FreeRTOS “探究任务调度机制魅力”
引入
现如今随着单片机的资源越来越多,主频越来越高,在面临更复杂的功能实现以及对MCU性能的充分压榨,会RTOS已经成为一个必要的技能,新手刚开始学习的时候就很好奇“为什么代码可以放到两个循环里同时运行?”。接下来我将简要的介绍一下FreeRTOS的任务是怎么调度的(基于 FreeRTOS Kernel V10.5.1)。
一、装载任务的火车“列表(链表)”
列表是一个很基础的数据结构,它像一列火车,火车车厢就是列表项(节点),在FreeRTOS中,列表项的定义如下:
struct xLIST_ITEM
{listFIRST_LIST_ITEM_INTEGRITY_CHECK_VALUE /*< Set to a known value if configUSE_LIST_DATA_INTEGRITY_CHECK_BYTES is set to 1. */configLIST_VOLATILE TickType_t xItemValue; /*< The value being listed. In most cases this is used to sort the list in ascending order. */struct xLIST_ITEM * configLIST_VOLATILE pxNext; /*< Pointer to the next ListItem_t in the list. */struct xLIST_ITEM * configLIST_VOLATILE pxPrevious; /*< Pointer to the previous ListItem_t in the list. */void * pvOwner; /*< Pointer to the object (normally a TCB) that contains the list item. There is therefore a two way link between the object containing the list item and the list item itself. */struct xLIST * configLIST_VOLATILE pxContainer; /*< Pointer to the list in which this list item is placed (if any). */listSECOND_LIST_ITEM_INTEGRITY_CHECK_VALUE /*< Set to a known value if configUSE_LIST_DATA_INTEGRITY_CHECK_BYTES is set to 1. */
};
typedef struct xLIST_ITEM ListItem_t; /* For some reason lint wants this as two separate definitions. */
在这里,xItemValue 值得是列表项的值,多用与按照升序对列表项进行排序。pxNext 指向下一个列表项。pxPrevious 指向前一个列表项。pvOwner 列表项的拥有者(通常指向包含该列表的任务的TCB),常用来快速查看TCB。pxContainer 指向该列表项所在的列表。listFIRST_LIST_ITEM_INTEGRITY_CHECK_VALUE和 listSECOND_LIST_ITEM_INTEGRITY_CHECK_VALUE则是一个空白的宏,编译以后不存在。
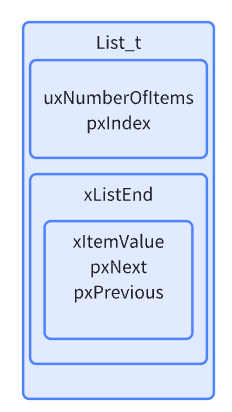
列表则定义在以下:
struct xMINI_LIST_ITEM{listFIRST_LIST_ITEM_INTEGRITY_CHECK_VALUE /*< Set to a known value if configUSE_LIST_DATA_INTEGRITY_CHECK_BYTES is set to 1. */configLIST_VOLATILE TickType_t xItemValue;struct xLIST_ITEM * configLIST_VOLATILE pxNext;struct xLIST_ITEM * configLIST_VOLATILE pxPrevious;};typedef struct xMINI_LIST_ITEM MiniListItem_t;typedef struct xLIST
{listFIRST_LIST_INTEGRITY_CHECK_VALUE /*< Set to a known value if configUSE_LIST_DATA_INTEGRITY_CHECK_BYTES is set to 1. */volatile UBaseType_t uxNumberOfItems;ListItem_t * configLIST_VOLATILE pxIndex; /*< Used to walk through the list. Points to the last item returned by a call to listGET_OWNER_OF_NEXT_ENTRY (). */MiniListItem_t xListEnd; /*< List item that contains the maximum possible item value meaning it is always at the end of the list and is therefore used as a marker. */listSECOND_LIST_INTEGRITY_CHECK_VALUE /*< Set to a known value if configUSE_LIST_DATA_INTEGRITY_CHECK_BYTES is set to 1. */
} List_t;
uxNumberOfItems 是该列表列表项的数目(不包含xListEnd)。pxIndex 是用于指向某一个列表项,常用于遍历列表所用。xListEnd 是迷你列表项,在这里的类型是 xLIST_ITEM,迷你列表项的值一般设置为最大值,以便在排序时排在末尾,同时,xListEnd也用于挂载插入到其他列表中的列表项,说人话就是xListEnd就是链表中的哨兵节点,它的下一个列表项就是表头,前一个就是表尾。
因此,在FreeRTOS中的列表是一个带头双向环形列表,简化出来就是:
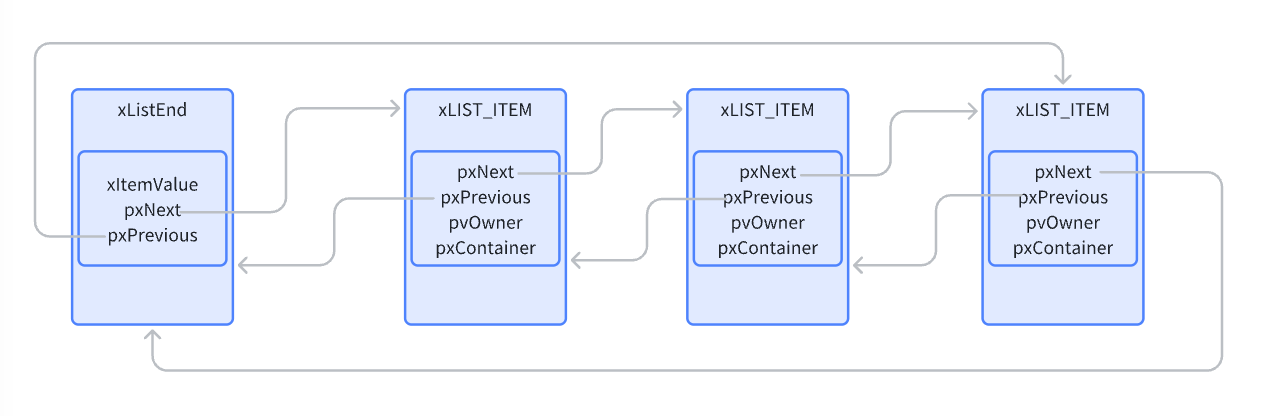
通过这种机制可以及时快速的访问到自己想要的列表项节点。
至于链表的增删查改等内容在这里便不再做过多赘述,相反的,这种双向链表的增删查改比单项不带头链表的操作简单的多,在RTOS的文件里也就寥寥一百多行。
二、RTOS中的几个列表
1.就绪列表
处于正常调度状态的列表项会被放到就绪列表。
· 在创建任务以后,新创建的任务在未开启调度器之前是被添加到就绪列表的,在源代码中找到如下:
#define prvAddTaskToReadyList( pxTCB ) \traceMOVED_TASK_TO_READY_STATE( pxTCB ); \taskRECORD_READY_PRIORITY( ( pxTCB )->uxPriority ); \listINSERT_END( &( pxReadyTasksLists[ ( pxTCB )->uxPriority ] ), &( ( pxTCB )->xStateListItem ) ); \tracePOST_MOVED_TASK_TO_READY_STATE( pxTCB )
其中 listINSERT_END( &( pxReadyTasksLists[ ( pxTCB )->uxPriority ] ), &( ( pxTCB )->xStateListItem ) ); 代表将 pxTCB ->xStateListItem 指向pxReadyTasksLists 的 pxTCB ->uxPriority 的列表的位置。函数实现如下:
#define listINSERT_END( pxList, pxNewListItem ) \{ \ListItem_t * const pxIndex = ( pxList )->pxIndex; \\/* Only effective when configASSERT() is also defined, these tests may catch \* the list data structures being overwritten in memory. They will not catch \* data errors caused by incorrect configuration or use of FreeRTOS. */ \listTEST_LIST_INTEGRITY( ( pxList ) ); \listTEST_LIST_ITEM_INTEGRITY( ( pxNewListItem ) ); \\/* Insert a new list item into ( pxList ), but rather than sort the list, \* makes the new list item the last item to be removed by a call to \* listGET_OWNER_OF_NEXT_ENTRY(). */ \( pxNewListItem )->pxNext = pxIndex; \( pxNewListItem )->pxPrevious = pxIndex->pxPrevious; \\pxIndex->pxPrevious->pxNext = ( pxNewListItem ); \pxIndex->pxPrevious = ( pxNewListItem ); \\/* Remember which list the item is in. */ \( pxNewListItem )->pxContainer = ( pxList ); \\( ( pxList )->uxNumberOfItems )++; \}
