A Unified Framework for STAR-RIS Coefficients Optimization
文章目录
- Abstract
- B. A Penalty-based Reformulation of (1)
- III. OPTIMIZING AUXILIARY VARIABLES φ \boldsymbol φ φ IN P1
- IV. A CASE STUDY OF P2 ON DOWNLINK STAR-RIS ASSISTED TRANSMISSION SYSTEM
- A. 优化 x , ρ , w , λ t x, \rho, \mathbf{w}, \lambda^t x,ρ,w,λt 和 λ r \lambda^r λr
- **优化辅助变量 \( x \)**
- **优化辅助变量 \( \rho \)**
- **优化波束形成向量 \( \mathbf{w} \)**
- V. SIMULATION RESULTS AND DISCUSSIO
Abstract
Simultaneously transmitting and reflecting (STAR) reconfigurable intelligent surface (RIS) 近年来成为提升传统仅反射RIS性能的一项有前景的技术。考虑到比较不同STAR-RIS工作模式的无线系统的复杂性,以及由离散选择引起的性能下降,本文提出了一个统一的优化框架,用于处理来自不同STAR-RIS工作模式和离散相位系数的约束。通过巧妙引入惩罚项,该框架将原问题转化为两个迭代子问题:一个处理选择型约束(selection-type constraints),另一个处理其他无线资源。在温和的条件下,整个算法的收敛点至少是一个驻点。作为示例,本文将该框架应用于下行链路传输中的和速率最大化问题。仿真结果表明,基于该框架的算法不仅优于其他为不同STAR-RIS场景设计的现有算法,还能实现不同工作模式下的公平统一比较。此外,研究还发现,使用4个甚至2个离散相位的STAR-RIS,其和速率性能几乎与连续相位设置相同,这首次表明离散相位并不一定会导致显著的性能下降。
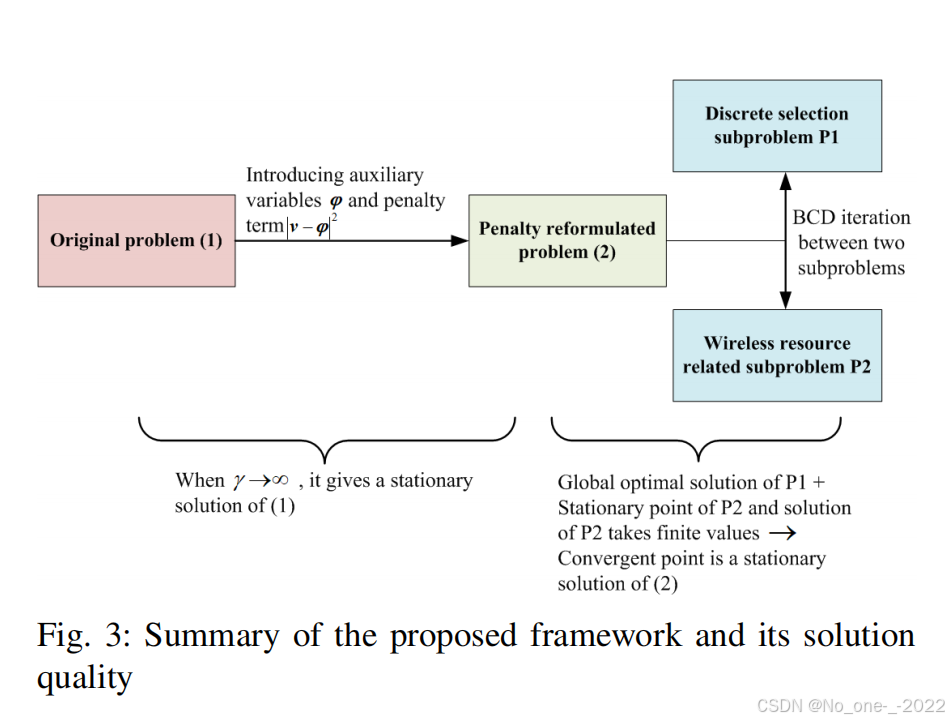
通过前述的讨论(preceding deliberations)可以看出,STAR-RIS中的不同约束条件是通过多种优化技术来处理的,这使得不同类型的STAR-RIS之间的比较变得困难。此外,当多个约束条件同时出现时,目前尚不清楚哪些现有方法可以推广到这种情形。为填补这一空白,本文首次提出了一种创新的统一框架,用于处理操作模式和离散相位约束。通过引入辅助变量来表示STAR-RIS系数,我们巧妙地将原问题转化为两个不同的子问题。一个子问题专门处理涉及离散选择的约束,另一个子问题则处理总功率约束以及额外的无线资源约束。这种战略性的解耦使得能够推导出与选择约束相关的子问题的闭式全局最优解,从而有助于证明所提出框架的解质量。具体而言,收敛的解在宽松条件下保证至少是一个驻点。据我们所知,这是首次在各种STAR-RIS配置下,即使在离散相位条件下,也提供了解质量保证的工作。

STAR-RIS有三种约束类型,即操作模式约束、无损功率约束和相位约束。以下是这些约束的详细说明。

Operating mode constraint. STAR-RIS 通常有三种操作模式 [15]:
-
ES模式(Energy Splitting mode)
在这种模式下,入射信号被分为反射信号和透射信号,对应的约束条件为:
∣ v m t ∣ , ∣ v m r ∣ ∈ [ 0 , 1 ] |v_m^t|, |v_m^r| \in [0, 1] ∣vmt∣,∣vmr∣∈[0,1] -
MS模式(Mode Switching mode)
在这种模式下,每个 STAR-RIS 单元要么专用于反射,要么专用于透射,对应的约束条件为:
∣ v m t ∣ , ∣ v m r ∣ ∈ { 0 , 1 } |v_m^t|, |v_m^r| \in \{0, 1\} ∣vmt∣,∣vmr∣∈{0,1} -
TS模式(Time Switching mode)
在这种模式下,传输时间被划分为两个子区间,其中一个子区间专用于反射,另一个专用于透射。令 λ t ≥ 0 \lambda^t \geq 0 λt≥0 和 λ r ≥ 0 \lambda^r \geq 0 λr≥0 分别表示分配给透射时段和反射时段的时间比例,则有:
λ t + λ r = 1 \lambda^t + \lambda^r = 1 λt+λr=1对于 ES 和 MS 模式,由于透射和反射均占据整个时间区间,可以设置: λ t = λ r = 1 \lambda^t = \lambda^r = 1 λt=λr=1
Lossless power constraint. 通常假设超表面是无损的。因此,在 ES模式 和 MS模式 下,反射能量与透射能量之和必须等于入射信号能量,对应的约束条件为:
∣ v m t ∣ 2 + ∣ v m r ∣ 2 = 1 |v_m^t|^2 + |v_m^r|^2 = 1 ∣vmt∣2+∣vmr∣2=1
在 TS模式 下,由于在某一时间间隔内仅进行透射或反射操作,无损约束意味着:
∣ v m t ∣ = ∣ v m r ∣ = 1 |v_m^t| = |v_m^r| = 1 ∣vmt∣=∣vmr∣=1
图2展示了 STAR-RIS 在不同操作模式下的工作情况以及对应的约束条件。
Phase constraint :
在实际应用中,STAR-RIS 的相位通常无法具有无限分辨率。在这种情况下:
∠ v m t , ∠ v m r ∈ { 0 , 2 π / L , ⋯ , 2 π ( L − 1 ) / L } \angle v_m^t, \angle v_m^r \in \{0, 2\pi/L, \cdots, 2\pi (L-1)/L\} ∠vmt,∠vmr∈{0,2π/L,⋯,2π(L−1)/L}
其中, L L L 是可用相位的数量。最近,有研究提出了一种新的 耦合相位模型(coupled-phase model) [17]-[19],该模型指出物理可实现的 STAR-RIS 必须满足以下条件:
∣ v m t ∣ ∣ v m r ∣ cos ( ∠ v m t − ∠ v m r ) = 0 |v_m^t| |v_m^r| \cos(\angle v_m^t - \angle v_m^r) = 0 ∣vmt∣∣vmr∣cos(∠vmt−∠vmr)=0
在 ES模式 下,这等价于:
∠ v m t − ∠ v m r ∈ { π / 2 ( mod 2 π ) , − π / 2 ( mod 2 π ) } \angle v_m^t - \angle v_m^r \in \{\pi/2 \ (\text{mod } 2\pi), -\pi/2 \ (\text{mod } 2\pi)\} ∠vmt−∠vmr∈{π/2 (mod 2π),−π/2 (mod 2π)}
不同类型的 STAR-RIS 是上述约束条件的混合与匹配的结果,其总结见表 I。
需要注意的是,带有耦合相位的 MS 模式实际上只是基本的 MS STAR-RIS,因为 MS 模式要求:
∣ v m t ∣ , ∣ v m r ∣ ∈ { 0 , 1 } |v_m^t|, |v_m^r| \in \{0, 1\} ∣vmt∣,∣vmr∣∈{0,1}
结合无损功率约束: ∣ v m t ∣ 2 + ∣ v m r ∣ 2 = 1 |v_m^t|^2 + |v_m^r|^2 = 1 ∣vmt∣2+∣vmr∣2=1。可以得出,必须满足以下条件之一: ∣ v m t ∣ = 0 |v_m^t| = 0 ∣vmt∣=0 或 ∣ v m r ∣ = 0 |v_m^r| = 0 ∣vmr∣=0。这使得耦合相位约束: ∣ v m t ∣ ∣ v m r ∣ cos ( ∠ v m t − ∠ v m r ) = 0 |v_m^t||v_m^r| \cos(\angle v_m^t - \angle v_m^r) = 0 ∣vmt∣∣vmr∣cos(∠vmt−∠vmr)=0 自动成立。
对于 TS 模式,由于在某一时间段内,每个 STAR-RIS 元件只使用反射相位或透射相位,因此耦合相位约束不可能存在。因此,带有耦合相位(无论是否带有离散相位约束)的 MS 和 TS STAR-RIS 是不可行的,因此表 I 中未列出这些配置。

