运行时错误中。 因此:选择C 第2题/共5题【单选题】 以下关于…...

Qt 线程和 QObjects
线程和 QObjects QThread 继承于 QObject。 它发出信号来指示线程开始或结束执行,并提供一些插槽。 更有趣的是,QObjects 可以在多个线程中使用,发出信号以调用其他线程中的插槽,并向 "生活 "在其他线程中的对象发布事件…...

cocos creator 笔记-路边花草
版本:3.8.5 实现目标:给3d道路生成路边景观花草 在场景下创建一个节点,我这里种植两种花草模型,兰花和菊花,所以分别在节点下另创建两个节点,为了静态合批。 1.将花草模型分别拖入场景中,制作…...

基于SpringBoot+Vue3实现的宠物领养管理平台功能十六
一、前言介绍: 1.1 项目摘要 随着社会经济的发展和人们生活水平的提高,越来越多的人开始关注并参与到宠物领养中。宠物已经成为许多家庭的重要成员,人们对于宠物的关爱和照顾也日益增加。然而,传统的宠物领养流程存在诸多不便&a…...
-05-MOSN 平滑升级原理解析)
MOSN(Modular Open Smart Network)-05-MOSN 平滑升级原理解析
前言 大家好,我是老马。 sofastack 其实出来很久了,第一次应该是在 2022 年左右开始关注,但是一直没有深入研究。 最近想学习一下 SOFA 对于生态的设计和思考。 sofaboot 系列 SOFAStack-00-sofa 技术栈概览 MOSN(Modular O…...

数据仓库pinia中,getter和actions有什么区别
将计算逻辑放在 getters 还是 actions 里,取决于具体的使用场景和需求,下面详细分析放在 getters 中的优势以及和 actions 的区别,以说明是否有必要放在 getters 里: 1. getters 的优势 缓存特性 getters 具有类似 Vue 计算属性…...

RoMA: 基于Mamba的遥感基础模型, 已开源, 首次验证mamba的scaling能力
Time: 2025-03-27T15:27:00 github: 链接 HuggingFace: 链接 摘要 近年来,自监督学习在视觉 Transformer(ViT)方面的进展推动了遥感(RS)基础模型的突破。然而,自注意力机制的二次复杂度给可扩展性带来了…...
嵌入式第十一届设计与开发科目模拟试题)
蓝桥杯(电子类)嵌入式第十一届设计与开发科目模拟试题
一、功能概览 二、分模块实现 1、按键 新建interrupt.h和interrupt.c写中断的代码(写法学习来自定时器-按键单击_哔哩哔哩_bilibili) #ifndef __INTERRUPT_H #define __INTERRUPT_H#include "main.h" #include "stdbool.h"struct…...

CMLINK APN 手动设置
以下是针对 CMLINK 的 APN设置 的详细指南,基于常见配置需求: CMLINK APN 手动设置参数 参数项值说明名称CMLINK (自定义)任意命名(如 CMLINK、CM Internet 等),建议使用ASCII字符,无特殊符号。APNcm.com …...

排序--快排--非递归法
一,引言 快排不管是hoare法还是指针法以及挖坑法,最终都是利用函数递归进行实现的,但是只要是函数递归就会有栈溢出的风险,为此本篇文章讲解快排的非递归法。 二,代码逻辑 首先要了解为什么会使用递归进行调用&…...

02 相机标定相关坐标系
标定相关坐标系 一共四个坐标系 图像像素坐标系: u-v,图像左上角为原点图像物理坐标系: x-y,图像中心为原点...

数学建模:MATLAB卷积神经网络
一、简述 卷积神经网络是一种处理具有网格结构数据的深度学习模型,由输入层、卷积层、池化层、全连接层、输出层组成。 输出层:将图像转换为其对应的由像素值构成的二维矩阵,并存储二维矩阵 卷积层:提取图像的底层特征…...

Android读写权限分析
Android系统使用的是Linux内核,所以Android系统沿用了linux系统的那一套文件读写权限。 目录 1,权限解读1.1,权限分为三种类型:1.2,权限针对的三类对象:1.3,文件和目录的权限区别1.3.1…...

计算机网络基础:量子通信技术在网络中的应用前景
计算机网络基础:量子通信技术在网络中的应用前景 一、前言二、量子通信技术基础2.1 量子通信的基本概念2.2 量子通信的主要原理2.2.1 量子密钥分发(QKD)原理2.2.2 量子隐形传态原理三、量子通信技术的特点3.1 绝对安全性3.2 超高通信速率潜力3.3 抗干扰能力强四、量子通信技…...
)
【算法学习计划】贪心算法(上)
目录 前言(什么是贪心) leetcode 860.柠檬水找零 leetcode 2208.将数组和减半的最少操作次数 leetcode 179.最大数 leetcode 376.摆动序列 leetcode 300.最长递增子序列 leetcode 334.递增的三元子序列 leetcode 674.最长连续递增序列 leetcode …...
示例说明)
Linux 目录结构(文件系统结构)示例说明
在Linux操作系统中,文件系统的结构是理解系统性能及管理的重要基础。每个目录都有它的特定用途,这使得系统管理更加清晰和高效。本文将带您逐步了解每一个重要目录及其功能。 1. 根目录 / 根目录是Linux文件系统的起点,所有文件和目录均从此…...

Linux下的socket演示程序2
server.cpp #include <stdio.h> #include <string.h> #include <stdlib.h> #include <unistd.h> #include <arpa/inet.h> #include <sys/socket.h>#define SER_PORT 8888 //服务器端口号 #define SER_IP "10.148.4.168" //服…...