其中,pxReadyTasksLists是一个全局变量,原型如下:
PRIVILEGED_DATA static List_t pxReadyTasksLists[ configMAX_PRIORITIES ]; /*< Prioritised ready tasks. */它的成员数量就是我们设置的RTOS支持的最大优先级(使用计算前导零指令的值应该不超过32)。从0到configMAX_PRIORITIES - 1 储存着0到configMAX_PRIORITIES - 1的优先级的列表。同时搭配 uxTopReadyPriority 可以快速定位到最高优先级的那个队列。uxTopReadyPriority是一个32位无符号整数,如果使用计算前导零指令,则不能将configMAX_PRIORITIES设置的大于32,的原因就在于此。(计算前导零指令是用来计算一个数在二进制的条件下,从最高位向最低位数起,连续0的个数,例如 0000 1011 1111 1111 0000 1111 1111 0000最后计算出的值就是4)。
2.阻塞列表
当任务遇到阻塞状态,如延时,等待某一个事件的时候,任务会被插入到阻塞列表
3.挂起列表
当任务被vTsakSuspend挂起时,会被添加到挂起列表
4.事件列表
当任务处于某个等待事件的时候,会被添加到该列表
其中,任务的TCB中只包含时间列表和状态列表(就绪,挂起,阻塞),这样做可以减少空间的占用,同时任务也不可能同时处于就绪,挂起,阻塞这几种状态。
三、任务调度的决策者
处于就绪列表中的任务要进行调度,那就肯定要有一个调度的时机,多久调度一次,调度哪一个任务都有讲究。
FreeRTOS中,任务调度由两个中断完成,系统滴答定时器中断,和PendSV中断。
系统滴答定时器中断负责处理调度的时机和给系统提供时基,PendSV中断则负责处理切换的上下文。
1.系统滴答定时器中断
void xPortSysTickHandler( void )
{/* The SysTick runs at the lowest interrupt priority, so when this interrupt* executes all interrupts must be unmasked. There is therefore no need to* save and then restore the interrupt mask value as its value is already* known - therefore the slightly faster vPortRaiseBASEPRI() function is used* in place of portSET_INTERRUPT_MASK_FROM_ISR(). */vPortRaiseBASEPRI();{/* Increment the RTOS tick. */if( xTaskIncrementTick() != pdFALSE ){/* A context switch is required. Context switching is performed in* the PendSV interrupt. Pend the PendSV interrupt. */portNVIC_INT_CTRL_REG = portNVIC_PENDSVSET_BIT;}}vPortClearBASEPRIFromISR();
}
xTaskIncrementTick的原型如下:
BaseType_t xTaskIncrementTick( void )
{TCB_t * pxTCB;TickType_t xItemValue;BaseType_t xSwitchRequired = pdFALSE;/* Called by the portable layer each time a tick interrupt occurs.* Increments the tick then checks to see if the new tick value will cause any* tasks to be unblocked. */traceTASK_INCREMENT_TICK( xTickCount );if( uxSchedulerSuspended == ( UBaseType_t ) pdFALSE ){/* Minor optimisation. The tick count cannot change in this* block. */const TickType_t xConstTickCount = xTickCount + ( TickType_t ) 1;/* Increment the RTOS tick, switching the delayed and overflowed* delayed lists if it wraps to 0. */xTickCount = xConstTickCount;if( xConstTickCount == ( TickType_t ) 0U ) /*lint !e774 'if' does not always evaluate to false as it is looking for an overflow. */{taskSWITCH_DELAYED_LISTS();}else{mtCOVERAGE_TEST_MARKER();}/* See if this tick has made a timeout expire. Tasks are stored in* the queue in the order of their wake time - meaning once one task* has been found whose block time has not expired there is no need to* look any further down the list. */if( xConstTickCount >= xNextTaskUnblockTime ){for( ; ; ){if( listLIST_IS_EMPTY( pxDelayedTaskList ) != pdFALSE ){/* The delayed list is empty. Set xNextTaskUnblockTime* to the maximum possible value so it is extremely* unlikely that the* if( xTickCount >= xNextTaskUnblockTime ) test will pass* next time through. */xNextTaskUnblockTime = portMAX_DELAY; /*lint !e961 MISRA exception as the casts are only redundant for some ports. */break;}else{/* The delayed list is not empty, get the value of the* item at the head of the delayed list. This is the time* at which the task at the head of the delayed list must* be removed from the Blocked state. */pxTCB = listGET_OWNER_OF_HEAD_ENTRY( pxDelayedTaskList ); /*lint !e9079 void * is used as this macro is used with timers and co-routines too. Alignment is known to be fine as the type of the pointer stored and retrieved is the same. */xItemValue = listGET_LIST_ITEM_VALUE( &( pxTCB->xStateListItem ) );if( xConstTickCount < xItemValue ){/* It is not time to unblock this item yet, but the* item value is the time at which the task at the head* of the blocked list must be removed from the Blocked* state - so record the item value in* xNextTaskUnblockTime. */xNextTaskUnblockTime = xItemValue;break; /*lint !e9011 Code structure here is deemed easier to understand with multiple breaks. */}else{mtCOVERAGE_TEST_MARKER();}/* It