基于YOLOv10深度学习的公共安全持刀行为检测系统研究与实现(PyQt5界面+数据集+训练代码)
随着社会的不断进步和城市化进程的加快,人口密度的增加和社会结构的复杂化使得公共安全问题日益凸显。近年来,各类公共安全事件频发,其中持刀行为作为一种典型的暴力行为,已成为威胁公共安全的严重因素之一。这种行为在公共场所发生时,不仅会对个人生命安全造成直接威胁,还可能引发更大规模的社会恐慌和混乱。因此,如何有效且迅速地对持刀行为进行检测和预警,已经成为维护公共安全和社会秩序的重要课题。
为了应对这一挑战,本研究基于YOLOv10深度学习模型,设计并实现了一套公共安全持刀行为检测系统。YOLOv10作为目标检测领域的最新发展版本,具备强大的实时检测能力和准确性,能够在复杂的场景中快速识别目标对象。本系统利用YOLOv10的优势,对视频监控中的持刀行为进行精确定位和分类,实现实时检测功能。
在系统实现过程中,我们采用了PyQt5框架作为前端开发工具,为用户提供了一个直观、友好的图形用户界面。通过该界面,用户可以轻松加载视频数据,实时查看系统的检测结果,并对监控区域内的持刀行为进行动态追踪和预警。帮助相关人员及时采取应对措施。此外,系统还支持检测结果的存储,便于后续的分析和证据保留。
为了确保系统的检测准确率和鲁棒性,我们使用了实际的监控视频数据集对系统进行了充分的训练和测试。通过对不同场景和角度的视频数据进行标注和训练,系统能够在复杂的环境中有效识别持刀行为,并避免因光线、遮挡等因素导致的误检和漏检。实验结果表明,本系统在持刀行为检测中的准确率和召回率均达到较高水平,同时具备较强的实时性和稳定性,能够在大多数公共场所监控应用中有效运行。
算法流程

项目数据
通过搜集关于数据集为各种各样的脑肿瘤相关图像,并使用Labelimg标注工具对每张图片进行标注,分1个检测类别,分别是knife表示 “持刀”。
目标检测标注工具
(1)labelimg:开源的图像标注工具,标签可用于分类和目标检测,它是用python写的,并使用Qt作为其图形界面,简单好用(虽然是英文版的)。其注释以 PASCAL VOC格式保存为XML文件,这是ImageNet使用的格式。此外,它还支持 COCO数据集格式。
(2)安装labelimg 在cmd输入以下命令 pip install labelimg -i https://pypi.tuna.tsinghua.edu.cn/simple
![]()
结束后,在cmd中输入labelimg
![]()
初识labelimg

打开后,我们自己设置一下
在View中勾选Auto Save mode

接下来我们打开需要标注的图片文件夹
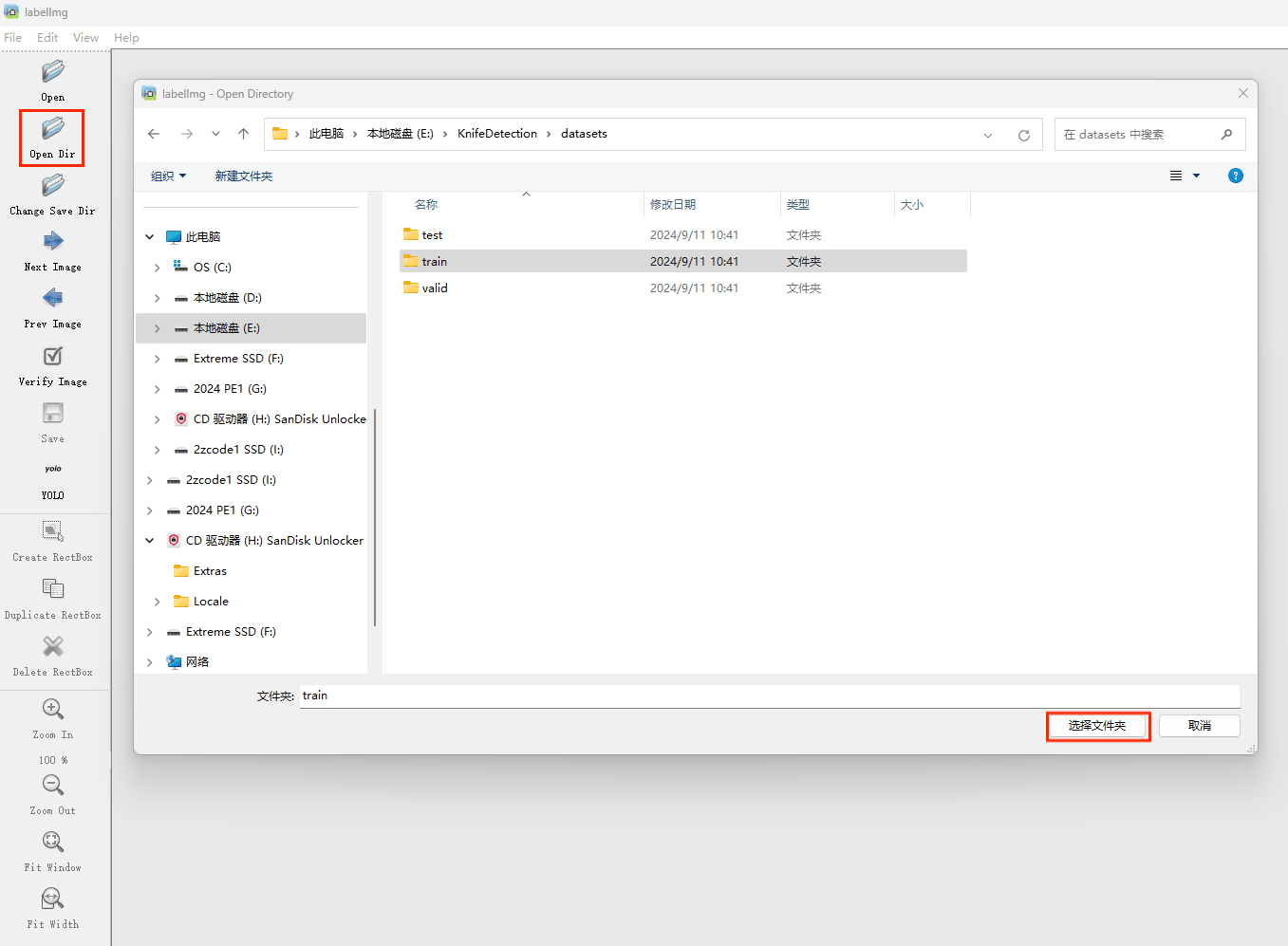
并设置标注文件保存的目录(上图中的Change Save Dir)
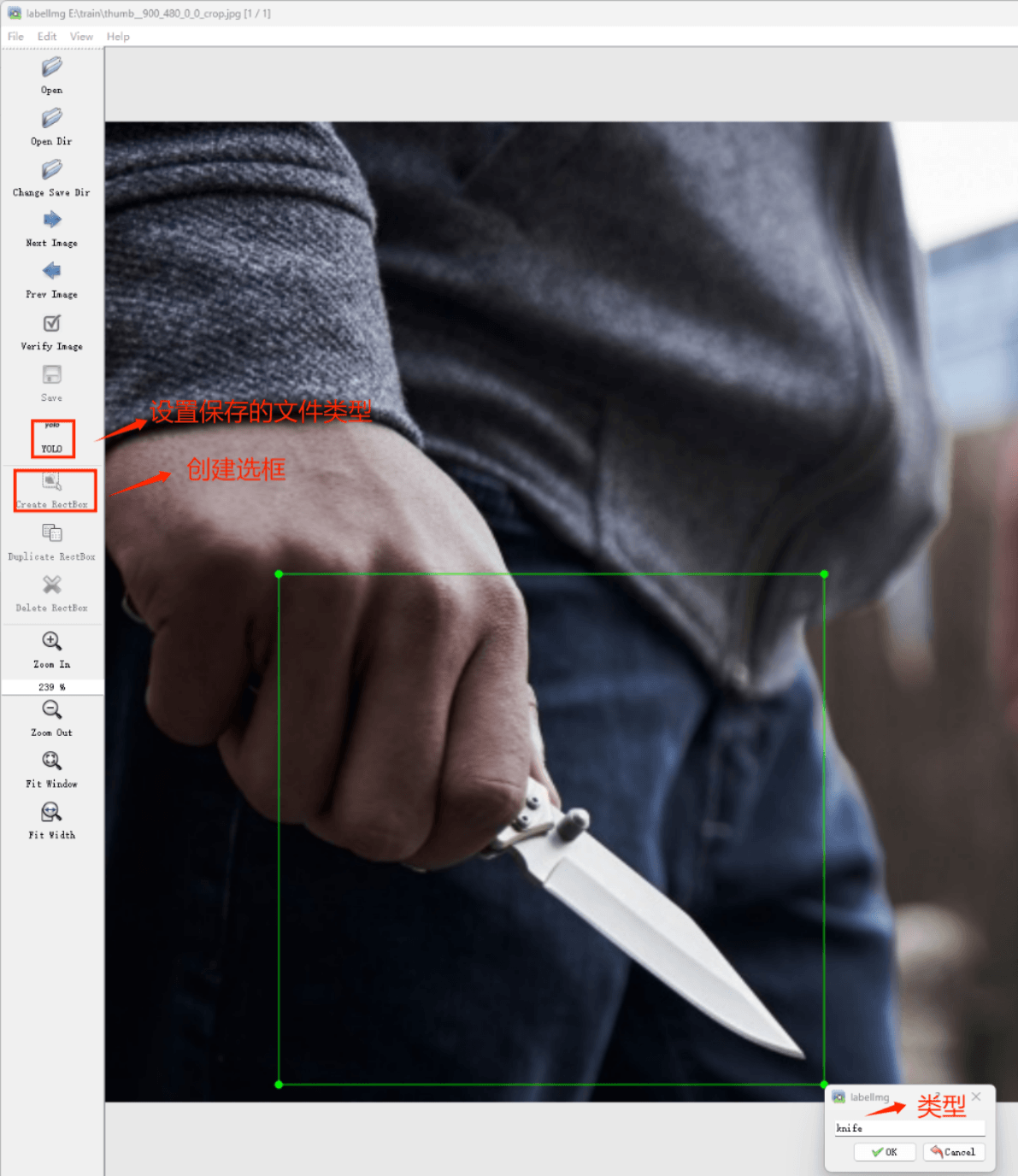
接下来就开始标注,画框,标记目标的label,然后d切换到下一张继续标注,不断重复重复。
Labelimg的快捷键