令 z {\boldsymbol z} z 表示需要优化的其他通信资源 v t = [ v 1 t , ⋯ , v M t ] T {\boldsymbol v}^{\mathcal{t}}=\left[{v_{1}^{\mathcal{t}},\cdots,v_{M}^{\mathcal{t}}} \right]^{T} vt=[v1t,⋯,vMt]T, v r = [ v 1 r , ⋯ , v M r ] T {\boldsymbol v}^{\mathcal{r}}=\left[{v_{1}^{\mathcal{r}},\cdots,v_{M}^{\mathcal{r}}} \right]^{T} vr=[v1r,⋯,vMr]T 分别作为集合 { v m t } m = 1 M \{v_m^t\}_{m=1}^M {vmt}m=1M 和 { v m r } m = 1 M \left\{{v_{m}^{\mathcal{r}}}\right\}_{m=1}^{M} {vmr}m=1M 的简写表示,则一个涉及 STAR-RIS 的通用优化问题可以表述为:
min { z , v t , v r , λ t , λ r } F ( z , v t , v r , λ t , λ r ) s . t . λ t ∣ v m t ∣ 2 + λ r ∣ v m r ∣ 2 = 1 , { ∣ v m t ∣ = ∣ v m r ∣ = 1 , { λ t , λ r } ≥ 0 , i f T S ∣ v m t ∣ , ∣ v m r ∣ ∈ { 0 , 1 } , λ t = λ r = 1 , i f M S ∠ v m t − ∠ v m r ∈ { π / π 2 2 ( m o d 2 π ) , − π / π 2 2 ( m o d 2 π ) } , λ t = λ r = 1 , i f E S 000000 ∠ v m t , ∠ v m r ∈ { 0 , 2 π / 2 π L L , ⋯ , 2 π ( L − 1 ) / 2 π ( L − 1 ) L L } , ( z , v t , v r , λ t , λ r ) ∈ Ω . \begin{align*} & \tag{1a} \mathop{\min}\limits_{\left\{{{{\boldsymbol z}},{{\boldsymbol v}}^{{\mathcal{t}}}, {{\boldsymbol v}}^{{\mathcal{r}}},{{\lambda}^{{\mathcal{t}}}}, {{\lambda}^{{\mathcal{r}}}}}\right\}}\;\;{\rm{{\cal F}}}\left({{{\boldsymbol z}}, {{\boldsymbol v}}^{{\mathcal{t}}},{{\boldsymbol v}}^{{\mathcal{r}}},{{\lambda}^{{\mathcal{t} }}},{{\lambda}^{{\mathcal{r}}}}}\right) \\ & \tag{1b}\;\;\;\;\;\;\;\;s.t.\;\;\;{\lambda^{\mathcal{t}}}{\left|{v_{m}^{ \mathcal{t}}}\right|^{2}}+{\lambda^{\mathcal{r}}}{\left|{v_{m}^{\mathcal{r}}} \right|^{2}}=1, \\ &\qquad \left\{ \begin{array}{l} \left|{v_{m}^{\mathcal{t}}}\right|=\left|{v_{m}^{\mathcal{r}}} \right|=1,\left\{{{{\lambda}^{{\mathcal{t}}}},{{\lambda}^{{\mathcal{r} }}}}\right\}\geq 0,\qquad {\rm if\;TS} \\[3pt] \left|{v_{m}^{\mathcal{t}}}\right|,\left|{v_{m}^{\mathcal{r}}} \right|\in\left\{{0,1}\right\},{{\lambda}^{{\mathcal{t}}}}={{ \lambda}^{{\mathcal{r}}}}=1,\quad {\rm if\;MS} \\[3pt] \begin{array}{l}\angle v_{m}^{\mathcal{t}}-\angle v_{m}^{\mathcal{r}}\in \left\{{{\pi\mathord{\left/{\vphantom{\pi 2}}\right.\kern-1.2pt}2} \left({\bmod 2\pi}\right),}\right. \\ \left.-{\pi\mathord{\left/{\vphantom{\pi 2}}\right.\kern-1.2pt}2}\left({\bmod 2 \pi}\right)\right\},{\lambda^{\mathcal{t}}}={\lambda^{\mathcal{r}}}=1, \end{array} \quad {\rm if\;ES} \end{array}\right. \phantom{000000} \tag{1c}\\ &\qquad \angle v_{m}^{\mathcal{t}},\angle v _{m}^{\mathcal{r}}\in\left\{{0,{{2\pi}\mathord{\left/{\vphantom{{2\pi} L}}\right.\kern-1.2pt}L},\cdots,{{2\pi\left({L-1}\right)}\mathord{\left/{ \vphantom{{2\pi\left({L-1}\right)}L}}\right.\kern-1.2pt}L}}\right\}, \tag{1d}\\ &\qquad \left({{\boldsymbol z},{{{\boldsymbol v}}^{\mathcal{t}}},{{{\boldsymbol v}}^{\mathcal{r}}},{{\lambda}^{\mathcal{t}}},{{\lambda}^{\mathcal{r}}} }\right)\in{\boldsymbol{\Omega}}. \tag{1e} \end{align*} {z,vt,vr,λt,λr}minF(z,vt,vr,λt,λr)s.t.λt vmt 2+λr∣vmr∣2=1,⎩ ⎨ ⎧∣vmt∣=∣vmr∣=1,{λt,λr}≥0,ifTS∣vmt∣,∣vmr∣∈{0,1},λt=λr=1,ifMS∠vmt−∠vmr∈{π/π22(mod2π),−π/π22(mod2π)},λt=λr=1,ifES000000∠vmt,∠vmr∈{0,2π/2πLL,⋯,2π(L−1)/2π(L−1)LL},(z,vt,vr,λt,λr)∈Ω.(1a)(1b)(1c)(1d)(1e)
在该优化问题中, F \mathcal F F 是目标函数,并假设其有下界(这是一个显而易见的假设,因为问题是一个最小化问题)。公式 (1) 中的目标函数可以表示系统性能的不同形式,例如:功耗 [15], [19]、均方误差函数 [26] 。
另一方面,以下性能指标也常被用作优化目标,但由于这些指标需要最大化而非最小化,使用它们时需要在公式 (1) 中添加负号:总速率(Sum-rate)[14], [20] 、频谱效率(Spectral efficiency)[29]、保密容量(Secrecy capacity)[30], [34]
其中, Ω \boldsymbol{{\Omega}} Ω 是 z z z、 v t {\boldsymbol v}^{\mathcal{t}} vt、 v r {\boldsymbol v}^{\mathcal{r}} vr、 λ t \lambda^t λt、 λ r \lambda^r λr 的耦合约束集合。约束条件 (1b) 是涵盖所有三种 STAR-RIS 模式的通用表达形式,具体如下:
B. A Penalty-based Reformulation of (1)
注意到问题 (1) 中,由于约束 (1c) 包含二元选择,因此求解 STARRIS 系数 v t \boldsymbol v_t vt 和 v r \boldsymbol v_r vr 具有一定的挑战性。更具体地说,(1c) 中的第二个约束和第三个约束分别对振幅和两个相位之差进行了二元选择。此外,(1d) 中可能出现的离散相位也使得问题 (1) 成为一个混合整数优化问题(mixed integer optimization problem)。
为了解决这个问题,我们提出采用辅助向量 φ t , φ r ∈ C M × 1 \boldsymbol \varphi_t, \boldsymbol \varphi_r \in \mathbb{C}^{M \times 1} φt,φr∈CM×1,并结合一个惩罚项来处理约束 (1c) 和 (1d)。重新表述后的问题可以写成如下形式:
min { z , v t , v r , φ t , φ r , λ t , λ r } F ( z , v t , v r , λ t , λ r ) + γ 2 ∑ p = t , r ∣ v p − φ p ∣ 2 2 s . t . { ∣ φ m t ∣ = ∣ φ m r ∣ = 1 , { λ t , λ r } ≥ 0 , i f T S ∣ φ m t ∣ , ∣ φ m r ∣ ∈ { 0 , 1 } , λ t = λ r = 1 , i f M S ∠ φ m t − ∠ φ m r ∈ { π / π 2 2 ( m o d 2 π ) , − π / π 2 2 ( m o d 2 π ) } , λ t = λ r = 1 , i f E S ∠ φ m t , ∠ φ m r ∈ { 0 , 2 π / 2 π L L , ⋯ , 2 π ( L − 1 ) / 2 π ( L − 1 ) L L } , ( 1b ) , ( 1e ) \begin{align*} &\mathop{\min}\limits_{\left\{{\scriptstyle{ \boldsymbol{z}},{{\boldsymbol{v}}^{{\mathcal{t}}}},{{\boldsymbol{v}}^{{ \mathcal{r}}}},{\boldsymbol{\varphi}}^{{\mathcal{t}}},\atop\scriptstyle{ {\boldsymbol{\varphi}}^{{\mathcal{r}}}},{\lambda}^{{\mathcal{t}}},{\lambda^{{ \mathcal{r}}}}} \right\}}{{\rm{{\cal F}}}}\left({{\boldsymbol{z}},{{ \boldsymbol{v}}^{\mathcal{t}}},{{\boldsymbol{v}}^{\mathcal{r}}},{{\lambda}^{ \mathcal{t}}},{{\lambda}^{\mathcal{r}}}}\right)+\frac{\gamma}{2}\sum\limits_{{ \mathcal{p}}={\mathcal{t}},{\mathcal{r}}}{\left|{{{\boldsymbol{v}}^{\mathcal{p }}} {-} {{\boldsymbol{\varphi}}^{\mathcal{p}}}}\right|_{2}^{2}}\tag{2a} \\ &\;\;\;\;\;\;\;\;s.t.\;\;\;\left\{\begin{array}{l}\left|{\varphi_{m}^{\mathcal{t}}}\right|=\left|{\varphi _{m}^{\mathcal{r}}}\right|=1,\left\{{{{\lambda}^{{\mathcal{t}}}},{{\lambda}^{{ \mathcal{r}}}}}\right\}\geq 0,\quad\;\;\;{\rm if\;TS}\\ \left|{\varphi_{m}^{\mathcal{t}}}\right|,\left|{\varphi_{m}^{ \mathcal{r}}}\right|\in\left\{{0,1}\right\},{{\lambda}^{{\mathcal{t}}}}={{ \lambda}^{{\mathcal{r}}}}=1,\;\;{\rm if\;MS}\\ \begin{array}{l}\angle\varphi_{m}^{\mathcal{t}}-\angle\varphi_{m }^{\mathcal{r}}\in\left\{{{\pi\mathord{\left/{\vphantom{\pi 2}}\right.}2}\left({\bmod 2\pi}\right),}\right.\\ \left.{-{\pi\mathord{\left/{\vphantom{\pi 2}}\right.}2}\left({\bmod 2 \pi}\right)}\right\},{\lambda^{\mathcal{t}}}={\lambda^{\mathcal{r}}}=1,\end{array}\;{\rm if\;ES}\end{array}\right.\tag{2b} \\ &\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\angle\varphi _{m}^{\mathcal{t}},\angle\varphi_{m}^{\mathcal{r}}\in\left\{{0,{{2\pi}\mathord {\left/{\vphantom{{2\pi}L}}\right.}L},\cdots,{{2\pi\left({L-1} \right)}\mathord{\left/{\vphantom{{2\pi\left({L-1}\right)}L}}\right.}L}}\right\}, (\text{1b}), (\text{1e})\tag{2c} \end{align*} {φr,λt,λrz,vt,vr,φt,}minF(z,vt,vr,λt,λr)+2γp=t,r∑∣vp−φp∣22s.t.⎩ ⎨ ⎧∣φmt∣=∣φmr∣=1,{λt,λr}≥0,ifTS∣φmt∣,∣φmr∣∈{0,1},λt=λr=1,ifMS∠φmt−∠φmr∈{π/π22(mod2π),−π/π22(mod2π)},λt=λr=1,ifES∠φmt,∠φmr∈{0,2π/2πLL,⋯,2π(L−1)/2π(L−1)LL},(1b),(1e)(2a)(2b)(2c)
其中, γ \gamma γ 是惩罚系数。当惩罚系数增大时,RIS 系数向量 v t \boldsymbol v_t vt 和 v r \boldsymbol v_r vr 将被迫取与辅助向量 φ t , φ r \boldsymbol \varphi_t, \boldsymbol \varphi_r φt,φr 相同的值,从而使 v t \boldsymbol v_t vt 和 v r \boldsymbol v_r vr 满足约束 (1c) 和 (1d)。
注意到 (2) 中 { φ t , φ r } \{\boldsymbol{\varphi}_t, \boldsymbol{\varphi}_r\} {φt,φr} 和 { z , v t , v r , λ t , λ r } \{\boldsymbol{z}, \boldsymbol{v}_t, \boldsymbol{v}_r, {\lambda}_t, {\lambda}_r\} {z,vt,vr,λt,λr} 的约束并未耦合,因此可以采用 BCD 框架来处理该问题,该框架涉及交替求解以下两个子问题:
P 1 : min { φ t , φ r } ∣ v t − φ t ∣ 2 2 + ∣ v r − φ r ∣ 2 2 s . t . { ∣ φ m t ∣ = ∣ φ m r ∣ = 1 , i f T S ∣ φ m t ∣ , ∣ φ m r ∣ ∈ { 0 , 1 } , i f M S ∠ φ m t − ∠ φ m r ∈ { π / π 2 2 ( m o d 2 π ) , − π / π 2 2 ( m o d 2 π ) } , i f E S ∠ φ m t , ∠ φ m r ∈ { 0 , 2 π / 2 π L L , ⋯ , 2 π ( L − 1 ) / 2 π ( L − 1 ) L L } . \begin{align*} \begin{split}\displaystyle{\rm P1}:\mathop{\min}\limits_{\left\{{{{\boldsymbol\varphi} ^{\mathcal{t}}},{{\boldsymbol\varphi}^{\mathcal{r}}}}\right\}}&\displaystyle{\left|{{{ \boldsymbol v}^{\mathcal{t}}} {-} {{\boldsymbol\varphi}^{\mathcal{t}}}}\right|_{2}^{2}{+} \left|{{{\boldsymbol v}^{\mathcal{r}}} {-} {{\boldsymbol\varphi}^{\mathcal{r}}}}\right|_{2}^ {2}}\\ \displaystyle s.t.&\displaystyle\left\{\begin{array}{l}\left|{\varphi_{m}^{\mathcal{t}}}\right|=\left|{\varphi_{m}^{\mathcal{r}} }\right|=1,\qquad\qquad\qquad\;\;\;\;\;{\rm if\;TS}\\ \left|{\varphi_{m}^{\mathcal{t}}}\right|,\left|{\varphi_{m}^{ \mathcal{r}}}\right|\in\left\{{0,1}\right\},\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\; \;\;\;\;\;{\rm if\;MS}\\ \begin{array}{l}\angle\varphi_{m}^{\mathcal{t}}-\angle\varphi_{m}^{\mathcal{ r}}\in\left\{{{\pi\mathord{\left/{\vphantom{\pi 2}}\right.\kern-1.2pt}2}\left ({\bmod 2\pi}\right),}\right.\\ \left.{-{\pi\mathord{\left/{\vphantom{\pi 2}}\right.\kern-1.2pt}2}\left({\bmod 2 \pi}\right)}\right\},\end{array}\;\;{\rm if\;ES}\end{array}\right.\\ &\displaystyle\;\angle\varphi_{m}^{\mathcal{t}},\angle\varphi_{m}^{\mathcal{r} }\in\left\{{0,{{2\pi}\mathord{\left/{\vphantom{{2\pi}L}}\right.\kern-1.2pt}L}, \cdots,{{2\pi\left({L-1}\right)}\mathord{\left/{\vphantom{{2\pi\left({L-1} \right)}L}}\right.\kern-1.2pt}L}}\right\}.\end{split} \end{align*} P1:{φt,φr}mins.t. vt−φt 22+∣vr−φr∣22⎩ ⎨ ⎧∣φmt∣=∣φmr∣=1,ifTS∣φmt∣,∣φmr∣∈{0,1},ifMS∠φmt−∠φmr∈{π/π22(mod2π),−π/π22(mod2π)},ifES∠φmt,∠φmr∈{0,2π/2πLL,⋯,2π(L−1)/2π(L−1)LL}.
P 2 : min { z , v t , v r , λ t , λ r } F ( z , v t , v r , λ t , λ r ) + γ 2 ∑ p = t , r ∣ v p − φ p ∣ 2 2 s . t . { λ t + λ r = 1 , { λ t , λ r } ≥ 0 , i f T S ∣ v m t ∣ 2 + ∣ v m r ∣ 2 = 1 , λ t = λ r = 1 , i f M S / E S ( z , v t , v r , λ t , λ r ) ∈ Ω \begin{align*} \begin{split}\displaystyle{\rm P2}:\mathop{\min}\limits_{\left\{{\scriptstyle{ \boldsymbol z},{{\boldsymbol v}^{{\mathcal{t}}}},{{\boldsymbol v}^{{\mathcal{r}}}},{{\lambda}^{{\mathcal{t}}}},{\lambda^{{\mathcal{r}}}}} \right\}}&\displaystyle{\cal F}\left({{\boldsymbol z},{{\boldsymbol v}^{\mathcal{t}}},{{\boldsymbol v} ^{\mathcal{r}}},{\lambda^{\mathcal{t}}},{\lambda^{\mathcal{r}}}}\right){+} \frac{\gamma}{2}\sum\limits_{{\mathcal{p}}={\mathcal{t}},{\mathcal{r}}}{\left| {{{\boldsymbol v}^{\mathcal{p}}}{-}{{\boldsymbol\varphi}^{\mathcal{p}}}}\right|_{2}^{2}}\\ \displaystyle s.t.&\displaystyle\left\{\begin{array}{l}{\lambda^{\mathcal{t}}}+{\lambda^{\mathcal{r}}}=1,\left\{{{\lambda^{ \mathcal{t}}},{\lambda^{\mathcal{r}}}}\right\}\geq 0,\;\;\;{\rm if\;TS}\\ \begin{array}{l}{\left|{v_{m}^{\mathcal{t}}}\right|^{2}}+{ \left|{v_{m}^{\mathcal{r}}}\right|^{2}}=1,\\ {\lambda^{\mathcal{t}}}={\lambda^{\mathcal{r}}}=1,\end{array} \quad\;\;\;\;\;{\rm if\;MS/ES}\end{array}\right.\\ &\displaystyle\left({{\boldsymbol z},{{\boldsymbol v}^{\mathcal{t}}},{{\boldsymbol v}^{\mathcal{r}}},{ \lambda^{\mathcal{t}}},{\lambda^{\mathcal{r}}}}\right)\in{\boldsymbol\Omega}\end{split} \end{align*} P2:{z,vt,vr,λt,λr}mins.t.F(z,vt,vr,λt,λr)+2γp=t,r∑∣vp−φp∣22⎩ ⎨ ⎧λt+λr=1,{λt,λr}≥0,ifTS∣vmt∣2+∣vmr∣2=1,λt=λr=1,ifMS/ES(z,vt,vr,λt,λr)∈Ω
III. OPTIMIZING AUXILIARY VARIABLES φ \boldsymbol φ φ IN P1
如表 I 所示,公式 (3) 的约束条件的不同组合导致了不同类型的 STAR-RIS。以下将讨论分为两种情况。首先,我们考虑没有耦合相位约束的情况,这对应于表 I 中的第 1 至第 6 种情况。然后,我们讨论表 I 中的第 7 和第 8 种具有耦合相位的情况。
无耦合相位的 STAR-RIS: 由此产生的子问题为:
min φ m t , φ m r ∣ v m t − φ m t ∣ 2 + ∣ v m r − φ m r ∣ 2 s . t . { ∣ φ m t ∣ = ∣ φ m r ∣ = 1 , i f T S ∣ φ m t ∣ , ∣ φ m r ∣ = { 0 , 1 } o r { 1 , 0 } , i f M S φ m t , φ m r ∈ C , i f E S ∠ φ m t , ∠ φ m r ∈ { 0 , 2 π / 2 π L L , ⋯ , 2 π ( L − 1 ) / 2 π ( L − 1 ) L L } . \begin{align*} \mathop{\min}\limits_{\varphi_{m}^{\mathcal{t}},\varphi_{m}^{ \mathcal{r}}} & \left|{v_{m}^{\mathcal{t}}-\varphi_{m}^{\mathcal{t}}}\right|^{2}+ \left|{v_{m}^{\mathcal{r}}-\varphi_{m}^{\mathcal{r}}}\right|^{2} \tag{4a}\\ s.t. & \left\{\begin{array}{l}\left|{\varphi_{m}^{ \mathcal{t}}}\right|=\left|{\varphi_{m}^{\mathcal{r}}}\right|=1,\;\;\;\;\;\; \;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;{\rm if\;TS}\\[3pt] \left|{\varphi_{m}^{\mathcal{t}}}\right|,\left|{\varphi_{m}^{ \mathcal{r}}}\right|=\left\{{0,1}\right\}{\rm\;or\;}\left\{{1,0}\right\},\;\;\;\;\;{\rm if\;MS}\\[3pt] \varphi_{m}^{\mathcal{t}},\varphi_{m}^{\mathcal{r}}\in{\mathbb{C}},\;\;\;\;\; \;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;{\rm if\;ES} \end{array}\right. \tag{4b}\\ & \; \angle\varphi_{m}^{\mathcal{t}},\angle\varphi_{m}^{\mathcal{r}} \in\left\{{0,{{2\pi}\mathord{\left/{\vphantom{{2\pi}L}}\right.\kern-1.2pt}L},\cdots,{{2\pi\left({L-1}\right)}\mathord{\left/{\vphantom{{2\pi\left({L -1}\right)}L}}\right.\kern-1.2pt}L}}\right\}. \tag{4c} \end{align*} φmt,φmrmins.t. vmt−φmt 2+∣vmr−φmr∣2⎩ ⎨ ⎧∣φmt∣=∣φmr∣=1,ifTS∣φmt∣,∣φmr∣={0,1}or{1,0},ifMSφmt,φmr∈C,ifES∠φmt,∠φmr∈{0,2π/2πLL,⋯,2π(L−1)/2π(L−1)LL}.(4a)(4b)(4c)
一般来说,这是一个包含整数变量的问题,因为相位是离散的,因此难以求解。然而,由于公式 (4) 中的幅度约束和相位约束是分离的,我们可以分别对其求解,并通过以下引理获得公式 (4) 的闭式解。
引理 1. 定义 α m t = Proj Θ ( ∠ v m t ) \alpha_m^t = \text{Proj}_\Theta (\angle v_m^t) αmt=ProjΘ(∠vmt), α m r = Proj Θ ( ∠ v m r ) \alpha_m^r = \text{Proj}_\Theta (\angle v_m^r) αmr=ProjΘ(∠vmr), β m t = ∣ v m t ∣ cos ( α m t − ∠ v m t ) \beta_m^t = |v_m^t| \cos (\alpha_m^t - \angle v_m^t) βmt=∣vmt∣cos(αmt−∠vmt), β m r = ∣ v m r ∣ cos ( α m r − ∠ v m r ) \beta_m^r = |v_m^r| \cos (\alpha_m^r - \angle v_m^r) βmr=∣vmr∣cos(αmr−∠vmr)。公式 (4) 的最优解为:
φ m t = e j α m t , φ m r = e j α m r , i f T S φ m t = 1 + s g n ( β m t − β m r ) 2 e j α m t , φ m r = 1 + s g n ( β m r − β m t ) 2 e j α m r , i f M S φ m t = β m t e j α m t , φ m r = β m r e j α m r , i f E S \begin{align*} \begin{array}{l}\varphi_{m}^{\mathcal{t}}={e^{j\alpha_{m}^{ \mathcal{t}}}},\varphi_{m}^{\mathcal{r}}={e^{j\alpha_{m}^{\mathcal{r}}}},\;\; \;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\; {\rm if\;TS}\\[3pt] \varphi_{m}^{\mathcal{t}}=\frac{{1+{\mathop{\rm sgn}}\left({\beta_ {m}^{\mathcal{t}} -\beta_{m}^{\mathcal{r}}}\right)}}{2}{e^{j\alpha_{m}^{ \mathcal{t}}}},\varphi_{m}^{\mathcal{r}}=\frac{{1+{\mathop{\rm sgn}}\left({ \beta_{m}^{\mathcal{r}} -\beta_{m}^{\mathcal{t}}}\right)}}{2}{e^{j\alpha_{m}^{ \mathcal{r}}}}, {\rm if\;MS}\\[3pt] \varphi_{m}^{\mathcal{t}}=\beta_{m}^{\mathcal{t}}{e^{j\alpha_{m}^{\mathcal{t}} }},\varphi_{m}^{\mathcal{r}}=\beta_{m}^{\mathcal{r}}{e^{j\alpha_{m}^{\mathcal{ r}}}},\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\; {\rm if \;ES} \end{array}\tag{5} \end{align*} φmt=ejαmt,φmr=ejαmr,ifTSφmt=21+sgn(βmt−βmr)ejαmt,φmr=21+sgn(βmr−βmt)ejαmr,ifMSφmt=βmtejαmt,φmr=βmrejαmr,ifES(5)
引理 2. If L > 2 and is an even number, the optimal solution of (6) is
φ m t = ∣ v m t ∣ cos ( θ m t − ∠ v m t ) e j θ m t , φ m r = ∣ v m r ∣ ∣ sin ( θ m t − ∠ v m r ) ∣ e j ( θ m t − π 2 s g n ( sin ( θ m t − ∠ v m r ) ) ) , \begin{align*} \begin{array}{l}\varphi_{m}^{\mathcal{t}}=\left|{v_{m}^{\mathcal{t}}}\right| \cos\left({\theta_{m}^{\mathcal{t}}-\angle v_{m}^{\mathcal{t}}}\right){e^{j \theta_{m}^{\mathcal{t}}}},\\ \varphi_{m}^{\mathcal{r}}=\left|{v_{m}^{\mathcal{r}}}\right|\left|{\sin\left({ \theta_{m}^{\mathcal{t}}-\angle v_{m}^{\mathcal{r}}}\right)}\right|{e^{j\left ({\theta_{m}^{\mathcal{t}}-\frac{\pi}{2}{\mathop{\rm sgn}}\left({\sin\left({ \theta_{m}^{\mathcal{t}}-\angle v_{m}^{\mathcal{r}}}\right)}\right)}\right)}}, \end{array}\tag{7} \end{align*} φmt=∣vmt∣cos(θmt−∠vmt)ejθmt,φmr=∣vmr∣∣sin(θmt−∠vmr)∣ej(θmt−2πsgn(sin(θmt−∠vmr))),(7)
其中 θ m t = P r o j Θ ( ∠ v m t − b m / − b m 2 2 + π / π 2 2 ) \theta_{m}^{{\mathcal{t}}}={\rm Proj}_{\boldsymbol{\Theta}}\left({\angle v_{m} ^{\mathcal{t}}{-{b_{m}}\mathord{\left/{\vphantom{{-{b_{m}}}2}}\right.\kern-1.2 pt}2}+{\pi\mathord{\left/{\vphantom{\pi 2}}\right.\kern-1.2pt}2}}\right) θmt=ProjΘ(∠vmt−bm/−bm22+π/π22), b m = − j ln ( [ ∣ v m r ∣ 2 cos ( 2 ∠ v m t − 2 ∠ v m r ) + ∣ v m t ∣ 2 ] + j ∣ v m r ∣ 2 sin ( 2 ∠ v m t − 2 ∠ v m r ) [ ∣ v m r ∣ 2 cos ( 2 ∠ v m t − 2 ∠ v m r ) + ∣ v m t ∣ 2 ] 2 + [ ∣ v m r ∣ 2 sin ( 2 ∠ v m t − 2 ∠ v m r ) ] 2 ) {b_{m}}=-j\ln\left({{\frac{{\left[{{\left|{v_{m}^{\mathcal{r}}}\right|}^{2}}\cos\left({2 \angle v_{m}^{\mathcal{t}}-2\angle v_{m}^{\mathcal{r}}}\right)+\left|{v_{m}^{ \mathcal{t}}}\right|^{2}\right]+j{{\left|{v_{m}^{\mathcal{r}}}\right|}^{2}} \sin\left({2\angle v_{m}^{\mathcal{t}}-2\angle v_{m}^{\mathcal{r}}}\right)}}{{ \sqrt{{{\left[{{{\left|{v_{m}^{\mathcal{r}}}\right|}^{2}}\cos\left({2\angle v_ {m}^{\mathcal{t}}-2\angle v_{m}^{\mathcal{r}}}\right)+{{\left|{v_{m}^{\mathcal {t}}}\right|}^{2}}}\right]}^{2}}+{{\left[{{{\left|{v_{m}^{\mathcal{r}}}\right| }^{2}}\sin\left({2\angle v_{m}^{\mathcal{t}}-2\angle v_{m}^{\mathcal{r}}} \right)}\right]}^{2}}}}}}}\right) bm=−jln([∣vmr∣2cos(2∠vmt−2∠vmr)+∣vmt∣2]2+[∣vmr∣2sin(2∠vmt−2∠vmr)]2[∣vmr∣2cos(2∠vmt−2∠vmr)+∣vmt∣2]+j∣vmr∣2sin(2∠vmt−2∠vmr))。
Proof. See Appendix C in supplementary material.
这里我必须要吐槽一下作者,这里看似 b m {b_{m}} bm 的结果没有问题,实际上根本是无法仿真的, ln \ln ln 函数中有虚数在MATLAB中是无法运行的。同时我下载了所谓 supplementary material,我们发现Appendix C中对于 χ m \chi_{m} χm 的推导是错误的,正确的结果应该是 χ m = [ ∣ v m t ∣ 2 cos ( 2 ∠ v m t − 2 ∠ v m t ) − ∣ v m t ∣ 2 ] 2 + [ ∣ v m r ∣ 2 sin ( 2 ∠ v m t − 2 ∠ v m r ) ] 2 \chi_m=\left[\left|v_m^t\right|^2\cos\left(2\angle v_m^t-2\angle v_m^t\right)-\left|v_m^t\right|^2\right]^2+\left[\left|v_m^r\right|^2\sin\left(2\angle v_m^t-2\angle v_m^r\right)\right]^2 χm=[∣vmt∣2cos(2∠vmt−2∠vmt)−∣vmt∣2]2+[∣vmr∣2sin(2∠vmt−2∠vmr)]2。此外,此处相角的导出也非常反人类的直觉,他是根据 e j b m = cos b m + j sin b m e^{jb_m}=\cos b_m+j\sin b_m ejbm=cosbm+jsinbm,得到 b m = − j ln ( cos b m + j sin b m ) b_{m}=-j\ln(\cos b_m+j\sin b_m) bm=−jln(cosbm+jsinbm),只能说bro 一定觉得自己很幽默。
引理 1 和引理 2 涵盖了离散和连续相位的 STAR-RIS。对于后者情况,相当于取 L → ∞ L \to \infty L→∞,并且引理 1 和引理 2 中的投影函数可以省略。需要注意的是,对于最简单的 ES STAR-RIS(表 I 中的第五种情况),由于公式 (3) 中没有涉及相位和幅度的约束,辅助变量 φ t \varphi^t φt 和 φ r \varphi^r φr 的最优解将始终等于 v t v^t vt 和 v r v^r vr。因此,惩罚循环只需执行一次,这就简化为许多现有文献中的传统无惩罚设计 [28], [44]。
由于 P1 的解覆盖了所有现有类型的 STAR-RIS,一旦解决了 P2,就可以轻松比较所有 STAR-RIS 类型的系统性能。这是第一次以统一的方式启用这样的比较。这一点很重要,因为如果我们分别在不同的 STAR-RIS 模式下优化资源分配问题 (1),性能的差异可能不仅来自操作模式的不同,还来自算法的不同。因此,所提出的框架为通信系统研究人员提供了一种统一的方法,以决定哪种类型的 STAR-RIS 最适合特定场景或应用。此类比较的示例将在第 V 节中提供。
IV. A CASE STUDY OF P2 ON DOWNLINK STAR-RIS ASSISTED TRANSMISSION SYSTEM
所提出的框架在第II节中基于将原始问题合理地分解为两个子问题:P1用于解决由STAR-RIS引起的离散约束问题;P2用于优化其他无线资源。通过在第III节中为各种类型的STAR-RIS推导P1的闭合解,研究人员只需关注解决P2问题,这是无线通信资源分配中的常见情况。本节提供了一个关于下行STAR-RIS辅助通信系统的示例。
假设基站(BS)有 N N N根天线,STAR-RIS包含 M M M个元件。此外,反射区域和透射区域分别有 K r K^r Kr个用户和 K t K^t Kt个用户,这些用户均为单天线用户。在本文中,我们假设基站可获得信道状态信息(CSI)。设 s i ∈ C s_i \in \mathbb{C} si∈C为归一化功率的符号,表示针对第 i i i个用户的信息符号( i = 1 , ⋯ , K r + K t i = 1, \cdots, K^r + K^t i=1,⋯,Kr+Kt)。基站通过波束成形向量 w i ∈ C N × 1 \mathbf{w}_i \in \mathbb{C}^{N \times 1} wi∈CN×1发送的信号为 ∑ i = 1 K r + K t w i s i \sum_{i=1}^{K^r + K^t} \mathbf{w}_i s_i ∑i=1Kr+Ktwisi。定义反射用户集和透射用户集分别为 K r = { 1 , ⋯ , K r } \mathcal{K}^r = \{1, \cdots, K^r\} Kr={1,⋯,Kr}和 K t = { K r + 1 , ⋯ , K r + K t } \mathcal{K}^t = \{K^r + 1, \cdots, K^r + K^t\} Kt={Kr+1,⋯,Kr+Kt},则第 l l l个用户接收到的信号为:
y l = { ∑ i = 1 K r + K t ( h l T diag ( v r ) G + d l T ) w i s i + n l , l ∈ K r ∑ i = 1 K r + K t ( h l T diag ( v t ) G + d l T ) w i s i + n l , l ∈ K t y_l = \begin{cases} \sum_{i=1}^{K^r + K^t} \left( \mathbf{h}_l^T \text{diag}(\mathbf{v}^r) \mathbf{G} + \mathbf{d}_l^T \right) \mathbf{w}_i s_i + n_l, & l \in \mathcal{K}^r \\ \sum_{i=1}^{K^r + K^t} \left( \mathbf{h}_l^T \text{diag}(\mathbf{v}^t) \mathbf{G} + \mathbf{d}_l^T \right) \mathbf{w}_i s_i + n_l, & l \in \mathcal{K}^t \end{cases} yl={∑i=1Kr+Kt(hlTdiag(vr)G+dlT)wisi+nl,∑i=1Kr+Kt(hlTdiag(vt)G+dlT)wisi+nl,l∈Krl∈Kt
其中 G ∈ C M × N \mathbf{G} \in \mathbb{C}^{M \times N} G∈CM×N和 h l ∈ C M × 1 \mathbf{h}_l \in \mathbb{C}^{M \times 1} hl∈CM×1分别是基站到STAR-RIS的信道和STAR-RIS到第 l l l个用户的信道。 d l ∈ C N × 1 \mathbf{d}_l \in \mathbb{C}^{N \times 1} dl∈CN×1是基站到第 l l l个用户的直达链路信道,而 n l ∈ C n_l \in \mathbb{C} nl∈C是均值为零、方差为 σ l 2 \sigma_l^2 σl2的高斯噪声。
在本节中,我们考虑下行链路的和速率最大化问题。由于不同用户的信息符号与噪声之间互不相关,整个系统的和速率为[23]:
R ( w , v t , v r , λ t , λ r ) = λ r ∑ l = 1 K r log ( 1 + ∣ a l T w l ∣ 2 / ∣ a l T w l ∣ 2 λ r λ r ∑ i = 1 , ≠ l K r + K t ∣ a l T w i ∣ 2 / ∑ i = 1 , ≠ l K r + K t ∣ a l T w i ∣ 2 λ r λ r + σ l 2 ) + λ t ∑ l = K r + 1 K r + K t log ( 1 + ∣ a l T w l ∣ 2 / ∣ a l T w l ∣ 2 λ t λ t ∑ i = 1 , ≠ l K r + K t ∣ a l T w i ∣ 2 / ∑ i = 1 , ≠ l K r + K t ∣ a l T w i ∣ 2 λ t λ t + σ l 2 ) , \begin{align*} &{\mathcal R}\left({{\boldsymbol{w}},{{\boldsymbol{v}}^{\mathcal{t}}}, {{\boldsymbol{v}}^{\mathcal{r}}},{\lambda^{\mathcal{t}}},{\lambda^{\mathcal{r} }}}\right) \\ &\quad ={\lambda^{\mathcal{r}}}\sum\limits_{l=1}^{{K^{\mathcal{r}}}}{ \log\left({1+\frac{{{{{{\left|{{\boldsymbol{a}}_{l}^{T}{{\boldsymbol{w}}_{l}}} \right|}^{2}}}\mathord{\left/{\vphantom{{{{\left|{{\boldsymbol{a}}_{l}^{T}{{ \boldsymbol{w}}_{l}}}\right|}^{2}}}{{\lambda^{\mathcal{r}}}}}}\right.}{{\lambda^{\mathcal{r}}}}}}}{{{{\sum\nolimits_{i=1,\neq l}^{{K^{\mathcal{r} }}+{K^{\mathcal{t}}}}{{{\left|{{\boldsymbol{a}}_{l}^{T}{{\boldsymbol{w}}_{i}}} \right|}^{2}}}}\mathord{\left/{\vphantom{{\sum\nolimits_{i=1,\neq l}^{{K^{ \mathcal{r}}}+{K^{\mathcal{t}}}}{{{\left|{{\boldsymbol{a}}_{l}^{T}{{ \boldsymbol{w}}_{i}}}\right|}^{2}}}}{{\lambda^{\mathcal{r}}}}}}\right.}{{\lambda^{\mathcal{r}}}}}+\sigma_{l}^{2}}}}\right)} \\ &\quad +{\lambda^{\mathcal{t}}}\sum\limits_{l={K^{\mathcal{r}}}+ 1}^{{K^{\mathcal{r}}}+{K^{\mathcal{t}}}}{\log\left({1+\frac{{{{{{\left|{{ \boldsymbol{a}}_{l}^{T}{{\boldsymbol{w}}_{l}}}\right|}^{2}}}\mathord{\left/{ \vphantom{{{{\left|{{\boldsymbol{a}}_{l}^{T}{{\boldsymbol{w}}_{l}}}\right|}^{2 }}}{{\lambda^{\mathcal{t}}}}}}\right.}{{\lambda^{\mathcal{t}}}}}}}{ {{{\sum\nolimits_{i=1,\neq l}^{{K^{\mathcal{r}}}+{K^{\mathcal{t}}}}{{{\left|{{ \boldsymbol{a}}_{l}^{T}{{\boldsymbol{w}}_{i}}}\right|}^{2}}}}\mathord{\left/{ \vphantom{{\sum\nolimits_{i=1,\neq l}^{{K^{\mathcal{r}}}+{K^{\mathcal{t}}}}{{{ \left|{{\boldsymbol{a}}_{l}^{T}{{\boldsymbol{w}}_{i}}}\right|}^{2}}}}{{\lambda ^{\mathcal{t}}}}}}\right.}{{\lambda^{\mathcal{t}}}}}+\sigma_{l}^{2} }}}\right)},\tag{9} \end{align*} R(w,vt,vr,λt,λr)=λrl=1∑Krlog 1+∑i=1,=lKr+Kt alTwi 2/∑i=1,=lKr+Kt alTwi 2λrλr+σl2 alTwl 2/ alTwl 2λrλr +λtl=Kr+1∑Kr+Ktlog 1+∑i=1,=lKr+Kt alTwi 2/∑i=1,=lKr+Kt alTwi 2λtλt+σl2 alTwl 2/ alTwl 2λtλt ,(9)
在(9)中,波束成形向量集合 w \mathbf{w} w和RIS系数 v t , v r \boldsymbol{v}^t, \boldsymbol{v}^r vt,vr在分子和分母中非线性耦合。此外,存在多个数据速率的求和,这使得该目标函数难以处理。如果只有一个用户,优化数据速率等价于最大化信号干扰加噪声比(SINR),因此可以采用二次变换[47]来处理该单个分式。另一方面,由于存在多个用户,我们需要为(9)的情况使用如下等效的和速率函数。