is time to remove the item from the Blocked state. */listREMOVE_ITEM( &( pxTCB->xStateListItem ) );/* Is the task waiting on an event also? If so remove* it from the event list. */if( listLIST_ITEM_CONTAINER( &( pxTCB->xEventListItem ) ) != NULL ){listREMOVE_ITEM( &( pxTCB->xEventListItem ) );}else{mtCOVERAGE_TEST_MARKER();}/* Place the unblocked task into the appropriate ready* list. */prvAddTaskToReadyList( pxTCB );/* A task being unblocked cannot cause an immediate* context switch if preemption is turned off. */#if ( configUSE_PREEMPTION == 1 ){/* Preemption is on, but a context switch should* only be performed if the unblocked task's* priority is higher than the currently executing* task.* The case of equal priority tasks sharing* processing time (which happens when both* preemption and time slicing are on) is* handled below.*/if( pxTCB->uxPriority > pxCurrentTCB->uxPriority ){xSwitchRequired = pdTRUE;}else{mtCOVERAGE_TEST_MARKER();}}#endif /* configUSE_PREEMPTION */}}}/* Tasks of equal priority to the currently running task will share* processing time (time slice) if preemption is on, and the application* writer has not explicitly turned time slicing off. */#if ( ( configUSE_PREEMPTION == 1 ) && ( configUSE_TIME_SLICING == 1 ) ){if( listCURRENT_LIST_LENGTH( &( pxReadyTasksLists[ pxCurrentTCB->uxPriority ] ) ) > ( UBaseType_t ) 1 ){xSwitchRequired = pdTRUE;}else{mtCOVERAGE_TEST_MARKER();}}#endif /* ( ( configUSE_PREEMPTION == 1 ) && ( configUSE_TIME_SLICING == 1 ) ) */#if ( configUSE_TICK_HOOK == 1 ){/* Guard against the tick hook being called when the pended tick* count is being unwound (when the scheduler is being unlocked). */if( xPendedTicks == ( TickType_t ) 0 ){vApplicationTickHook();}else{mtCOVERAGE_TEST_MARKER();}}#endif /* configUSE_TICK_HOOK */#if ( configUSE_PREEMPTION == 1 ){if( xYieldPending != pdFALSE ){xSwitchRequired = pdTRUE;}else{mtCOVERAGE_TEST_MARKER();}}#endif /* configUSE_PREEMPTION */}else{++xPendedTicks;/* The tick hook gets called at regular intervals, even if the* scheduler is locked. */#if ( configUSE_TICK_HOOK == 1 ){vApplicationTickHook();}#endif}return xSwitchRequired;
}
大致做了以下几个步骤:
1.在任务调度器未被挂起的条件下更新时基。若发生溢出,则调换溢出阻塞列表和阻塞列表(这种机制完美解决了溢出以后任务调度的问题)。
2.如果当前时基大于等于下一个任务的阻塞到期时间,那么就要进行任务切换。
a.查看阻塞列表是否为空,为空则退出。
b.得到当前阻塞列表的表头列表项,并得到他的阻塞时间到期的值,如果当前的时基值小于它,那么久更新下一个任务的阻塞到期时间为表头列表项的时间并退出。
c.倘若以上都未退出,则证明这个任务阻塞到期,将他从阻塞列表中移除,倘若该列表正在等待事件,则从事件列表中移除,最后插入到就绪列表。
d.倘若插入的任务列表优先级大于当前的任务优先级,那么将返回值设置为pdTRUE(使能抢占式调度)
3.如果就绪列表不为空,那么将返回值设为pdTRUE
4.如果xYieldPending不为pdFALSE(延时任务切换)那么设定返回值为pdTRUE
当返回值为pdTRUE的时候则会执行 “portNVIC_INT_CTRL_REG = portNVIC_PENDSVSET_BIT;”挂起PendSV中断,执行任务切换。
总的来说就是当出现任务阻塞时间到期,或者使能时间片调度,或者xYieldPending 为pdTRUE就会触发任务切换。
2.PendSV中断
PendSV中断中采用汇编代码编写,对于了解任务调度来书,知道他做了什么即可:
__asm void xPortPendSVHandler( void )
{extern uxCriticalNesting;extern pxCurrentTCB;extern vTaskSwitchContext;/* *INDENT-OFF* */PRESERVE8mrs r0, pspisbldr r3, =pxCurrentTCB /* Get the location of the current TCB. */ldr r2, [ r3 ]stmdb r0 !, { r4 - r11 } /* Save the remaining registers. */str r0, [ r2 ] /* Save the new top of stack into the first member of the TCB. */stmdb sp !, { r3, r14 }mov r0, #configMAX_SYSCALL_INTERRUPT_PRIORITYmsr basepri, r0dsbisbbl vTaskSwitchContextmov r0, #0msr basepri, r0ldmia sp !, { r3, r14 }ldr r1, [ r3 ]ldr r0, [ r1 ] /* The first item in pxCurrentTCB is the task top of stack. */ldmia r0 !, { r4 - r11 } /* Pop the registers and the critical nesting count. */msr psp, r0isbbx r14nop
/* *INDENT-ON* */
}
代码主要分两部分:
1.保存当前任务上下文
2.恢复调度的任务上下文
由于CortexM3内核寄存器的R4到R11是需要手动保存的,所以也在代码中体现出来
mrs r0, pspisbldr r3, =pxCurrentTCB /* Get the location of the current TCB. */ldr r2, [ r3 ]stmdb r0 !, { r4 - r11 } /* Save the remaining registers. */str r0, [ r2 ] /* Save the new top of stack into the first member of the TCB. */表示保存当前任务上下文
mrs r0, psp 获取栈顶指针到r0ldr r3, =pxCurrentTCB 获取当前任务控制块的地址(二级指针)到r3ldr r2, [ r3 ] 得到当前任务控制块到r2(一级指针)stmdb r0 !, { r4 - r11 } 依次将r0到r11的数据入栈,并更新r0str r0, [ r2 ] 将新的栈顶指针赋值给r2,即TCB中的volatile StackType_t * pxTopOfStack 成员。 stmdb sp !, { r3, r14 }mov r0, #configMAX_SYSCALL_INTERRUPT_PRIORITYmsr basepri, r0dsbisbbl vTaskSwitchContextmov r0, #0msr basepri, r0ldmia sp !, { r3, r14 }ldr r1, [ r3 ]ldr r0, [ r1 ] /* The first item in pxCurrentTCB is the task top of stack. */ldmia r0 !, { r4 - r11 } /* Pop the registers and the critical nesting count. */msr psp, r0isbbx r14