(3)数据准备
这里建议新建一个名为data的文件夹(这个是约定俗成,不这么做也行),里面创建一个名为images的文件夹存放我们需要打标签的图片文件;再创建一个名为labels存放标注的标签文件;最后创建一个名为 classes.txt 的txt文件来存放所要标注的类别名称。
data的目录结构如下:
│─img_data
│─images 存放需要打标签的图片文件
│─labels 存放标注的标签文件
└ classes.txt 定义自己要标注的所有类别(这个文件可有可无,但是在我们定义类别比较多的时候,最好有这个创建一个这样的txt文件来存放类别)
首先在images这个文件夹放置待标注的图片,这里是一类图片,就是持刀。
生成文件如下:

“classes.txt”定义了你的 YOLO 标签所引用的类名列表。
(4)YOLO模式创建标签的样式
存放标签信息的文件的文件名为与图片名相同,内容由N行5列数据组成。
每一行代表标注的一个目标,通常包括五个数据,从左到右依次为:类别id、x_center、y_center、width、height。
其中:
–x类别id代表标注目标的类别;
–x_center和y_center代表标注框的相对中心坐标;
–xwidth和height代表标注框的相对宽和高。
注意:这里的中心点坐标、宽和高都是相对数据!!!

存放标签类别的文件的文件名为classes.txt (固定不变),用于存放创建的标签类别。
完成后可进行后续的yolo训练方面的操作。
模型训练
模型的训练、评估与推理
1.YOLOv10的基本原理
YOLOv10是YOLO最新一代版本的实时端到端目标检测算法。该算法在YOLO系列的基础上进行了优化和改进,旨在提高性能和效率之间的平衡。首先,作者提出了连续双分配方法,以实现NMS-free训练,从而降低了推理延迟并提高了模型的性能。其次,作者采用了全面的效率-准确性驱动的设计策略,对YOLO的各种组件进行了综合优化,大大减少了计算开销,并增强了模型的能力。
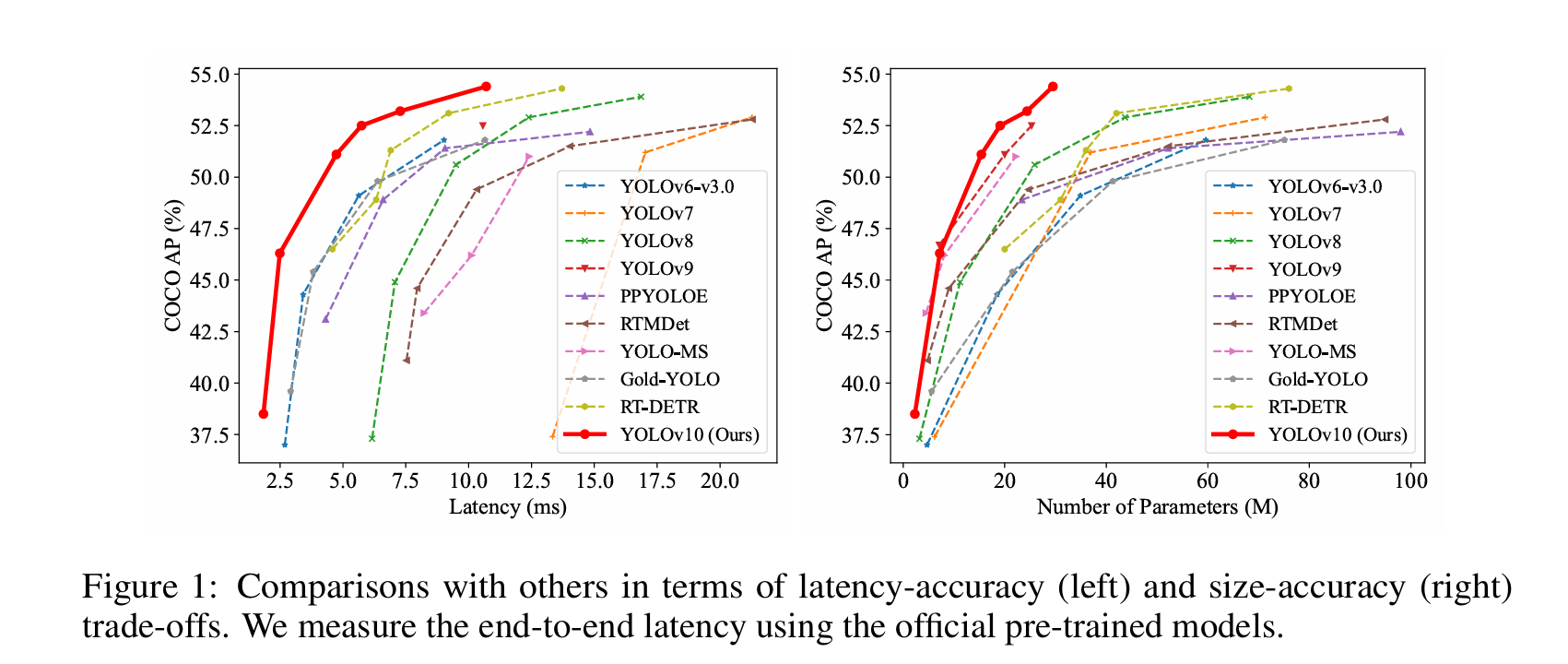
实验结果表明,YOLOv10在各种模型规模下都取得了最先进的性能和效率表现。例如,YOLOv10-S比RT-DETR-R18快1.8倍,同时拥有更小的参数数量和FLOPs;与YOLOv9-C相比,YOLOv10-B的延迟减少了46%,参数减少了25%,但保持了相同的性能水平。
YOLOv10创新点
(1)双标签分配
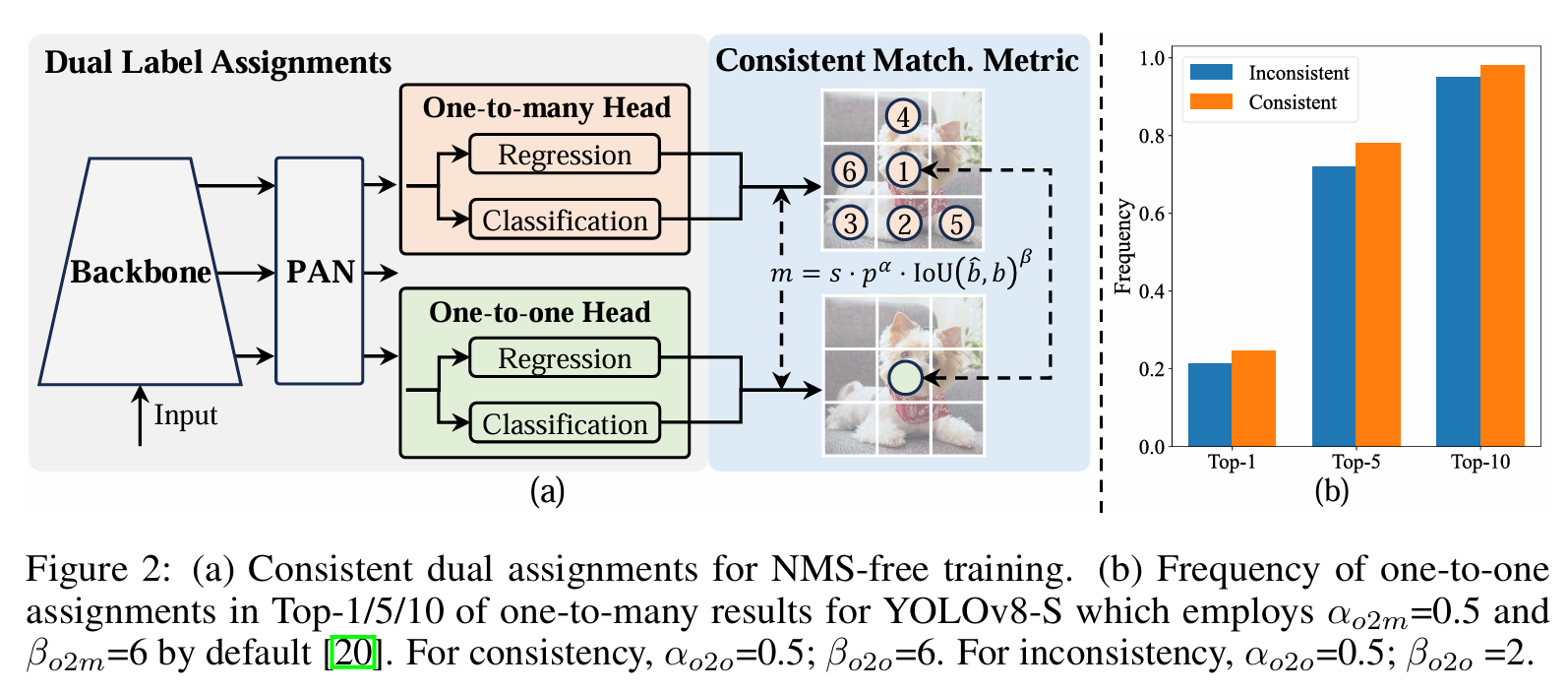
主干网络:使用增强版的CSPNet来提取图像特征,它能改善梯度流并减少计算量。
颈部:采用PAN结构汇聚不同尺度的特征,有效地实现多尺度特征融合。
一对多预测头:在训练过程中为每个对象生成多个预测,用来提供丰富的监督信号从而提高学习的准确性;在推理阶段不生效,从而减少计算量。
一对一预测头:在推理过程中为每个对象生成一个最佳预测,无需NMS操作,从而减少延迟并提高推理效率。
(2)模型设计改进
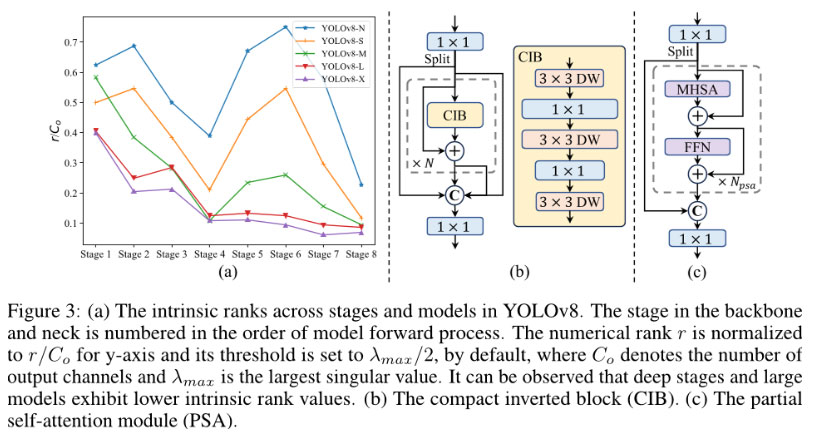
在模型设计方面,提出了以下几种改进点:
轻量级分类头: 通过对分类头进行轻量化设计,可以减少计算成本,而不会显著影响性能。