F 1 ( w , ρ , x , v t , v r , λ t , λ r ) = λ r ∑ l = 1 K r [ log ( 1 + ρ l ) − ρ l ] + λ t ∑ l = K r + 1 K r + K t [ log ( 1 + ρ l ) − ρ l ] + λ r ∑ l = 1 K r { 2 ( 1 + ρ l ) R e [ x l ‾ a l T w l ] − ( 1 + ρ l ) ∣ x l ∣ 2 ( ∑ i = 1 K r + K t ∣ a l T w i ∣ 2 + λ r σ l 2 ) } + λ t ∑ l = K r + 1 K r + K t { 2 ( 1 + ρ l ) R e [ x l ‾ a l T w l ] − ( 1 + ρ l ) ∣ x l ∣ 2 ( ∑ i = 1 K r + K t ∣ a l T w i ∣ 2 + λ t σ l 2 ) } , \begin{align*} {{\rm{{\cal F}}}_{1}}\left({{{\boldsymbol w}},{\boldsymbol{\rho}},{ {\boldsymbol x}},{{{\boldsymbol v}}^{\mathcal{t}}},{{{\boldsymbol v}}^{\mathcal{r}}},{{\lambda}^{\mathcal {t}}},{{\lambda}^{\mathcal{r}}}}\right)= & \lambda^{\mathcal{r}} \sum\limits_{l=1}^{K^{\mathcal{r}}}{\left[{\log\left({1+{\rho_{l}}}\right)-{ \rho_{l}}}\right]}+\lambda^{\mathcal{t}}\sum\limits_{l={K^{\mathcal{r}}}+1}^{K ^{\mathcal{r}}+K^{\mathcal{t}}}{\left[{\log\left({1+{\rho_{l}}}\right)-{\rho_{ l}}}\right]} \\ & +\lambda^{\mathcal{r}}\sum\limits_{l=1}^{K^{\mathcal{r}}}{\left\{{2\left({1+{\rho_{l}}}\right){\mathop{\rm Re}\nolimits}\left[{ \overline{{x_{l}}}{{{{{\boldsymbol a}}_{l}^{T}}}}{{{\boldsymbol w}}_{l}}}\right]-\left({1+{\rho_ {l}}}\right){{\left|{{x_{l}}}\right|}^{2}}\left({\sum\limits_{i=1}^{K^{ \mathcal{r}}+K^{\mathcal{t}}}{{{\left|{{{{{{\boldsymbol a}}_{l}^{T}}}}{{{\boldsymbol w}}_{i}}} \right|}^{2}}+{{\lambda}^{\mathcal{r}}}\sigma_{l}^{2}}}\right)}\right\}} \\ & +\lambda^{\mathcal{t}}\sum\limits_{l=K^{\mathcal{r}}+1}^{K^{ \mathcal{r}}+K^{\mathcal{t}}}{\left\{{2\left({1+{\rho_{l}}}\right){ \mathop{\rm Re}\nolimits}\left[{\overline{{x_{l}}}{{{{{\boldsymbol a}}_{l}^{T}}}}{{{\boldsymbol w}}_{l}}}\right]-\left({1+{\rho_{l}}}\right){{\left|{{x_{l}}}\right|}^{2}} \left({\sum\limits_{i=1}^{K^{\mathcal{r}}+K^{\mathcal{t}}}{{{\left|{{{{{{\boldsymbol a} }_{l}^{T}}}}{{{\boldsymbol w}}_{i}}}\right|}^{2}}+{{\lambda}^{\mathcal{t}}}\sigma_{l}^{ 2}}}\right)}\right\}}, \tag{10} \end{align*} F1(w,ρ,x,vt,vr,λt,λr)=λrl=1∑Kr[log(1+ρl)−ρl]+λtl=Kr+1∑Kr+Kt[log(1+ρl)−ρl]+λrl=1∑Kr⎩ ⎨ ⎧2(1+ρl)Re[xlalTwl]−(1+ρl)∣xl∣2 i=1∑Kr+Kt alTwi 2+λrσl2 ⎭ ⎬ ⎫+λtl=Kr+1∑Kr+Kt⎩ ⎨ ⎧2(1+ρl)Re[xlalTwl]−(1+ρl)∣xl∣2 i=1∑Kr+Kt alTwi 2+λtσl2 ⎭ ⎬ ⎫,(10)
证明引理3
首先,为了处理(9)中的分数形式的对数求和目标函数,引入了闭合形式的分数规划(FP)方法[47], [64],该方法包含两个关键步骤。
- 拉格朗日对偶变换:对数函数可以通过辅助变量 ρ \rho ρ表示为:
log ( 1 + γ ) = max ρ log ( 1 + ρ ) − ρ + ( 1 + ρ ) γ 1 + γ , ( 48 ) \log(1 + \gamma) = \max_{\rho} \log(1 + \rho) - \rho + \frac{(1 + \rho)\gamma}{1 + \gamma}, \qquad (48) log(1+γ)=ρmaxlog(1+ρ)−ρ+1+γ(1+ρ)γ,(48)
where the optimal solution occurs at ρ = γ ρ = γ ρ=γ. Based on (48),the objective function (9) can be written as
R ( w , v t , v r , λ t , λ r ) = max ρ λ r ∑ l = 1 K r log ( 1 + ρ l ) − ρ l + ( 1 + ρ l ) ∣ a l T w l ∣ 2 ∑ i = 1 K r + K t ∣ a l T w i ∣ 2 + λ r σ l 2 + λ t ∑ l = K r + 1 K r + K t log ( 1 + ρ l ) − ρ l + ( 1 + ρ l ) ∣ a l T w l ∣ 2 ∑ i = 1 K r + K t ∣ a l T w i ∣ 2 + λ t σ l 2 . (49) \begin{aligned}&\mathscr{R}\left(\boldsymbol{w},\boldsymbol{v}^t,\boldsymbol{v}^r,\lambda^t,\lambda^r\right)=\\&\max_\rho\lambda^r\sum_{l=1}^{K^r}\log\left(1+\rho_l\right)-\rho_l+\frac{(1+\rho_l)\left|\boldsymbol{a}_l^T\boldsymbol{w}_l\right|^2}{\sum_{i=1}^{K^r+K^t}\left|\boldsymbol{a}_l^T\boldsymbol{w}_i\right|^2+\lambda^r\sigma_l^2}\\&\begin{aligned}&+\lambda^t\sum_{l=K^r+1}^{K^r+K^t}\log\left(1+\rho_l\right)-\rho_l+\frac{(1+\rho_l)\left|\boldsymbol{a}_l^T\boldsymbol{w}_l\right|^2}{\sum_{i=1}^{K^r+K^t}\left|\boldsymbol{a}_l^T\boldsymbol{w}_i\right|^2+\lambda^t\sigma_l^2}.\end{aligned}\end{aligned}\tag{49} R(w,vt,vr,λt,λr)=ρmaxλrl=1∑Krlog(1+ρl)−ρl+∑i=1Kr+Kt alTwi 2+λrσl2(1+ρl) alTwl 2+λtl=Kr+1∑Kr+Ktlog(1+ρl)−ρl+∑i=1Kr+Kt alTwi 2+λtσl2(1+ρl) alTwl 2.(49)第二步是处理(49)中的分式项。- 二次变换:通过引入辅助变量 x x x,以下方程成立:
∣ A ( u ) ∣ 2 B ( u ) = 2 Re { x ˉ A ( u ) } − ∣ x ∣ 2 B ( u ) . ( 50 ) \frac{|A(\boldsymbol u)|^2}{B(\boldsymbol u)} = 2\text{Re} \left\{\bar{x} A(\boldsymbol u)\right\} - |x|^2 B(\boldsymbol u). \qquad (50) B(u)∣A(u)∣2=2Re{xˉA(u)}−∣x∣2B(u).(50)
令 x = A ( u ) B ( u ) x = \frac{A(\boldsymbol u)}{B(\boldsymbol u)} x=B(u)A(u)可以证明其是相等的。利用(50)中的变换,(49)可转化为:
R ( w , v t , v r , λ t , λ r ) = max ρ , x F 1 ( w , ρ , x , v t , v r , λ t , λ r ) , ( 51 ) \mathcal{R} \left(\mathbf{w}, \boldsymbol v^t, \boldsymbol v^r, \lambda^t, \lambda^r \right) = \max_{\rho, x} \mathcal{F}_1 \left(\mathbf{w}, \rho, x, \mathbf{v}^t, \mathbf{v}^r, \lambda^t, \lambda^r \right), \qquad (51) R(w,vt,vr,λt,λr)=ρ,xmaxF1(w,ρ,x,vt,vr,λt,λr),(51)
其中 F 1 \mathcal{F}_1 F1在(10)中定义。
注意到此处给出的公式和原本的FP论文给出的不一致,但我觉得此公式非常有用, x x x可以是复数的形式。
A. 优化 x , ρ , w , λ t x, \rho, \mathbf{w}, \lambda^t x,ρ,w,λt 和 λ r \lambda^r λr
在块坐标下降 (BCD) 方法下,关于辅助变量 ( x, \rho )、波束形成向量 ( \mathbf{w} ) 和时间分配变量 ({ \lambda^t, \lambda^r }) 的子问题是凸优化问题,因此相对容易处理。
优化辅助变量 ( x )
注意到 (\mathcal{F}1) 是关于 ( \mathbf{x} ) 的凸函数,其中每个元素 ({x_l}{l=1}{Kr + K^t}) 是可分离的,我们对 (\mathcal{F}_1) 关于每个 ( x_l ) 求导并令其为零,得到如下最优解:
x l = { a l T w l Σ i = 1 K r + K t ∣ a l T w i ∣ 2 + λ r σ l 2 , l ∈ K r , a l T w l Σ i = 1 K r + K t ∣ a l T w i ∣ 2 + λ t σ l 2 , l ∈ K t . \begin{align*} {x_{l}}=\left\{ \begin{array}{l}\frac{{{{{{\boldsymbol a}}_{l}^{T}}}{{{\boldsymbol w}}_ {l}}}}{{\Sigma_{i=1}^{K^{\mathcal{r}}+K^{\mathcal{t}}}{{{\left|{{{{{\boldsymbol a}}_{l} ^{T}}}{{{\boldsymbol w}}_{i}}}\right|}^{2}}+\lambda^{\mathcal{r}}\sigma_{l}^{2}}}},\;\; \;\;l\in{\cal K}^{\mathcal{r}},\\[4pt] \frac{{{{{{\boldsymbol a}}_{l}^{T}}}{{{\boldsymbol w}}_{l}}}}{{\Sigma_{i=1}^{K^{\mathcal{r}}+K^{ \mathcal{t}}}{{{\left|{{{{{\boldsymbol a}}_{l}^{T}}}{{{\boldsymbol w}}_{i}}}\right|}^{2}}+ \lambda^{\mathcal{t}}\sigma_{l}^{2}}}},\;\;\;\;l\in{\cal K}^{\mathcal{t}}. \end{array}\right.\tag{12} \end{align*} xl=⎩ ⎨ ⎧Σi=1Kr+Kt∣alTwi∣2+λrσl2alTwl,l∈Kr,Σi=1Kr+Kt∣alTwi∣2+λtσl2alTwl,l∈Kt.(12)
注意一下这里毕竟坑的一点,实际上是对 x l ⋆ x_l^\star xl⋆ 求导,而不是对 x l x_l xl 求导
优化辅助变量 ( \rho )
由于 (\rho) 中的每个元素也是可分离的,我们对 (\mathcal{F}_1) 关于每个 (\rho_l \ (l = 1,2,…, Kr+Kt)) 求导并令其为零,得到如下结果:
ρ l = { ∣ a l T w l ∣ 2 ∑ i = 1 , i ≠ l K r + K t ∣ a l T w i ∣ 2 + λ r σ l 2 , l ∈ K r ∣ a l T w l ∣ 2 ∑ i = 1 , i ≠ l K r + K t ∣ a l T w i ∣ 2 + λ t σ l 2 , l ∈ K t (13) \rho_l = \begin{cases} \frac{|\mathbf{a}_l^T \mathbf{w}_l|^2}{\sum_{i=1, i \neq l}^{K^r+K^t} |\mathbf{a}_l^T \mathbf{w}_i|^2 + \lambda^r \sigma_l^2}, & l \in \mathcal{K}^r \\ \frac{|\mathbf{a}_l^T \mathbf{w}_l|^2}{\sum_{i=1, i \neq l}^{K^r+K^t} |\mathbf{a}_l^T \mathbf{w}_i|^2 + \lambda^t \sigma_l^2}, & l \in \mathcal{K}^t \end{cases} \tag{13} ρl=⎩ ⎨ ⎧∑i=1,i=lKr+Kt∣alTwi∣2+λrσl2∣alTwl∣2,∑i=1,i=lKr+Kt∣alTwi∣2+λtσl2∣alTwl∣2,l∈Krl∈Kt(13)
优化波束形成向量 ( \mathbf{w} )
考虑与 ( \mathbf{w} ) 相关的部分(如式(11)),关于 ( \mathbf{w} ) 的子问题为:
目标函数:
min w ∑ l = 1 K r + K t { w l H Ξ w l − 2 Re [ q l H w l ] } (14a) \min_{\mathbf{w}} \sum_{l=1}^{K^r+K^t} \left\{ \mathbf{w}_l^H \boldsymbol{\Xi} \mathbf{w}_l - 2 \operatorname{Re} \left[ \mathbf{q}_l^H \mathbf{w}_l \right] \right\} \tag{14a} wminl=1∑Kr+Kt{wlHΞwl−2Re[qlHwl]}(14a)
约束条件:
∑ l = 1 K r + K t w l H w l ≤ P B S . (14b) \sum_{l=1}^{K^r+K^t} \mathbf{w}_l^H \mathbf{w}_l \leq P_{BS}. \tag{14b} l=1∑Kr+KtwlHwl≤PBS.(14b)
V. SIMULATION RESULTS AND DISCUSSIO
在本部分中,我们通过仿真评估下行链路的总速率传输性能。所有问题实例均在Windows x64桌面平台上使用Matlab-R2023a进行仿真,硬件配置为2.8 GHz CPU和16 GB RAM。仿真结果通过对100次仿真试验的平均值获得。仿真中使用了并行处理指数 P = 4 P=4 P=4。
在仿真设置中,基站(BS)和STAR-RIS分别位于坐标 ( 0 , 20 m ) (0, 20\text{m}) (0,20m)和 ( 40 m , 0 ) (40\text{m}, 0) (40m,0)。STAR-RIS沿 y y y轴放置并垂直于地面。反射和透射用户在距离STAR-RIS两侧8米范围内均匀分布。参数 { G , h l , d l } \{G, h_l, d_l\} {G,hl,dl}被建模为Rician衰落信道,包含视距(LoS)和非视距(NLoS)分量[50]。以 h l h_l hl为例,Rician衰落信道模型为:
h l = ν h l κ h + 1 ( κ h h l LoS + h l NLoS ) h_l = \sqrt{\frac{\nu h_l}{\kappa_h + 1}} \left( \sqrt{\kappa_h} h_l^{\text{LoS}} + h_l^{\text{NLoS}} \right) hl=κh+1νhl(κhhlLoS+hlNLoS)
其中每个参数的具体定义如下:
-
路径损耗参数
ν h l = L 0 ( d h l d 0 ) − α h \nu h_l = L_0 \left(\frac{d_{hl}}{d_0}\right)^{-\alpha_h} νhl=L0(d0dhl)−αh表示从RIS到第 l l l个用户的距离相关路径损耗,其中 L 0 = − 30 dB L_0 = -30\text{dB} L0=−30dB表示参考距离 d 0 = 1 m d_0=1\text{m} d0=1m处的路径损耗, d h l d_{hl} dhl是STAR-RIS与第 l l l个用户之间的距离, α h = 2.2 \alpha_h = 2.2 αh=2.2为RIS-用户链路的路径损耗指数。相应地,BS-RIS链路和BS-用户链路的路径损耗指数分别为2.2和3.6。 -
Rician因子
κ h \kappa_h κh为RIS-用户链路的Rician因子,较高的Rician因子表示较强的LoS分量。当Rician因子为0时,表明不存在LoS信号,信道简化为Rayleigh衰落。在仿真中,RIS-用户链路的Rician因子 κ h \kappa_h κh设定为5,相应地,BS-RIS链路和BS-用户链路的Rician因子分别为5和0。 -
LoS分量
h l LoS h_l^{\text{LoS}} hlLoS建模为阵列响应的导向矢量,其第 m m m个元素为:
h l LoS [ m ] = e j 2 π ( m − 1 ) d A sin ( ω ) / λ h_l^{\text{LoS}}[m] = e^{j2\pi(m-1)d_A \sin(\omega)/\lambda} hlLoS[m]=ej2π(m−1)dAsin(ω)/λ
其中, ω \omega ω表示到达角(AoA)或离开角(AoD)。在仿真中,设 d A / λ = 1 / 2 d_A/\lambda=1/2 dA/λ=1/2,且 ω \omega ω在 [ 0 , 2 π ) [0, 2\pi) [0,2π)范围内均匀分布。而 h l NLoS h_l^{\text{NLoS}} hlNLoS表示NLoS分量信号,其每个元素服从归一化复高斯分布。
为了避免重复描述图例中的参数, ( M , N , K r , K t , L , P B S , σ l 2 ) (M, N, K_r, K_t, L, P_{BS}, \sigma^2_l) (M,N,Kr,Kt,L,PBS,σl2)的设置详见各图的图例说明。
在实现过程中,采用指数增长的 γ \gamma γ更新方式: γ ← γ × 1.2 \gamma \gets \gamma \times 1.2 γ←γ×1.2,这是现有涉及惩罚方法的研究中广泛采用的[51]-[54]。惩罚参数不断增加,直至交替优化中的 v t , v r v_t, v_r vt,vr与 ϕ t , ϕ r \phi_t, \phi_r ϕt,ϕr的差距低于预定义的容差范围。已知只要惩罚参数在每次迭代中的增长幅度保持在适度范围内,性能将保持不变。 仿真结果如图4(a)和4(b)所示,分别对应于ES STAR-RIS和MS STAR-RIS。