表示恢复任务上下文
stmdb sp !, { r3, r14 } 保存r3,r14的值到栈mov r0, #configMAX_SYSCALL_INTERRUPT_PRIORITY
msr basepri, r0 关中断dsb
isb 确保操作已经完成bl vTaskSwitchContext 选择下一个任务mov r0, #0
msr basepri, r0 开中断ldmia sp !, { r3, r14 } 从栈中恢复r3,r14ldr r1, [ r3 ] pxCurrentTCB的地址给r1(pxCurrentTCB在vTaskSwitchContext 函数被改变)
ldr r0, [ r1 ] pxCurrentTCB给r0 此时r0为volatile StackType_t * pxTopOfStack ldmia r0 !, { r4 - r11 } 将r0的值出栈到r4到r11,即任务的恢复msr psp, r0 将r0的值给psp,恢复栈顶指针bx r14 退出在此期间,vTaskSwitchContext为寻找下一个任务,函数原型如下:
void vTaskSwitchContext( void )
{if( uxSchedulerSuspended != ( UBaseType_t ) pdFALSE ){/* The scheduler is currently suspended - do not allow a context* switch. */xYieldPending = pdTRUE;}else{xYieldPending = pdFALSE;traceTASK_SWITCHED_OUT();#if ( configGENERATE_RUN_TIME_STATS == 1 ){#ifdef portALT_GET_RUN_TIME_COUNTER_VALUEportALT_GET_RUN_TIME_COUNTER_VALUE( ulTotalRunTime );#elseulTotalRunTime = portGET_RUN_TIME_COUNTER_VALUE();#endif/* Add the amount of time the task has been running to the* accumulated time so far. The time the task started running was* stored in ulTaskSwitchedInTime. Note that there is no overflow* protection here so count values are only valid until the timer* overflows. The guard against negative values is to protect* against suspect run time stat counter implementations - which* are provided by the application, not the kernel. */if( ulTotalRunTime > ulTaskSwitchedInTime ){pxCurrentTCB->ulRunTimeCounter += ( ulTotalRunTime - ulTaskSwitchedInTime );}else{mtCOVERAGE_TEST_MARKER();}ulTaskSwitchedInTime = ulTotalRunTime;}#endif /* configGENERATE_RUN_TIME_STATS *//* Check for stack overflow, if configured. */taskCHECK_FOR_STACK_OVERFLOW();/* Before the currently running task is switched out, save its errno. */#if ( configUSE_POSIX_ERRNO == 1 ){pxCurrentTCB->iTaskErrno = FreeRTOS_errno;}#endif/* Select a new task to run using either the generic C or port* optimised asm code. */taskSELECT_HIGHEST_PRIORITY_TASK(); /*lint !e9079 void * is used as this macro is used with timers and co-routines too. Alignment is known to be fine as the type of the pointer stored and retrieved is the same. */traceTASK_SWITCHED_IN();/* After the new task is switched in, update the global errno. */#if ( configUSE_POSIX_ERRNO == 1 ){FreeRTOS_errno = pxCurrentTCB->iTaskErrno;}#endif#if ( ( configUSE_NEWLIB_REENTRANT == 1 ) || ( configUSE_C_RUNTIME_TLS_SUPPORT == 1 ) ){/* Switch C-Runtime's TLS Block to point to the TLS* Block specific to this task. */configSET_TLS_BLOCK( pxCurrentTCB->xTLSBlock );}#endif}
}
但是关键在于函数“taskSELECT_HIGHEST_PRIORITY_TASK()”,其他都是预编译条件决定。taskSELECT_HIGHEST_PRIORITY_TASK的原型如下:
#define taskSELECT_HIGHEST_PRIORITY_TASK() \{ \UBaseType_t uxTopPriority; \\/* Find the highest priority list that contains ready tasks. */ \portGET_HIGHEST_PRIORITY( uxTopPriority, uxTopReadyPriority ); \configASSERT( listCURRENT_LIST_LENGTH( &( pxReadyTasksLists[ uxTopPriority ] ) ) > 0 ); \listGET_OWNER_OF_NEXT_ENTRY( pxCurrentTCB, &( pxReadyTasksLists[ uxTopPriority ] ) ); \} /* taskSELECT_HIGHEST_PRIORITY_TASK() */
portGET_HIGHEST_PRIORITY表示得到当前的最高优先级,通过特殊算法或者计算前导零指令实现。
listGET_OWNER_OF_NEXT_ENTRY表示获取下一个列表的拥有者,原型如下:
#define listGET_OWNER_OF_NEXT_ENTRY( pxTCB, pxList ) \{ \List_t * const pxConstList = ( pxList ); \/* Increment the index to the next item and return the item, ensuring */ \/* we don't return the marker used at the end of the list. */ \( pxConstList )->pxIndex = ( pxConstList )->pxIndex->pxNext; \if( ( void * ) ( pxConstList )->pxIndex == ( void * ) &( ( pxConstList )->xListEnd ) ) \{ \( pxConstList )->pxIndex = ( pxConstList )->pxIndex->pxNext; \} \( pxTCB ) = ( pxConstList )->pxIndex->pvOwner; \}
以上代码用一句话来说,就是将pxCurrentTCB 指向pxReadyTasksLists(就绪列表)中优先级最高的那一个任务控制块。因为pxCurrentTCB是一个任务控制块的一级指针,定义如下:
portDONT_DISCARD PRIVILEGED_DATA TCB_t * volatile pxCurrentTCB = NULL;因此PendSV函数可以通过操作pxCurrentTCB以及寄存器,来间接保存和恢复任务上下文。
值得注意的是,就绪列表是按照如下方式组成的:
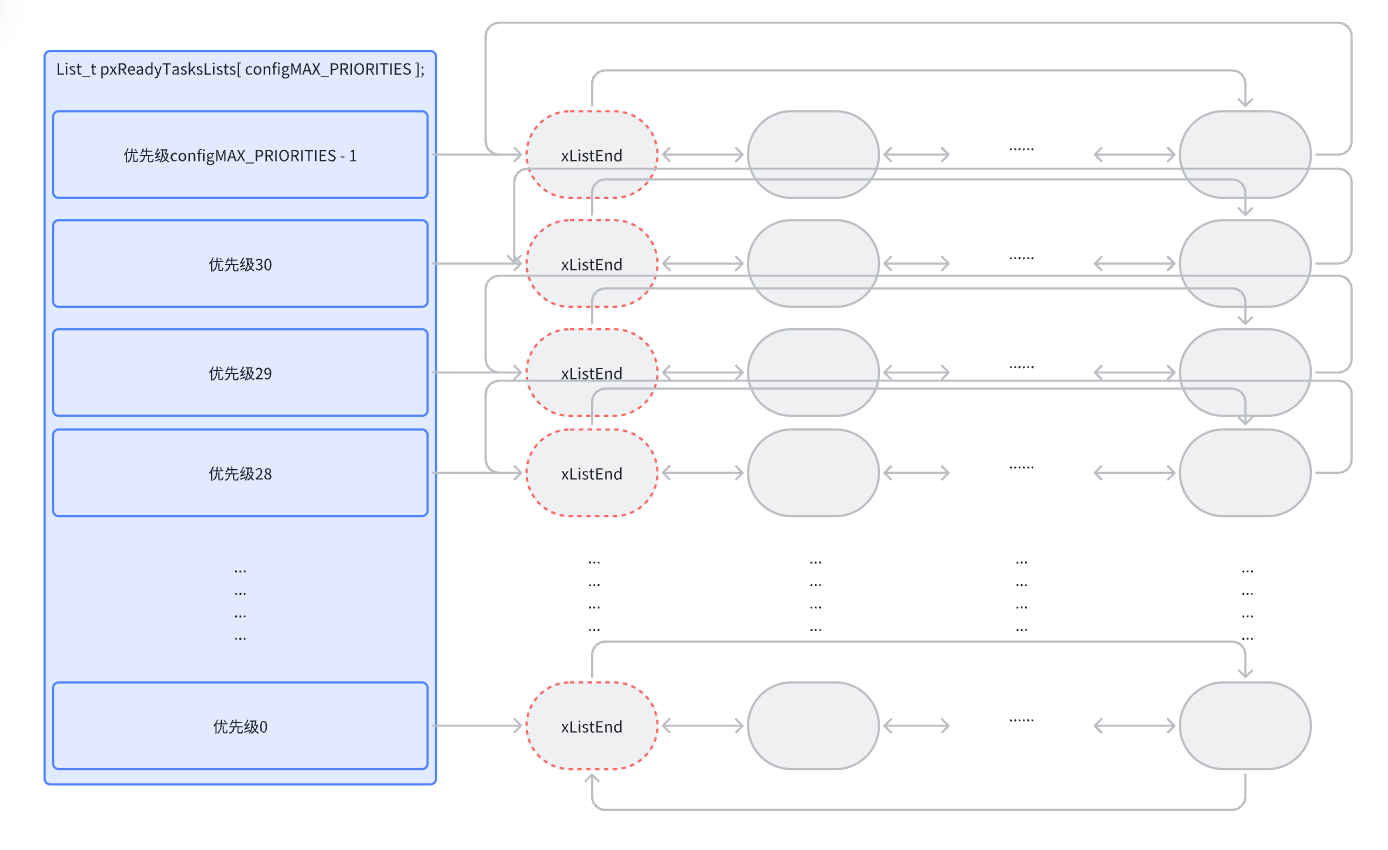
因此在这里也解答了问什么通过计算前导零指令可以快速获得就绪列表中最高优先级的任务了。
相关文章:

FreeRTOS “探究任务调度机制魅力”
引入 现如今随着单片机的资源越来越多,主频越来越高,在面临更复杂的功能实现以及对MCU性能的充分压榨,会RTOS已经成为一个必要的技能,新手刚开始学习的时候就很好奇“为什么代码可以放到两个循环里同时运行?”。接下来…...

BGP策略实验练习
要求: 1、使用PreVal策略,确保R4通过R2到达192.168.10.0/24 2、使用AS_Path策略,确保R4通过R3到达192.168.11.0/24 3、配置MED策略,确保R4到达R3到达192.168.11.0/24 4、使用Local Preference策略,确保R1通过R2到达192…...

Office 中 VBE 的共同特点与区别
1. Excel VBE 核心对象 #mermaid-svg-IklDO11Hu656bdGS {font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:16px;fill:#333;}#mermaid-svg-IklDO11Hu656bdGS .error-icon{fill:#552222;}#mermaid-svg-IklDO11Hu656bdGS .error-text{fill:#552222;stro…...
)
Linux虚拟文件系统(1)
1 虚拟文件系统(VFS) 虚拟文件系统(Virtual File System, VFS)作为内核的子系统。,它为用户空间的应用程序提供了一个统一的文件系统接口。通过VFS,不同的文件系统可以共存于同一个操作系统中,…...