空间通道解耦降采样: 该方法通过分离空间和通道维度上的操作,提高了信息保留率,从而实现了更高的效率和竞争力。
排名引导块设计: 该方法根据各个阶段的冗余程度,采用不同的基本构建块,以实现更高效的模型设计。
大核深度卷积和部分自注意力模块: 这些模块可以在不增加太多计算开销的情况下提高模型的表现力。
2.数据集准备与训练
本研究使用了包含关于持刀相关图片,并通过Labelimg标注工具对每张图像中的目标边框(Bounding Box)及其类别进行标注。然后主要基于YOLOv10n这种模型进行模型的训练,训练完成后对模型在验证集上的表现进行全面的性能评估及对比分析。模型训练和评估流程基本一致,包括:数据集准备、模型训练、模型评估。本次标注的目标类别为持刀,数据集中共计包含3381张图像,其中训练集包含2562张图片,验证集包含207张图片、测试集包含612张图片。部分图像如下图所示:

部分标注如下图所示:

图片数据的存放格式如下,在项目目录中新建datasets目录,同时将检测的图片分为训练集与验证集放入Data目录下。
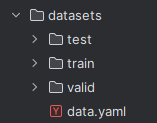
接着需要新建一个data.yaml文件,用于存储训练数据的路径及模型需要进行检测的类别。YOLOv8在进行模型训练时,会读取该文件的信息,用于进行模型的训练与验证。
data.yaml的具体内容如下:
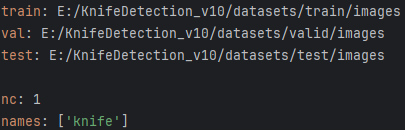
train: E:/KnifeDetection_v10/datasets/train/images 训练集的路径
val: E:/KnifeDetection_v10/datasets/valid/images 验证集的路径
test: E:/KnifeDetection_v10/datasets/test/images 测试集的路径(可选)
nc: 1 模型检测的类别数,共有1个类别。
names: [‘knife’] 表示持刀的类别
这个文件定义了用于模型训练和验证的数据集路径,以及模型将要检测的目标类别。
数据准备完成后,通过调用train.py文件进行模型训练,epochs参数用于调整训练的轮数,batch参数用于调整训练的批次大小(根据内存大小调整,最小为1)。
GPU训练代码如下:
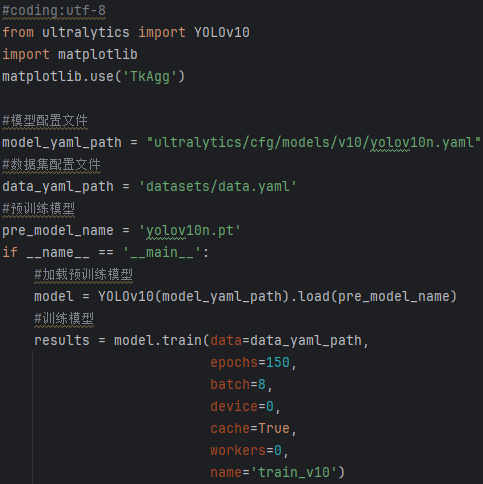
加载名为 yolov10n.pt 的预训练YOLOv10模型,yolov10.pt是预先训练好的模型文件。
使用YOLO模型进行训练,主要参数说明如下:
(1)data=data_yaml_path: 指定了用于训练的数据集配置文件。
(2)epochs=150: 设定训练的轮数为150轮。
(3)batch=8: 指定了每个批次的样本数量为8。
(4)device=0: 设定在GPU设备0上进行训练(如果有GPU)。
(5)cache=True: 设定为缓存数据集以加快训练速度。
(6)workers=0: 设定使用的并行处理线程数为0(在某些情况下,这可以避免数据加载瓶颈)。
(7)name=’train_v10′: 指定了此次训练的命名标签,用于区分不同的训练实验。
CPU训练代码如下:

加载名为 yolov10n.pt 的预训练YOLOv10模型,yolov10n.pt是预先训练好的模型文件。
使用YOLO模型进行训练,主要参数说明如下:
(1)data=data_yaml_path: 设置训练和验证数据集的路径,读取数据集配置信息。
(2)epochs=150: 设置训练的轮次为150轮。
(3)batch=8: 设置每个批次的样本数量为8。
(4)name=’train_v10′: 给训练过程命名为’train_v10’,以便于保存训练记录和结果。
3.训练结果评估
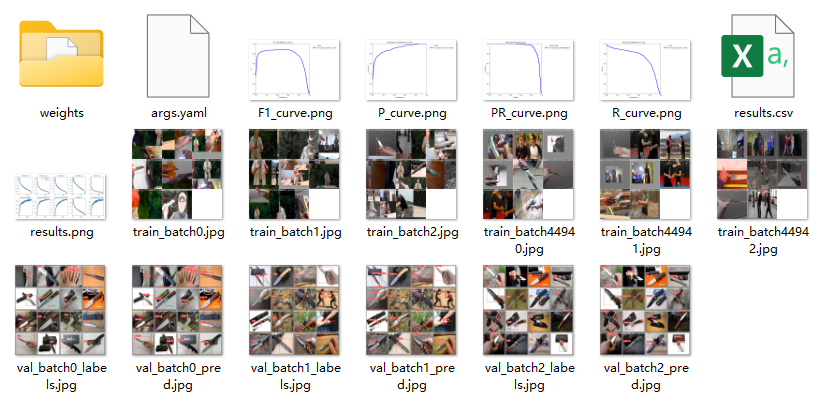
在深度学习的过程中,我们通常通过观察损失函数下降的曲线来了解模型的训练情况。对于YOLOv10模型的训练,主要涉及三类损失:定位损失(box_loss)、分类损失(cls_loss)以及动态特征损失(dfl_loss)。训练完成后,相关的训练过程和结果文件会保存在 runs/ 目录下,具体如下:
各损失函数作用说明:
定位损失box_loss:预测框与标定框之间的误差(GIoU),越小定位得越准;
分类损失cls_loss:计算锚框与对应的标定分类是否正确,越小分类得越准;
动态特征损失(dfl_loss):DFLLoss是一种用于回归预测框与目标框之间距离的损失函数。在计算损失时,目标框需要缩放到特征图尺度,即除以相应的stride,并与预测的边界框计算Ciou Loss,同时与预测的anchors中心点到各边的距离计算回归DFLLoss。这个过程是YOLOv8训练流程中的一部分,通过计算DFLLoss可以更准确地调整预测框的位置,提高目标检测的准确性。
训练结果如下:

这张图展示了YOLOv10模型在训练和验证过程中的多个重要指标的变化趋势,具体如下:
train/box_om:
(1)表示边界框的回归损失,随着训练步数增加,边界框的回归误差逐渐减小。
(2)这表明模型在定位目标时逐渐变得更加精确。
train/cls_om:
(1)表示分类损失(object的类别损失),其随着训练的推进逐步下降。
(2)说明模型在分类任务上逐渐收敛。
train/dfl_om:
(1)表示DFL(Distribution Focal Loss)损失,用于更好地学习目标的细粒度特征。
(2)曲线的下降表明模型在这方面表现的优化。
train/box_oo:
(1)与box_om类似。
(2)表示另外一部分的边界框回归损失的变化,逐渐下降表明预测精度的提升。
train/cls_oo:
(1)这是另一个分类损失的图,与train/cls_om类似。
(2)表明训练过程中的分类任务的学习效果。
metrics/recall(B):
(1)表示召回率(Recall),即模型正确识别出所有正样本的比例。
(2)随着训练的进行,召回率逐渐上升,表明模型在找到正样本方面表现更好。
metrics/mAP50(B):
(1)展示了mAP50(在IoU为0.5时的平均精度)的变化,曲线逐渐上升。
(2)表示模型的检测精度在不断提升。
metrics/mAP50-95(B):
(1)表示在不同IOU阈值(从50%到95%)下的平均精度。
(2)曲线同样逐渐上升,反映出模型的检测性能在不同严格程度下的改善。
train/dfl_oo:
(1)与dfl_om类似。
(2)表示另一种计算方式下的DFL损失,随着训练的推进,损失逐渐减小。。
metrics/precision(B):
(1)表示模型的精确率 (Precision),即所有被预测为正样本的样本中,真正正样本的比例。
(2)随着训练步数的增加,精确率逐渐上升,表明模型在减少误报的同时提高了正样本的检测准确性。
这些图展示了训练过程中模型的收敛情况,随着训练步数的增加,损失函数逐渐下降,性能指标如召回率、平均精度和精确率逐步上升,表明模型在逐步学习并优化,检测能力不断提升。
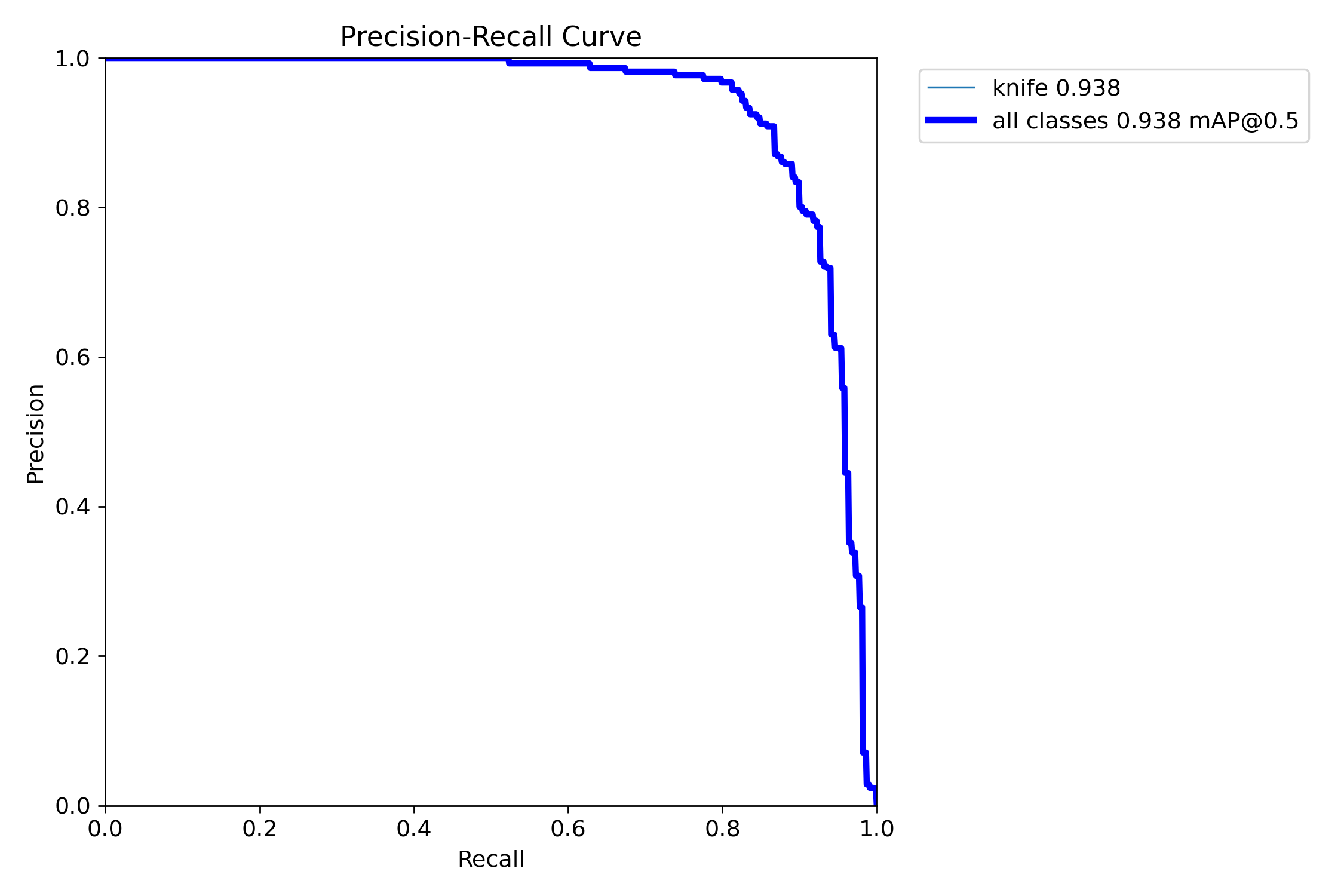
这张图展示了Precision-Recall(精度-召回率)曲线,用于评估模型在检测持刀任务中的性能。以下是这张图的具体含义:
Precision (精确率):
(1)在所有被预测为正类的样本中,实际为正类的比例。
(2)即在检测出的刀具中,真正是刀具的占比。
Recall (召回率):
(1)在所有实际为正类的样本中,被正确检测出的比例。
(2)即在所有实际存在的刀具中,成功检测出的比例。
曲线解读:
(1)图中的曲线展示了在不同的阈值下,模型在精确率和召回率之间的权衡。
(2)随着召回率增加,精确率逐渐下降,表明模型能够识别更多刀具(提高召回率),但错误检测(降低精确率)也随之增多。
(3)理想情况下,曲线会接近图形的左上角,表示模型在精确率和召回率方面都表现良好。
mAP@0.5:
(1)图例中的 0.938 mAP@0.5 表示平均精度 (Mean Average Precision, mAP) 在 IOU 阈值为 0.5 时达到了 0.938。
(2)这是检测模型性能的重要指标,mAP 越高,模型的整体检测效果越好。
(3)对于该模型,所有类别(此处仅有“knife”一类)在 mAP@0.5 下的表现是 0.938,表明模型具有很高的检测精度。
该Precision-Recall曲线展示了模型在检测刀具行为时的精确率和召回率之间的平衡。总体而言,曲线靠近左上角,并且mAP达到了0.938,表明该YOLOv10模型在刀具检测任务中具有很好的性能。
4.检测结果识别
模型训练完成后,我们可以得到一个最佳的训练结果模型best.pt文件,在runs/train/weights目录下。我们可以使用该文件进行后续的推理检测。
imgTest.py 图片检测代码如下:

引入所需库:
(1)从 ultralytics 库中导入 YOLOv10 模型类。
(2)导入 OpenCV 库用于图像的显示。
指定模型和图像路径:
(1)path 是你要加载的预训练模型的路径,这里指向 models/best.pt,即保存了最佳训练权重的模型。
(2)img_path 是你需要检测的图片路径,这里指向一个特定的测试图片。
加载预训练模型:
(1)通过 YOLOv10(path, task=’detect’) 加载 YOLOv10 预训练模型,task=’detect’ 表示这是一个检测任务。
执行检测:
(1)使用 model(img_path) 对指定的图片进行检测。检测的结果保存在 results 中。
显示检测结果:
(1)使用 results[0].plot() 生成带有检测结果的图片。
(2)然后通过 OpenCV 的 cv2.imshow() 显示结果图片,并通过 cv2.waitKey(0) 保持窗口开启直到按键按下。
此代码的功能是加载一个预训练的YOLOv10模型,对指定的图片进行目标检测,并将检测结果显示出来。
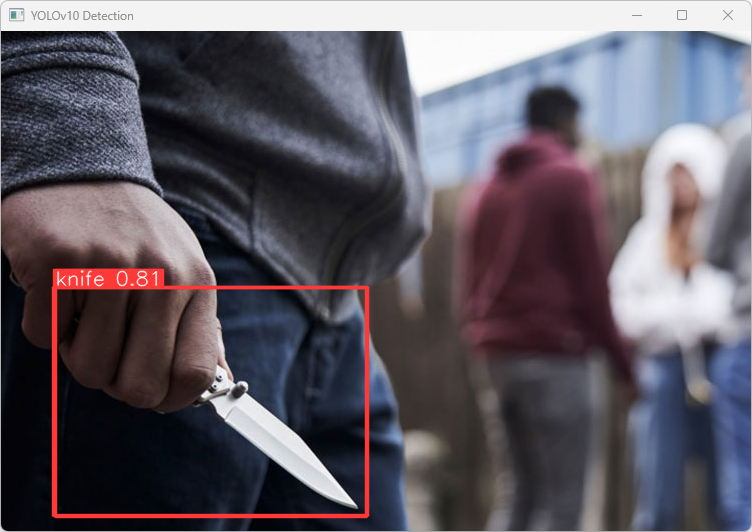
执行imgTest.py代码后,会将执行的结果直接标注在图片上,结果如下:
YOLOv10持刀检测系统的推理结果日志。以下是对该结果的解析:
图像路径:
(1)E:\KnifeDetection_v10\TestFiles\image1.jpg
– 系统对路径中的图像进行了检测。
检测结果:
(1)在大小为 448×640 的图片中检测到 1个持刀(Knife)。
(2)该检测目标的置信度为0.81。
处理速度:
(1)4.0ms preprocess:预处理阶段所用时间是 4.0 毫秒(例如图片缩放和归一化等操作)。
(2)14.5ms inference:推理阶段所用时间是 14.5 毫秒,即模型进行检测的时间。
(3)7.0ms postprocess:后处理阶段所用时间是 7.0 毫秒(例如结果框的处理和结果的格式化输出等)。
检测结果对象:
(1)boxes: 包含边界框信息。
(2)names: 目标的名称,其中 {0: ‘kinfe’} 表示检测到的类别是持刀。
原始图片信息:
(1)orig_img:原始图像的数组形式,包含了像素值。
(2)orig_shape: (500, 750):图像的原始分辨率是 500×750 像素。
保存目录:
(1)检测结果保存的目录路径为 runs\detect\predict。
从这些信息来看,模型成功地检测并标记了图片中的持刀,并给出了处理时间等相关指标。
以上关于此款智能检测系统的原理与代码介绍。基于此模型,我们用python与Pyqt5开发了一个带界面的软件系统,即运行效果的演示内容,能够很好的支持图片、视频及摄像头进行检测,同时支持检测结果的保存。
运行效果
– 运行 MainProgram.py

1.主要功能:
(1)可用于实际场景中的持刀行为检测;
(2)支持图片、视频及摄像头进行检测,同时支持图片的批量检测;
(3)界面可实时显示目标位置、目标总数、置信度、用时等信息;
(4)支持图片或者视频的检测结果保存;
2.检测参数设置:

(1)置信度阈值:当前设置为0.25,表示检测系统只会考虑置信度高于25%的目标进行输出,置信度越高表示模型对检测结果的确信度越高。
(2)交并比阈值:当前设置为0.70,表示系统只会认为交并比(IoU)超过70%的检测框为有效结果。交并比是检测框与真实框重叠区域的比值,用于衡量两个框的相似程度,值越高表明重叠程度越高。
这两个参数通常用于目标检测系统中,调整后可以影响模型的检测精度和误检率。
2.检测结果说明:

这张图表显示了基于YOLOv10模型的目标检测系统的检测结果界面。以下是各个字段的含义解释:
总目标数:
(1)表示系统检测到的目标总数,这里显示为1。
用时:
(1)表示检测耗费的时间,这里为0.016秒,说明检测速度较快
显示标签名称与置信度:
(1)表示是否显示目标的标签名称和置信度,当前已勾选。
目标选择:
(1)提供选择检测目标的选项,这里显示为全部,说明当前显示的是所有检测到的目标。
类型:
(1)表示检测到的目标类型,这里显示为持刀。
置信度:
(1)表示模型对该目标的置信度,当前为96%,说明模型对这个检测结果有较高的信心。
目标位置: 给出了检测到的目标的边界框坐标:
(1)xmin:99 表示边界框左侧的x坐标为99。
(2)ymin:103 表示边界框顶部的y坐标为103。
(3)xmax:200 表示边界框右侧的x坐标为200。
(4)ymax:229 表示边界框底部的y坐标为229。
这张图显示了一个检测系统的具体结果,包括检测到的目标数量、检测时间、目标类型、置信度以及目标在图像中的位置坐标。这类界面通常用于显示模型在图像中定位和识别到的目标,并提供相关的位置信息和置信度评分。
3.图片检测说明

点击打开图片按钮,选择需要检测的图片,或者点击打开文件夹按钮,选择需要批量检测图片所在的文件夹。
操作演示如下:
(1)点击目标下拉框后,可以选定指定目标的结果信息进行显示。
(2)点击保存按钮,会对检测结果进行保存,存储路径为:save_data目录下。
检测结果:系统识别出图片中的持刀,并显示检测结果,包括总目标数、用时、目标类型(持刀)、置信度、以及目标的位置坐标信息。
4.视频检测说明

点击视频按钮,打开选择需要检测的视频,就会自动显示检测结果,再次点击可以关闭视频。
点击保存按钮,会对视频检测结果进行保存,存储路径为:save_data目录下。
检测结果:系统对视频进行实时分析,检测到持刀并显示检测结果。表格显示了视频中多个检测结果的置信度和位置信息。
这个界面展示了系统对视频帧中的多目标检测能力,能够准确识别持刀,并提供详细的检测结果和置信度评分。
5.摄像头检测说明

点击打开摄像头按钮,可以打开摄像头,可以实时进行检测,再次点击,可关闭摄像头。
检测结果:系统连接摄像头进行实时分析,检测到持刀并显示检测结果。实时显示摄像头画面,并将检测到的持刀位置标注在图像上,表格下方记录了每一帧中检测结果的详细信息。
5.保存图片与视频检测说明
点击保存按钮后,会将当前选择的图片(含批量图片)或者视频的检测结果进行保存。
检测的图片与视频结果会存储在save_data目录下。
保存的检测结果文件如下:

(1)图片保存

(2)视频保存

– 运行 train.py
1.训练参数设置
(1)epochs 参数设置了训练的轮数。在此设置下,模型将对数据集进行150轮的训练。
(2)device=0 参数指定了在哪个设备上运行训练过程。0通常表示使用第一个GPU。
(3)这里指定训练在GPU上进行。
虽然在大多数深度学习任务中,GPU通常会提供更快的训练速度。
但在某些情况下,可能由于硬件限制或其他原因,用户需要在CPU上进行训练。
温馨提示:在CPU上训练深度学习模型通常会比在GPU上慢得多,尤其是像YOLOv10这样的计算密集型模型。除非特定需要,通常建议在GPU上进行训练以节省时间。
2.训练日志结果
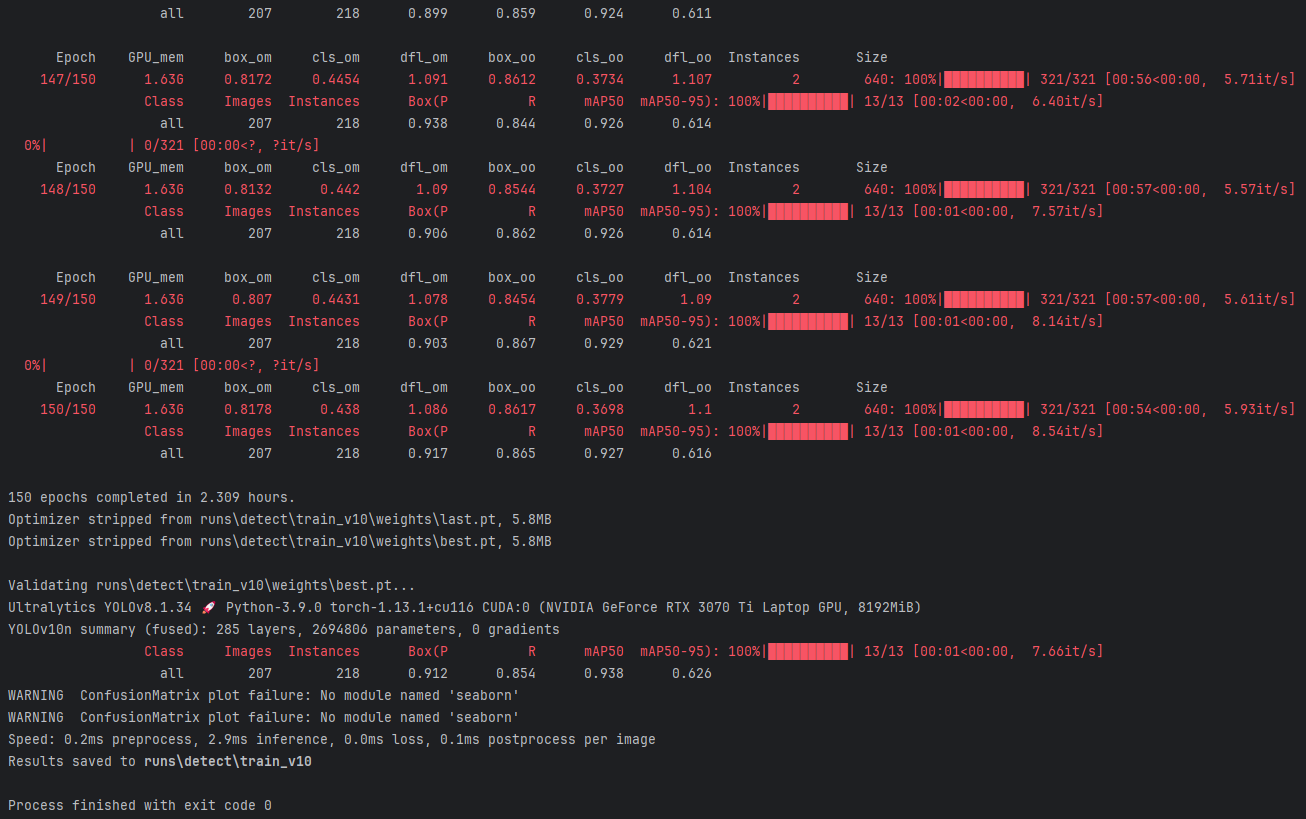
这张图展示了使用YOLOv10进行模型训练的详细过程和结果。
(1)在GPU上总共使用了2.309小时完成150个epochs的训练。
(2)显示在验证集上的最终性能,mAP50为0.938,mAP50-95为0.626,表示模型在验证集上表现非常好。
这张图显示了 YOLOv10 模型在训练过程中的进展,包括多个损失函数的优化、模型的性能指标(mAP50 和 mAP50-95)以及训练和验证的时间和速度信息。总体上,模型在训练过程中表现稳定,并且在目标检测任务上达到了较高的精度(mAP50 达到 93.8%)。
相关文章:
)
基于YOLOv10深度学习的公共安全持刀行为检测系统研究与实现(PyQt5界面+数据集+训练代码)
随着社会的不断进步和城市化进程的加快,人口密度的增加和社会结构的复杂化使得公共安全问题日益凸显。近年来,各类公共安全事件频发,其中持刀行为作为一种典型的暴力行为,已成为威胁公共安全的严重因素之一。这种行为在公共场所发…...