TiDB与Doris实操对比:深度剖析数据库选型要点
TiDB与Doris实操对比:深度剖析数据库选型要点 宝子们,在大数据处理的广阔天地里,TiDB和Doris都是备受瞩目的数据库解决方案。它们各自有着独特的优势和适用场景,对于我们开发者来说,深入了解它们的实操特性࿰…...

How to install vmware workstation pro on Linux mint 22
概述 VMware 是一家专注于虚拟化技术和云计算解决方案的全球领先软件公司,成立于1998年,总部位于美国加州。它的核心技术是通过“虚拟化”将一台物理计算机的硬件资源(如CPU、内存、存储等)分割成多个独立的虚拟环境(…...

redis常用部署架构之redis分片集群。
redis 3.x版本后开始支持 作用: 1.提升数据读写速度 2..提升可用性 分片集群就是将业务服务器产生的数据储存在不同的机器上。 redis分片集群的架构 如上图所示,会将数据分散存储到不同的服务器上,相比于之前来说,redis要处…...
 和 Makefile 和 gdb)
vim的一般操作(分屏操作) 和 Makefile 和 gdb
目录 一. vim的基本概念 二. vim基础操作 2.1 插入模式 aio 2.2 [插入模式]切换至[正常模式] Esc 2.3[正常模式]切换至[末行模式] shift ; 2.4 替换模式 Shift R 2.5 视图(可视)模式 (可以快速 删除//注释 或者 增加//注释) ctrl v 三&…...

DeepSeek 为何能在短时间内超过 ChatGPT?—— 技术变革与成本重构的双重胜利
2025 年 1 月 27 日,全球科技圈见证了一个历史性时刻:中国 AI 公司深度求索(DeepSeek)开发的同名应用,首次登顶美国苹果 App Store 免费下载榜,超越了长期霸榜的 ChatGPT。这一突破不仅打破了美国科技公司在…...

Wireshark学习
Wireshark简介 抓包前 1.打开wireshark得到下面的界面 2.选择菜单栏上捕获-> 选项,勾选WLAN网卡(这里需要根据各自电脑网卡使用情况选择,简单的办法可以看使用的IP对应的网卡)。点击开始。启动抓包。 3.wireshark启动后&am…...

我的创作纪念日——三周年
大家好,心心念念的三年之气已到,但是我似乎对于博客专家的身份没有那么渴望了哈哈。虽然最近比较忙,但是看到三周年纪念日的通知,还是想写一点什么,并不是因为三周年有多么值得纪念,而是这段时间确实有一些…...

Softmax 回归 + 损失函数 + 图片分类数据集
Softmax 回归 softmax 回归是机器学习另外一个非常经典且重要的模型,是一个分类问题。 下面先解释一下分类和回归的区别: 简单来说,分类问题从回归的单输出变成了多输出,输出的个数等于类别的个数。 实际上,对于分…...

基于云服务器的数仓搭建-hive/spark安装
mysql本地安装 安装流程(内存占用200M,升至2.1G) # 将资料里mysql文件夹及里面所有内容上传到/opt/software/mysql目录下 mkdir /opt/software/mysql cd /opt/software/mysql/ # 待上传文件 install_mysql.sh mysql-community-client-8.0.3…...

YOLO历代发展 图像增强方式 架构
YOLO1 YOLOV5 数据增强 mosaic 仿射变换(Affine)、透视变换(Perspective) 网络搭建...

Spring AI Alibaba EmbeddingModel使用
一、嵌入模型 (Embedding Model)简介 1、核心概念 嵌入模型(EmbeddingModel)是嵌入过程中采用的模型。 当前 EmbeddingModel的接口主要用于将文本转换为数值向量,接口的设计主要围绕这两个目标展开: 可移植性: 该接口…...
)
C++入门五式——类和对象(下)
目录 再探构造函数——初始化列表 类型转换 static成员 友元函数 内部类 匿名对象 再探构造函数——初始化列表 之前我们实现构造函数时,初始化成员变量主要使用函数体内赋值,构造函数初始化还有一种方式,就是初始化列表。 //初始化列…...
的使用说明,包含语法、示例和常见场景)
Spring的SPEL(Spring Expression Language)的使用说明,包含语法、示例和常见场景
以下是Spring的SPEL(Spring Expression Language)的使用说明,包含语法、示例和常见场景: 1. 基本语法 变量引用 表达式:#{变量名}(如#{systemProperties[os.name]})作用域:在Sprin…...

Linux应用:线程进阶
线程同步之信号量 信号量(Semaphore)是一个整型的计数器,用于控制对共享资源的访问。它通过 PV 操作来实现同步,P 操作将信号量的值减 1,如果值小于 0 则线程阻塞;V 操作将信号量的值加 1,如果…...
)
策略模式 (Strategy)
策略模式 (Strategy) 应用场景:用于处理不同的任务配置参数。在你的任务中,可能会有不同的任务类型,每个任务类型可能有不同的单位(比如米、毫米)或不同的处理方式。策略模式可以让你根据不同的任务类型选择不同的处理…...
----替换主干网络之UniRepLKNet)
【YOLOv8】YOLOv8改进系列(10)----替换主干网络之UniRepLKNet
主页:HABUO🍁主页:HABUO 🍁YOLOv8入门改进专栏🍁 🍁如果再也不能见到你,祝你早安,午安,晚安🍁 【YOLOv8改进系列】: YOLOv8改进系列࿰…...

mathtype一些用法总结
1.一个是公式旁边加入||,一般使用键盘直接打入的会比较小,mathtype中的会好看很多,打开这个栏目,会看到有很多。 2.另外是带^符号,在字符上面带没有办法直接带,所以可以在mathtype中先加帽子,然…...