目标检测评估指标mAP详解:原理与代码
目标检测评估指标mAP详解:原理与代码 目标检测评估指标mAP详解:原理与代码一、前言:为什么需要mAP?二、核心概念解析2.1 PR曲线(Precision-Recall Curve)2.2 AP计算原理 三、代码实现详解3.1 核心函数ap_pe…...
)
Linux干货(六)
前言 从B站黑马程序员Linux课程摘选的学习干货,新手友好!若有侵权,会第一时间处理。 目录 前言 1.环境变量 1.环境变量的定义 2.env命令的作用 3.$符号的作用 4.PATH的定义和作用 5.修改环境变量的方法 1.临时生效 2.永久生效 2.…...
)
字符串相乘(43)
43. 字符串相乘 - 力扣(LeetCode) 解法: class Solution { public:string multiply(string num1, string num2) {string res "0";for (int i 0; i < num2.size(); i) {string str multiplyOneNum(num1, num2[num2.size() -…...

【Vue篇】数据秘语:从watch源码看响应式宇宙的蝴蝶效应
目录 引言 一、watch侦听器(监视器) 1.作用: 2.语法: 3.侦听器代码准备 4. 配置项 5.总结 二、翻译案例-代码实现 1.需求 2.代码实现 三、综合案例——购物车案例 1. 需求 2. 代码 引言 💬 欢迎讨论&#…...
lcd屏显示文字与照片)
esp32课设记录(二)lcd屏显示文字与照片
取模软件链接: 链接: 百度网盘 请输入提取码 提取码: 1234 课设要求如图所示,因此需要在esp32显示文字和照片。在上个文章中我已经写了按键相关内容。这篇主要描述怎么显示文字和照片。我使用的是ESP-IDF库。 本项目使用的是基于ST7789驱动芯片的LCD屏幕…...