HP6心率血压传感器
目录 一、介绍 1、工作原理概述 2、具体实现步骤 二、HP6的通信及配置 1、通信接口 2、器件地址/命令 3、校验 三、程序设计 ①IIC通信相关基础函数 ②HP6相关基础函数 一、介绍 HP6心率血压传感器的原理主要基于光电容积脉搏波描记法(PPG)&…...

深入理解 JVM 中的 G1 垃圾收集器原理、算法、过程和参数配置
引言 Java 虚拟机(JVM)中的垃圾收集器(Garbage Collector,简称 GC)是自动内存管理的核心部分。G1(Garbage-First)垃圾收集器是 Oracle 在 JDK 7u4 版本中引入的一种新型垃圾收集器,…...

细说敏捷:敏捷四会之standup meeting
上一篇文章中,我们讨论了 敏捷四会 中 冲刺计划会 的实施要点,本篇我们继续分享敏捷四会中实施最频繁,团队最容易实施但往往也最容易走形的第二个会议:每日站会 关于每日站会的误区 站会是一个比较有标志性的仪式活动࿰…...
)
MySQL系列之身份鉴别(安全)
导览 前言Q:如何保障MySQL数据库身份鉴别的有效性一、有效性检查1. 用户唯一2. 启用密码验证3. 是否存在空口令用户4. 是否启用口令复杂度校验5. 是否设置口令的有效期6. 是否限制登录失败尝试次数7. 是否设置(超过尝试次数)锁定的最小时长8.…...

vue3封装Element Plus table表格组件
支持绝大部分Element Plus原有设置属性,支持分页,支持动态适配高度 效果展示 组件代码: <template><div class"table-wrap" ref"tableWrap"><el-tableclass"w100 h100":data"tableInfo.…...

SFP+光模块介绍
SFP光模块介绍 1 SFP光模块简介(Small Form -Factor Pluggable)2 光模块管脚定义 1 SFP光模块简介(Small Form -Factor Pluggable) 光模块(Optical Module)由光电子器件、功能电路和光接口等组成,光电子器件包括激光发射器(Laser Transmitte…...

神经网络的初始化
目录 为什么需要初始化? 初始化的常用方法: 是否必须初始化? 初始化神经网络中的权重和偏置是深度学习模型训练中非常重要的一步,虽然在某些情况下不进行初始化也能训练出模型,但正确的初始化方法能够显著提高训练效…...

数据集搜集器0.01
我们使用Python的Tkinter库来创建GUI界面,并使用requests库来从360百科获取数据。下面是一个完整的示例代码,它包括了一个简单的GUI界面,用户可以输入问题,点击按钮后会从360百科获取相关信息,并显示在同一个Text组件中…...

【Lucene】搜索引擎和文档相关性评分 BM25 算法的工作原理
BM25 算法的工作原理: 什么是 BM25 算法? BM25 是一种流行的文本检索算法,广泛用于搜索引擎和文档相关性评分。它基于概率检索模型,旨在评估查询和文档之间的相关性。 核心公式 BM25 的公式如下: score ( D , Q ) …...

嵌入式Linux——文件类型
目录 普通文件 目录文件 目录文件的权限与管理 字符设备文件和块设备文件 符号链接文件 查看符号链接 删除符号链接 修改符号链接 管道文件 匿名管道(Anonymous Pipe) 匿名管道的特点: 使用示例: 命名管道(…...

ES6 模块化语法
目录 ES6 模块化语法 分别暴露 统一暴露 编辑 默认暴露 ES6 模块化引入方式 ES6 模块化语法 模块功能主要由两个命令构成:export 和 import。 ⚫ export 命令用于规定模块的对外接口(哪些数据需要暴露,就在数据前面加上关键字即可…...

Gradio学习笔记记录
安装指令:pip install gradio方法介绍 Interface》用于构建一些简单的页面,可以直接用这个指令搞定 形式》接收三个参数分别为处理函数、输入、输出三部分,呈现一般左/上为输入,右或下为输出 fn:将用户界面 ࿰…...
)
Node.js的下载与安装(支持各种新旧版本)
目录 1、node官网 2、node软件下载 3、软件安装(完整版) 1、node官网 Node.js — Download Node.jshttps://nodejs.org/en/download/package-manager 2、node软件下载 按照下图进行选择node版本(真心推荐16/18,而是尽量是LTS…...

数据库和缓存的数据一致性 -20241124
问题描述 一致性 缓存中有数据,缓存的数据值数据库中的值缓存中本没有数据,数据库中的值最新值(有请求查询数据库时,会将数据写入缓存,则变为上面的“一致”状态) “数据不一致”: 缓存的数据值…...

【计算机网络】多路转接之select
系统提供select()来实现多路转接 IO 等 拷贝 -> select()只负责等待,可以一次等待多个fd select()本身没有数据拷贝的能力,拷贝要read()/write()来完成 一、select的使用 int select(int nfds, fd_set *readfds, fd_set *writefds, fd_set *exc…...

Linux命令思维导图
看到一个很不错的Linux命令思维导图,用机器翻译了一下,建议收藏备用。 附上英文版:...
)
自然语言处理(词嵌入和词向量的使用)
一、实验目的 1.了解词嵌入和词向量的基本概念及其在自然语言处理中的应用。 2.掌握使用One-Hot编码和Word2Vec模型构建词向量的方法。 3.掌握Doc2Vec模型构建文档向量的方法以及如何计算文档向量之间的相似度。 二、实验内容 (1)使用One-Hot编码构…...

量子感知机
神经网络类似于人类大脑,是模拟生物神经网络进行信息处理的一种数学模型。它能解决分类、回归等问题,是机器学习的重要组成部分。量子神经网络是将量子理论与神经网络相结合而产生的一种新型计算模式。1995年美国路易斯安那州立大学KAK教授首次提出了量子…...

[HarmonyOS] 解决HMRouter路由地址无法抽取的问题
解决HMRouter路由地址无法抽取的问题 背景 最近开始学习HarmonyOS开发,搭建项目的时候采用了 HMRouter 路由框架,在项目里使用到路由跳转,官方链接在这: https://gitee.com/hadss/hmrouter/blob/master/HMRouterLibrary/README…...

七天掌握SQL--->第四天:事务处理与并发控制
# 7天掌握SQL - 第四天:事务处理与并发控制 ## 目标 - 学习事务处理的基本概念,如ACID特性。 - 掌握并发控制的方法,如锁机制、事务隔离级别等。 - 通过实际案例练习事务处理和并发控制。 ## 1. 事务处理的基本概念 事务处理是数据库管理系…...

Docker学习笔记整理
这周不知道写点啥内容做个分享,但还是秉持学会分享的精神,粗略放一些Docker相关的问题和解答吧,后面有机会再补补再深挖深挖o(>﹏<)o 1. 容器VS虚拟机 虚拟机是一种带环境安装的解决方案(资源完全隔离),有以下缺…...

PIMPL模式和D指针
一、PIMPL模式概念: Pimpl(pointer to implementation, 指向实现的指针)是一种用来对“类的接口与实现”进行解耦合的方法。就是将真正的实现细节的Implementor从类定义的头文件中分离出去,公有类通过一个私有指针指向隐藏的实现类…...

Linux入门系列--文件与目录
一、介绍 在Linux中,有着一句话,叫做:一切皆文件。也就是任何东西都是以文件的形式存储的。 目录结构 bin:全程binary,含义是二进制。该目录中存储的都是一些二进制文件。我们学过C/C,其实也都知道机器能…...
)
论文阅读——Intrusion detection systems using longshort‑term memory (LSTM)
一.基本信息 论文名称:Intrusion detection systems using longshort‑term memory (LSTM) 中文翻译:基于长短期记忆(LSTM)的入侵检测系统 DOI:10.1186/s40537-021-00448-4 作者:FatimaEzzahra Laghrissi1* , Samira Douzi2*, Kha…...
)
平面点排序(结构体专题)
(1) 题目描述 平面上有n个点,坐标均为整数。请按与坐标原点(0,0)距离的远近将所有点排序输出。可以自己写排序函数,也可以用qsort库函数排序。 输入描述 输入有两行,第一行是整数n(1<n<10)ÿ…...
 QT5.12.3环境 C++实现)
QT 实现仿制 网络调试器(未实现连接唯一性) QT5.12.3环境 C++实现
网络调试助手: 提前准备:在编写代码前,要在.pro工程文件中,添加network模块。 服务端: 代码: widget.h #ifndef WIDGET_H #define WIDGET_H#include <QWidget> #include <QtWidgets> #inclu…...
)
搜索引擎中广泛使用的文档排序算法——BM25(Best Matching 25)
在搜索场景中,BM25能计算每个文档与查询的匹配度,从中找出最相关的文档,并按相关性高低排序展示。 要理解BM25,需要掌握以下几个关键概念: 1. 词频(Term Frequency, TF):某关键词在文…...