图5比较了八种STAR-RIS的总速率性能,采用了提出的通用优化框架。首先可以看到,额外的离散相位约束仅略微降低了网络吞吐量(ES的两离散相位约束下降2.94%,MS和TS分别下降6.16%和8.31%),这与文献[55]中的结论不同。文献[55]认为稀疏相位(少于8相位)会显著影响性能,原因在于[55]的结论基于从连续相位解到最近离散相位的量化。在允许的离散相位数极少(例如仿真中仅允许2个相位)的情况下,连续相位与最近离散值差异很大。由于量化是独立应用于每个RIS单元的,与连续优化解相比,累积性能退化将非常显著。相比之下,本文提出的算法中辅助变量 ϕ t , ϕ r \phi_t, \phi_r ϕt,ϕr仅受到相位约束的影响,这可以被视为对 v t , v r v_t, v_r vt,vr的相位校正,而不仅仅是相位约束的直接作用。通过本文提出的统一惩罚框架,首次揭示了这一洞见,并提供了便于比较的方式。
与直接将 v t , v r v_t, v_r vt,vr量化为 ϕ t , ϕ r \phi_t, \phi_r ϕt,ϕr不同,本文引入了惩罚项来实现间接量化,这为 v v v和 ϕ \phi ϕ在搜索更优解时提供了更大的自由度。这种方式避免了显著的性能损失,表明量化是导致性能退化的更重要因素,而不是离散相位本身。
其次,需要注意的是,MS和TS模式中的离散相位约束导致的性能损失比ES模式更明显。这可能是因为MS和TS STAR-RIS系数上额外施加了约束条件(1c)。在没有幅度约束的情况下,ES STAR-RIS可以通过优化幅度来弥补离散相位约束带来的损失。
第三(Thirdly),从图5的放大部分可以观察到,与非耦合相位情况相比,STAR-RIS中连续耦合相位约束(continuous coupled-phase constraint)对系统吞吐量几乎没有影响(仅0.89%的损失),这一结果与文献[20]的结论一致。相反,在MS模式下,由0-1幅度约束引入的吞吐量下降更加明显。这一洞见首次被揭示,这是因为提出的统一惩罚框架使得比较更加容易。