Open CASCADE学习|几何体切片处理:OpenMP与OSD_Parallel并行方案深度解析
在三维建模与仿真领域,几何体切片处理是CAE前处理、3D打印路径规划、医学影像分析等场景的关键技术。其核心目标是将三维模型沿特定方向离散为二维截面集合,便于后续分析或制造。OpenCASCADE作为开源几何内核,提供高效的布尔运算与几何算法&a…...
)
【Android】从Choreographer到UI渲染(二)
【Android】从Choreographer到UI渲染(二) Google 在 2012 年推出的 Project Butter(黄油计划)是 Android 系统发展史上的重要里程碑,旨在解决长期存在的 UI 卡顿、响应延迟等问题,提升用户体验。 在 Androi…...
)
板凳-------Mysql cookbook学习 (三)
1.22 使长输出行更具可读性 mysql> show full columns from limbs; ------------------------------------------------------------------------------------------------------------- | Field | Type | Collation | Null | Key | Default | Extra | Pri…...

济南国网数字化培训班学习笔记-第三组-2-电力通信光缆网认知
电力通信光缆网认知 光缆网架构现状 基础底座 电路系统是高度复杂,实时性、安全性、可靠性要求极高的巨系统,必须建设专用通信网 相伴相生 电力系统是由发电、输电、变电、配电、用电等一次设施,及保障其正常运行的保护、自动化、通信等…...

黑灰产业链深度解析
黑灰产业链深度解析 大家好,欢迎来到「黑产档案」。本频道专注于反诈教育宣传,通过深度拆解黑灰产业链的运作逻辑,帮助公众识别骗局、规避风险。本节课将聚焦产业链的核心环节,揭示其背后的灰色生态。 一、黑灰产的定义与范畴 要…...

golang选项设计模式
选项设计模式 有时候一个函数会有很多参数,为了方便函数的使用,我们会给希望给一些参数设定默认值,调用时只需要传与默认值不同的参数即可,类似于 python 里面的默认参数和字典参数,虽然 golang 里面既没有默认参数也…...

方案精读:104页DeepSeek金融银行核算流程场景部署建设方案【附全文阅读】
DeepSeek,金融银行核算流程的革新方案! 这份方案专为金融银行从业者打造,旨在解决传统核算流程的难题。当下,金融银行核算面临效率低、错误率高、合规压力大等挑战,DeepSeek 方案正是应对之策。 该方案运用人工智能和大数据技术,实现数据采集、清洗自动化,智能核算对账,…...

【MySQL】02.数据库基础
1. 数据库的引入 之前存储数据用文件就可以了,为什么还要弄个数据库? 文件存储存在安全性问题,文件不利于数据查询和管理,文件不利于存储海量数据,文件在程序中控制不方便。而为了解决上述问题,专家们设计出更加利于…...

STM32项目实战:ADC采集
STM32F103C8T6的ADC配置。PB0对应的是ADC1的通道8。在标准库中,需要初始化ADC,设置通道,时钟,转换模式等。需要配置GPIOB的第0脚为模拟输入模式,然后配置ADC1的通道8,设置转换周期和触发方式。 接下来是I2C…...

《AI语音模型:MiniMax Speech-02》
开场:AI 语音界的震撼弹 在 AI 语音技术的激烈竞争赛道上,MiniMax Speech - 02 的出现宛如一颗震撼弹,瞬间引爆了整个行业。不久前,一则消息在全球 AI 领域引起轩然大波:MiniMax 的新一代语音大模型 Speech - 02&#…...

基于LabVIEW的双音多频系统设计
目录 1 系统设计概述 双音多频(Dual-Tone Multi-Frequency, DTMF)信号是一种广泛应用于电话系统中的音频信号,通过不同的频率组合表示不同的按键。每个按键对应两个频率,一个低频和一个高频,共同组成独特的信号。在虚拟仪器技术快速发展的背景下,利用LabVIEW等图形化编程…...

快速生成角色背景设定:基于Next.js的AI辅助工具开发实践
引言 在游戏开发、小说创作和角色扮演(RP)中,角色背景设定(Headcanon)的构建往往耗时耗力。传统方法依赖手动编写,容易陷入思维定式。本文将分享如何利用Next.js和Tailwind CSS开发一个高效的AI角色设定生…...

轻量级视频剪辑方案:FFmpeg图形化工具体验
FFmpeg小白助手是基于开源FFmpeg开发的本地化视频处理软件,采用绿色免安装设计,解压后即可直接运行。该工具主要面向普通用户的日常音视频处理需求,通过简洁的图形界面降低了FFmpeg的使用门槛。 功能特性 基础编辑功能 格式转换:…...

主成分分析的应用之sklearn.decomposition模块的PCA函数
主成分分析的应用之sklearn.decomposition模块的PCA函数 一、模型建立整体步骤 二、数据 2297.86 589.62 474.74 164.19 290.91 626.21 295.20 199.03 2262.19 571.69 461.25 185.90 337.83 604.78 354.66 198.96 2303.29 589.99 516.21 236.55 403.92 730.05 438.41 225.80 …...