文件上传需要考虑的安全性问题及解决方案
恶意文件上传:攻击者可能上传包含恶意代码的文件,如病毒、木马等,这些文件被服务器执行后,可能完全控制服务器或破坏服务器安全。为避免这种情况,应实施严格的文件验证策略,只允许特定的安全文件类型上传&a…...

论文笔记:Retrieval-Augmented Generation for Knowledge-Intensive NLP Tasks
1. 挑战/问题(Challenges/Issues): 这篇论文探讨了大型预训练语言模型在处理知识密集型自然语言处理(NLP)任务时面临的挑战。尽管这些模型在参数中存储了大量事实知识,并在微调后能够在下游NLP任务中取得很…...

Web 网络安全
一. 浏览器系统安全方面,使用多进程方案,而js主线程运行在渲染进程中,渲染进程时运行在沙箱中的,没有对本地OS文件的直接读写权限,所以需要通过IPC与浏览器主线程通信,才可以获取cookie等信息,这…...

Android Gradle 插件和 Android Studio 兼容性
Android Gradle 插件和 Android Studio 兼容性 Android Studio 版本所需的 AGP 版本Ladybug 2024.2.13.2-8.7Ladybug 2024.2.13.2-8.7Koala 2024.1.12024.2.1Jellyfish 2023.3.12024.2.1Iguana 2023.2.13.2-8.3Hedgehog 2023.1.13.2-8.2Giraffe 2022.3.13.2-8.1Flamingo 2022.…...

C++设计模式-策略模式-StrategyMethod
动机(Motivation) 在软件构建过程中,某些对象使用的算法可能多种多样,经常改变,如果将这些算法都编码到对象中,将会使对象变得异常复杂;而且有时候支持不使用的算法也是一个性能负担。 如何在运…...
——使用原型的JS工厂模式)
【H2O2|全栈】JS案例章节(四)——使用原型的JS工厂模式
目录 前言 开篇语 准备工作 需求 工厂模式 概念 优点 添加元素的新方法 分析案例 HTML代码 JS实现 结束语 前言 开篇语 本系列为短章节,单独讲述部分特殊重点案例,本期讲述使用原型来实现JS的工厂模式。 与HTML和CSS相比,JS加…...
)
.NET9 - 新功能体验(三)
书接上回,我们继续来聊聊.NET9和C#13带来的新变化。 01、Linq新方法 CountBy 和 AggregateBy 引入了新的方法 CountBy 和 AggregateBy后,可以在不经过GroupBy 分配中间分组的情况下快速完成复杂的聚合操作,同时方法命名也非常直观࿰…...

论文概览 |《Journal of Urban Technology》2024 Vol.31 Issue.2
本次给大家整理的是《Journal of Urban Technology》杂志2024年第31卷第2期的论文的题目和摘要,一共包括6篇SCI论文! 论文1 Aerial Video Surveillance in a Megacity: A Case Study in Santiago, Chile 大城市中的空中视频监控:智利圣地亚哥…...

Makefile 之 自动化变量
作用范围只在这条规则以及连带规则中,所以其值也只在作用范围内有效。而不会影响规则链以外的全局变量的值。 "$" 表示目标的集合,就像一个数组,"$"依次取出目标,并执于命令。 "$<"和"$&qu…...

【C语言】const修饰符在指针变量中的作用详解
博客主页: [小ᶻ☡꙳ᵃⁱᵍᶜ꙳] 本文专栏: C语言 文章目录 💯前言💯指针与解引用:基础概念1. 指针变量2. 解引用操作 💯const 修饰指针变量的三种主要情况1. 情况一:int * const p (指针本…...

阿里云ECS服务器监控报警配置
背景:服务器偶尔会异常,比如CPU过载,磁盘满,影响使用,人工盯服务器不现实 采用方法:阿里云监控告警功能 步骤: 第一步:登录阿里云服务器 https://account.aliyun.com/login/logi…...

高性能linux服务器运维实战小结 性能调优工具
性能指标 进程指标 进程关系 父进程创子进程时,调fork系统调用。调用时,父给子获取一个进程描述符,并设置新的pid,同事复制父进程的进程描述符给子进程,此时不会复制父进程地址空间,而是父子用相同地址空…...
)
初识Linux—— 基本指令(下)
前言: 本篇继续来学习Linux的基础指令,继续加油!!! 本篇文章对于图片即内容详解,已同步到本人gitee:Linux学习: Linux学习与知识讲解 Linux指令 1、查看文件内容的指令 cat cat 查看文件…...

【Linux】线程的互斥和同步
【Linux】线程的互斥和同步 线程间的互斥 临界资源:多线程执行共享的资源就叫做临界资源临界区:每个线程内部,访问临界资源的代码,就叫做临界区互斥:任何时刻,互斥保证有且只有一个执行流进入临界区&#…...
)
详解Oracle表的类型(二)
1.引言: Oracle数据库提供了多种表类型,以满足不同的数据存储和管理需求。本博文将对Oracle分区表及使用场景进行详细介绍。 2. 分区表 分区表是Oracle数据库中一种重要的表类型,它通过将表数据分割成多个逻辑部分来提高查询性能、管理灵活…...

VSCode 下载 安装
VSCode【下载】【安装】【汉化】【配置C环境(超快)】(Windows环境)-CSDN博客 Download Visual Studio Code - Mac, Linux, Windowshttps://code.visualstudio.com/Downloadhttps://code.visualstudio.com/Download 注意࿰…...

java中的最小堆
概述 最小堆minHeap指的级别n的每个节点存储的值小于或等于级别n1的子节点的值。因此,根就存储了其中最小的值。 注意节点的值与其他兄弟节点的值之间没有必然关系。 java中最小堆的表示 利用数组 常用的是利用数组minHeap[]表示,将最小堆的节点或值…...

ES实用面试题
一、es是什么,为什么要用它? ES通常是Elasticsearch的简称,它是一个基于Lucene构建的开源搜索引擎。Elasticsearch以其分布式、高扩展性和实时数据分析能力而闻名,广泛用于全文搜索、日志分析、实时监控等多种场景。 基本特点&am…...
线性表的链式存储)
数据结构 (7)线性表的链式存储
前言 线性表是一种基本的数据结构,用于存储线性序列的元素。线性表的存储方式主要有两种:顺序存储和链式存储。链式存储,即链表,是一种非常灵活和高效的存储方式,特别适用于需要频繁插入和删除操作的场景。 链表的基本…...

数据结构:链表进阶
链表进阶 1. ArrayList的缺陷2. 链表2.1 链表的概念及结构2.2 链表的实现 3.链表面试题4.LinkedList的使用5.1 什么是LinkedList4.2 LinkedList的使用 5. ArrayList和LinkedList的区别 1. ArrayList的缺陷 通过源码知道,ArrayList底层使用数组来存储元素࿱…...

Can UDS 学习记录
目录 Can UDS 学习记录10 03 响应否定响应22和24 的说明27服务肯定响应抑制位 Can UDS 学习记录 10 03 响应 否定响应22和24 的说明 0x22条件不正确,就是不满足服务端的运行条件0x24请求顺序错误;停止例程的请求必须在开始例程后面才可以,请…...

C 语言实现的优先级队列
C 语言实现的优先级队列 priorityqueue.h /******************************************************************************* * Copyright © 2024-2025 Light Zhang <mapawarehotmail.com>, MapAware, Inc. * * ALL RIGHTS RESERVED. …...