图6(a)和6(b)聚焦于具有耦合相位的ES STAR-RIS(即表1中的案例7和8),比较了本文提出的算法与以下算法的收敛性能:逐元素交替优化算法(elementwise-AO)[19]、耦合相位STAR-RIS框架(CP框架)[20]以及基于惩罚的保密波束成形算法(PSB算法)[34]。虽然原始PSB算法是为保密总速率设计的,但我们可以对其进行修改以处理总速率最大化问题。
对于图6(a)中的连续耦合相位情况,本文提出的算法在最短的执行时间内收敛到最高的总速率。相比之下,PSB算法和CP框架的性能略逊一筹,而逐元素交替优化(elementwise-AO)的表现最差。如命题1(第二节B部分)之前所述,CP框架和PSB算法所需的惩罚权重比本文提出的算法更大,从而减缓了它们的收敛速度。另一方面,逐元素交替优化需要在STAR-RIS逐元素级别上求解非凸子问题,这些问题通过SCA和CVX解决,因此计算量非常大。

为了进一步说明本文提出的算法和对比算法的复杂性,表3总结了各种算法的复杂度,其中 I A O I_{AO} IAO表示交替优化(AO)迭代次数。注意,本文框架中的 ς \varsigma ς为二分搜索的精度。从表3可以看出,忽略所有方法共有的项后,本文框架的复杂度在每次迭代中与 M M M呈线性关系,即 O ( M ) O(M) O(M)。相比之下,CP框架和PSB算法在每次迭代中的复杂度至少为 O ( M 2 ) O(M^2) O(M2)。

由于STAR-RIS的单元数量 M M M通常大于基站天线数量 N N N以及用户数量 K r K^r Kr和 K t K^t Kt,CP框架和PSB算法的复杂度会远高于本文提出的框架。虽然逐元素交替优化(elementwise AO)算法没有外部惩罚循环,其复杂度包含 I A O ⋅ O ( M 3.5 ) I_{AO} \cdot O(M^{3.5}) IAO⋅O(M3.5)项,这显著降低了其整体执行速度。
由于本文方法在每次迭代中的复杂度较低,如图6(a)所示,与CP框架和PSB算法相比,本文算法将计算时间减少了近10倍;与逐元素交替优化算法相比,计算时间减少了近100倍。需要注意的是,由于CP框架、PSB算法和本文提出的算法引入了惩罚项,总速率可能不会随着迭代次数单调增加,因为单调性仅适用于包含惩罚项的目标函数。
相关文章:

A Unified Framework for STAR-RIS Coefficients Optimization
文章目录 AbstractB. A Penalty-based Reformulation of (1) III. OPTIMIZING AUXILIARY VARIABLES φ \boldsymbol φ φ IN P1IV. A CASE STUDY OF P2 ON DOWNLINK STAR-RIS ASSISTED TRANSMISSION SYSTEMA. 优化 x , ρ , w , λ t x, \rho, \mathbf{w}, \lambda^t x,ρ,w…...

rebase ‘A‘ onto ‘master‘ 和 merge ‘master‘ into ‘A‘有什么区别
在Git版本控制系统中,rebase 和 merge 是两种不同的操作,用于合并分支。rebase A onto master 和 merge master into A 虽然最终目的都是将两个分支的更改合并在一起,但它们在处理方式和结果上有所不同。 rebase ‘A’ onto ‘master’ 含义…...

谷歌发布最新视频生成模型 Veo 2:视频生成AI新王牌
谷歌 在当今数字化快速发展的时代,人工智能视频生成技术正不断突破创新。就在12月17日,谷歌推出了一个新的视频模型 Veo 2 。 Veo 2 Veo 2 Veo 2 可以创建各种主题和风格的高质量视频。在谷歌官方由人工评估员判断中,Veo 2 与领先模型相比取得…...

2025erp系统开源免费进销存系统搭建教程/功能介绍/上线即可运营软件平台源码
系统介绍 基于ThinkPHP与LayUI构建的全方位进销存解决方案 本系统集成了采购、销售、零售、多仓库管理、财务管理等核心功能模块,旨在为企业提供一站式进销存管理体验。借助详尽的报表分析和灵活的设置选项,企业可实现精细化管理,提升运营效…...

基于Docker的Minio分布式集群实践
目录 1. 说明 2. 配置表 3. 步骤 3.1 放行服务端口 3.2 docker-compose 编排 4. 入口反向代理与负载均衡配置 4.1 api入口 4.2 管理入口 5. 用例 6. 参考 1. 说明 以多节点的Docker容器方式实现minio存储集群,并配以nginx反向代理及负载均衡作为访问入口。…...

解决node.js的req.body为空的问题
从昨晚一直在试,明明之前用的封装的axios发送请求给其他的后端(springboot)是可以的,但昨天用了新项目的后端(node.js)就不行。 之前用了代理,所以浏览器发送的post请求不会被拦截,…...

数据结构期末算法复习:树、查找、排序
一、树 1.二叉链-定义 typedef struct BiTNode{ ElemType data;//数据域 struct BiTNode *lchild ,*rchild;//左、右孩子指针 }BiTNode , *BiTree ;2.查找值为x的结点 BTNode FindNode(BTNode b,ElemType x) { BTNode *p;if (bNULL) return NULL;else if (…...

复习打卡Linux篇
目录 1. Linux常用操作命令 2. vim编辑器 3. 用户权限 4. Linux系统信息查看 1. Linux常用操作命令 基础操作: 命令说明history查看历史执行命令ls查看指定目录下内容ls -a查看所有文件 包括隐藏文件ls -l ll查看文件详细信息,包括权限类型时间大小…...

OpenAI API深度解析:参数、Token、计费与多种调用方式
随着人工智能技术的飞速发展,OpenAI API已成为许多开发者和企业的得力助手。本文将深入探讨OpenAI API的参数、Token、计费方式,以及如何通过Rest API(以Postman为例)、Java API调用、工具调用等方式实现与OpenAI的交互࿰…...

Centos7 部署ZLMediakit
1、拉取代码 #国内用户推荐从同步镜像网站gitee下载 git clone --depth 1 https://gitee.com/xia-chu/ZLMediaKit cd ZLMediaKit #千万不要忘记执行这句命令 git submodule update --init 2、安装编译器 sudo yum -y install gcc 3、安装cmake sudo yum -y install cmake 4…...

python:用 sklearn.metrics 评价 K-Means 聚类模型
sklearn 的 metrics 模块提供的聚类模型评价指标如下: ARI 评价法(兰德系数): adjusted_rand_score AMI 评价法(相互信息): adjusted_mutual_info_score V-measure 评分 : completeness_score FMI 评价法 : fowlkes_m…...

谁说C比C++快?
看到这个问题,我我得说:这事儿没有那么简单。 1. 先把最大的误区打破 "C永远比C快" —— 某位1990年代的程序员 这种说法就像"自行车永远比汽车省油"一样荒谬。我们来看个例子: // C风格 char* str (char*)malloc(100…...

算法刷题Day23:BM60 括号生成
题目链接 描述:给出n对括号,请编写一个函数来生成所有的由n对括号组成的合法组合。 例如,给出n3,解集为: “((()))”, “(()())”, “(())()”, “()()()”, “()(())” 思路: 回溯左子树不断添加‘&#…...

基于Redis实现令牌桶算法
基于Redis实现令牌桶算法 令牌桶算法算法流程图优点缺点 实现其它限流算法 令牌桶算法 令牌桶是一种用于分组交换和电信网络的算法。它可用于检查数据包形式的数据传输是否符合定义的带宽和突发性限制(流量不均匀或变化的衡量标准)。它还可以用作调度算…...

XXE练习
pikachu-XXE靶场 1.POC:攻击测试 <?xml version"1.0"?> <!DOCTYPE foo [ <!ENTITY xxe "a">]> <foo>&xxe;</foo> 2.EXP:查看文件 <?xml version"1.0"?> <!DOCTYPE foo [ <!ENTITY xxe SY…...

Mac上使用ln指令创建软链接、硬链接
在Mac、Linux和Unix系统中,软连接(Symbolic Link)和硬连接(Hard Link)是两种不同的文件链接方式。它们的主要区别如下: 区别: 硬连接: 不能跨文件系统。不能链接目录(为…...

单元测试-Unittest框架实践
文章目录 1.Unittest简介1.1 自动化测试用例编写步骤1.2 相关概念1.3 用例编写规则1.4 断言方法 2.示例2.1 业务代码2.2 编写测试用例2.3 生成报告2.3.1 方法12.3.2 方法2 1.Unittest简介 Unittest是Python自带的单元测试框架,适用于:单元测试、Web自动…...

JAVA没有搞头了吗?
前言 今年的Java程序员群体似乎承受着前所未有的焦虑。投递简历无人问津,难得的面试机会也难以把握,即便成功入职,也往往难以长久。于是,不少程序员感叹:互联网的寒冬似乎又一次卷土重来,环境如此恶劣&…...

ECharts 饼图:数据可视化的重要工具
ECharts 饼图:数据可视化的重要工具 引言 在数据分析和可视化的领域,ECharts 是一个广受欢迎的开源库。它由百度团队开发,用于在网页中创建交互式图表。ECharts 提供了多种图表类型,包括柱状图、折线图、散点图等,而饼图则是其中最常用的一种。本文将深入探讨 ECharts 饼…...
)
arcGIS使用笔记(无人机tif合并、导出、去除黑边、重采样)
无人机航拍建图之后,通过大疆智图软件可以对所飞行的区域的进行拼图,但是如果需要对拼好的图再次合并,则需要利用到arcGIS软件。下面介绍arcGIS软件在这个过程中常用的操作。 1.导入tif文件并显示的方法:点击“”图标进行导入操作…...

0 前言
ArCS作为一个基于Rust的CAD(计算机辅助设计)开源系统,尽管已经有四年未更新,但其设计理念和技术实现仍然具有很高的学习和参考价值。以下是对ArCS项目的进一步分析和解读: 一、项目亮点与技术优势 高效与安全的Rust语…...

ubuntu server 安装
1 获取ubuntu https://ubuntu.com/download/server 2 安装ubuntu 详细教程查看视频: ubunut server 安装_哔哩哔哩_bilibili...

linux 添加默认网关
在linux 可以使用 route 命令添加默认网关,假设添加的默认网关是192.168.159.2 添加方式如下: route add default gw 192.168.159.2 以上命令只需要把add 改成 del ,就能删除刚才添加的路由 route del default gw 192.168.159.2 #该命…...

一个开源的自托管虚拟浏览器项目,支持在安全、私密的环境中使用浏览器
大家好,今天给大家分享一个开源的自托管虚拟浏览器项目Neko,旨在利用 WebRTC 技术在 Docker 容器中运行虚拟浏览器,为用户提供安全、私密且多功能的浏览体验。 项目介绍 Neko利用 WebRTC 技术在 Docker 容器中运行虚拟浏览器,提供…...
)
Qt之修改窗口标题、图标以及自定义标题栏(九)
Qt开发 系列文章 - titles-icons-titlebars(九) 目录 前言 一、修改标题 二、添加图标 三、更换标题栏 1.效果演示 2.创建标题栏类 3.定义相关函数 4.使用标题栏类 总结 前言 在我们利用Qt设计软件时,经常需要修改窗口标题、更改软…...

can总线相关概念---frame-signal-message
1、frame 帧是数据链路层的传输单元。它将上层传入的数据添加一个头部和尾部,组成了帧。它的起始点和目的点都是数据链路层。 2、signal 3、message-报文 我们将位于应用层的信息分组称为报文。报文是网络中交换与传输的数据单元,也是网络传输的单元。…...

全排列 dfs
给定一个由不同的小写字母组成的字符串,输出这个字符串的所有全排列。 我们假设对于小写字母有 a<b<…<y<z ,而且给定的字符串中的字母已经按照从小到大的顺序排列。 输入格式 输入只有一行,是一个由不同的小写字母组成的字符串…...

画图,matlab,
clear;close all;clc;tic;dirOutput dir(*.dat); % 罗列所有后缀-1.dat的文件列表,罗列BDDATA的数据 filenames string({dirOutput.name}); % 提取文件名%% 丢包统计 FILENAMES [""]; LOSS_YTJ [ ]; LOSS_RAD [ ]; LOSS_ETH [ ]…...

any/all 子查询优化规则的原理与解析 | OceanBase查询优化
背景 在通常情况下,当遇到包含any/all子查询的语句时,往往需要遵循嵌套执行的方式,因此其查询效率较低。Oceanbase中制定了相应的any/all子查询优化规则,能够能够识别并优化符合条件的any/all子查询,从而有效提升查询…...

Visio——导出的PDF文件缺乏嵌入字体的解决办法 / 设置导出的PDF文件添加嵌入字体的方法
导出PDF时,勾选 “符合PDF/A” 选项 这样就导出的PDF文件添加了嵌入字体了。...

python:用 sklearn SVM 构建分类模型,并评价
编写 test_sklearn_5.py 如下 # -*- coding: utf-8 -*- """ 使用 sklearn 估计器构建分类模型,并评价 """ import numpy as np import matplotlib.pyplot as plt from sklearn import datasets from sklearn.svm import SVC from sk…...

【Python】制作函数,并且实现【注册】【登录】功能
这段代码是一个简单的命令行论坛模拟系统,包含了用户注册、登录和退出的功能。让我们逐行分析代码,并解释每个部分的功能与逻辑: ### 1. 引入 hashlib 模块 python import hashlib - **功能**:引入 Python 内置的 hashlib 模块…...

【大模型】LLaMA-2:Open Foundation and Fine-Tuned Chat Models, July. 2023.
论文:LLaMA-2:Open Foundation and Fine-Tuned Chat Models, July. 2023. 链接:https://arxiv.org/abs/2307.09288 Introduction 创新点 7B - 70B 预训练 微调 开源Llama 2 和Llama 2-Chat,针对对话用例进行了优化Motivation A…...
- 重传机制(01) RTX NACK概述)
WebRTC服务质量(04)- 重传机制(01) RTX NACK概述
WebRTC服务质量(01)- Qos概述 WebRTC服务质量(02)- RTP协议 WebRTC服务质量(03)- RTCP协议 WebRTC服务质量(04)- 重传机制(01) RTX NACK概述 WebRTC服务质量(…...

Qt之connectSlotsByName分析
简介 用于界面设置信号槽自动生成,要求槽函数定义形式为on_< objectName >_< signal > connectSlotsByName 其定义在QMetaObject类中,为静态方法,在文件qobjectdefs.h struct Q_CORE_EXPORT QMetaObject {....static void c…...
)
【Unity3D】无限循环列表(扩展版)
基础版:【Unity技术分享】UGUI之ScrollRect优化_ugui scrollrect 优化-CSDN博客 using UnityEngine; using UnityEngine.UI; using System.Collections.Generic;public delegate void OnBaseLoopListItemCallback(GameObject cell, int index); public class BaseLo…...

校园点餐订餐外卖跑腿Java源码
简介: 一个非常实用的校园外卖系统,基于 SpringBoot 和 Vue 的开发。这一系统源于黑马的外卖案例项目 经过站长的进一步改进和优化,提供了更丰富的功能和更高的可用性。 这个项目的架构设计非常有趣。虽然它采用了SpringBoot和Vue的组合&am…...

如何使用 Python 连接 PostgreSQL 数据库?
在Python开发中,连接PostgreSQL数据库是一个常见的需求。 我们可以使用多种库来实现这一功能,其中最常用的是psycopg2。 下面我将详细介绍如何使用psycopg2来连接PostgreSQL数据库,并提供一些实际开发中的建议和注意事项。 1. 使用 psycop…...

音频开发中常见的知识体系
在 Linux 系统中,/dev/snd 目录包含与声音设备相关的文件。每个文件代表系统中的一部分音频硬件或音频控制接口。以下是你列出的文件及其含义: 一.基本术语 样本长度(sample):样本是记录音频数据最基本的单位,计算机对每个通道采…...
)
国内外人工智能AI工具网站大全(一键收藏,应有尽有)
本文由 大侠(AhcaoZhu)原创,转载请声明。 链接: https://blog.csdn.net/Ahcao2008 国内外人工智能AI工具网站大全(一键收藏,应有尽有) 摘要一、AI写作工具二、AI图像工具2.1、常用AI图像工具2.2、AI图片插画生成2.3、AI图片背景移…...

HB1910数字IP程控交换机generate.php存在RCE漏洞
免责声明: 本文旨在提供有关特定漏洞的深入信息,帮助用户充分了解潜在的安全风险。发布此信息的目的在于提升网络安全意识和推动技术进步,未经授权访问系统、网络或应用程序,可能会导致法律责任或严重后果。因此,作者不对读者基于本文内容所采取的任何行为承担责任。读者在…...

基于Spring Boot的社区药房系统
一、系统背景与目的 随着医疗改革的深入和社区医疗服务的不断完善,社区药房在居民健康保障中扮演着越来越重要的角色。然而,传统的药房管理方式存在着库存管理混乱、药品销售不透明、客户信息管理不规范等问题。为了解决这些问题,基于Spring…...

level2逐笔委托查询接口
沪深逐笔委托队列查询 前置步骤 分配数据库服务器 查询模板 以下是沪深委托队列查询的请求模板: http://<数据库服务器>/sql?modeorder_book&code<股票代码>&offset<offset>&token<token>查询参数说明 参数名类型说明mo…...

固定资产分类,提升资产盘活效益
固定资产是企业长期使用的重要资源,涵盖范围广、种类多,不同的资产需要针对性管理。通过科学的分类与高效的盘活策略,不仅可以优化资源配置,还能提升企业资产的利用效率和经济效益。以下将详细解析固定资产的分类方式和盘活效益的…...

图像根据mask拼接时,边缘有色差 解决
目录 渐变融合(Feathering) 沿着轮廓线模糊: 代码: 泊松融合 效果比较好: 效果图: 源代码: 泊松融合,mask不扩大试验 效果图: 源代码: 两个图像根据mask拼接时,边缘有色差 渐变融合(Feathering) import numpy as np import cv2# 假设 img1, img2 是两个…...

练习题:一维数组
练习题 第一题 键盘录入一组数列,利用冒泡排序将数据由大到小排序 代码 #include <stdio.h>int arr_home01() {int arr[10];int i,j,temp;printf("请输入10个测试整数:\n");int len sizeof(arr) / sizeof(arr[0]);for(i 0;i < …...

Linux系统安装node.js
一、node官网下载想要的node版本 https://nodejs.org/en/download/package-manager 二、将tar.xz文件解压 tar -xvf node-vxxx.tar.xz 三、改文件夹的名字,改成nodejs mv node-xxx nodejs 四、复制nodejs文件,并上传到linux 服务器 /usr/local 目录下…...

lettuce 默认情况下连接池参数不生效,源码分析
先说结论: 1.LettuceConnectionFactory 属性 shareNativeConnection 默认为true,要想连接池生效,该参数设置为false; 2.使用redisTemplate模版封装的pipeline没有意义,autoFlashCommands 默认为true;spring2.0开始默认使用lettuc…...

三维无人机航迹算法的目标函数如何确定
一、定义目标函数 在三维无人机航迹算法中,目标函数的确定通常基于具体的任务需求和飞行约束。以下是一个简单的例子,展示了如何为三维无人机航迹规划定义一个目标函数。 例子:最小化飞行时间和避障的三维无人机航迹规划 1.任务描述:无人机需要从起点飞到终点,同时避开一些…...

Linux docker离线部署
1. Docker下载 Docker下载地址:https://mirrors.dahuatech.com/docker-ce/。本文下载当前最新版本,链接如下:https://mirrors.dahuatech.com/docker-ce/linux/static/stable/aarch64/docker-27.4.0.tgz。 2. 安装Docker 将压缩包上传到服务器…...