Java基于数组的阻塞队列实现详解
在多线程编程中,阻塞队列是一种非常有用的工具,它可以在生产者和消费者之间提供一个缓冲区,使得生产者可以往队列中添加数据,而消费者可以从队列中取出数据。当队列满时,生产者会被阻塞直到有空间可用;当队…...

ngx_http_random_index_module 模块概述
一、使用场景 随机内容分发 当同一目录下存放多份等价内容(如多张轮播图、不同版本静态页面等)时,可通过随机索引实现负载均衡或流量分散。A/B 测试 通过目录请求自动随机分配用户到不同测试组,无需后端逻辑参与。动态“首页”选…...

你引入的lodash充分利用了吗?
#开发中,发现自己只有cloneDeep的时候才想起来用这个库的便利,搜索了项目内代码,发现大家基本也是这样,其实我们错过了很多好东西# cloneDeep 深拷贝 var objects [{ a: 1 }, { b: 2 }];var deep _.cloneDeep(objects); conso…...

Python爬虫基础
本篇内容中,我们主要分享一些爬虫的前置知识,主要知识点有: 爬虫的概念和作用爬虫的流程【重要】http相关的复习 http和https概念和区别浏览器访问一个网址的过程爬虫中常用的请求头、响应头常见的响应状态码 浏览器自带开发者工具的使用 爬…...

飞帆控件:on_post_get 接口配置
在网页中写一个接口是很基础的要求。 今天我们介绍一个工具,不用写代码,配置即可。 先上链接: on_post_gethttps://fvi.cn/798来看看控件的配置: 使用这个控件,在网页中写 post/get 接口可以告别代码。或许能做到初…...
:)
C++笔试题(金山科技新未来训练营):
题目分布: 17道单选(每题3分)3道多选题(全对3分,部分对1分)2道编程题(每一道20分)。 不过题目太多,就记得一部分了: 单选题: static变量的初始…...
)
Selenium-Java版(css表达式)
css表达式 前言 根据 tag名、id、class 选择元素 tag名 #id .class 选择子元素和后代元素 定义 语法 根据属性选择 验证CSS Selector 组选择 按次序选择子节点 父元素的第n个子节点 父元素的倒数第n个子节点 父元素的第几个某类型的子节点 父元素的…...

19. 结合Selenium和YAML对页面实例化PO对象改造
19. 结合Selenium和YAML对页面实例化PO对象改造 一、架构升级核心思路 1.1 改造核心目标 # 原始PO模式:显式定义元素定位 username (id, ctl00_MainContent_username)# 改造后PO模式:动态属性访问 self.username.send_keys(Tester) # 自动触发元素定…...

MySQL——5、基本查询
表的增删改查 1、Create1.1、单行数据全列插入1.2、多行数据指定列插入1.3、插入否则更新1.4、替换 2、Retrieve2.1、select列2.2、where条件2.3、结果排序2.4、筛选分页结果 3、Update4、Delete4.1、删除数据4.2、截断表 5、插入查询结果6、聚合函数7、group by子句的使用8、实…...

ngx_http_referer_module 模块概述
一、使用场景 防盗链 仅允许本站或特定域名的页面直接引用图片、视频等资源,拒绝第三方网站直接嵌入。流量控制 阻止来自社交媒体、搜索引擎或未知来源的大量自动化抓取。安全审计 简易记录并过滤可疑 Referer,以减少非法请求。 注意 Referer 头可被伪造…...

Go语言--语法基础5--基本数据类型--类型转换
Go 编程语言中 if 条件语句的语法如下: 1、基本形式 if 布尔表达式 { /* 在布尔表达式为 true 时执行 */ } If 在布尔表达式为 true 时,其后紧跟的语句块执行,如果为 false 则 不执行。 package main import "fmt" …...
)
用golang实现二叉搜索树(BST)
目录 一、概念、性质二、二叉搜索树的实现1. 结构2. 查找3. 插入4. 删除5. 中序遍历 中序前驱/后继结点 一、概念、性质 二叉搜索树(Binary Search Tree),简写BST,又称为二叉查找树 它满足: 空树是一颗二叉搜索树对…...

基于FPGA的电子万年历系统开发,包含各模块testbench
目录 1.课题概述 2.系统仿真结果 3.核心程序与模型 4.系统原理简介 5.完整工程文件 1.课题概述 基于FPGA的电子万年历系统开发,包含各模块testbench。主要包含以下核心模块: 时钟控制模块:提供系统基准时钟和计时功能。 日历计算模块:…...

上位机知识篇---Web
文章目录 前言 前言 本文简单介绍了Web。...
)
2025 ISCC 练武赛Pwn-wp(含附件)
前言 去年个人赛报名了忘记打了(笑), 所以这应该算是我第一次参加ISCC, 体验也是非常非常非常非常的cha(第四声)!!! 主办方也是非常幽默,pwn和web都是公用容器,那web最后都被当成玩具玩坏了 下面是这次练武题的pwn所有附件 通过网盘分享的文件…...

LeetCode Hot100刷题——除自身以外数组的乘积
238. 除自身以外数组的乘积 给你一个整数数组 nums,返回 数组 answer ,其中 answer[i] 等于 nums 中除 nums[i] 之外其余各元素的乘积 。 题目数据 保证 数组 nums之中任意元素的全部前缀元素和后缀的乘积都在 32 位 整数范围内。 请 不要使用除法&a…...
)
IDEA - Windows IDEA 代码块展开与折叠(基础折叠操作、高级折叠操作)
一、基础折叠操作 折叠当前代码块:Ctrl - # 操作方式按下 【Ctrl】 键,再按下 【-】 键展开当前代码块:Ctrl # 操作方式按下 【Ctrl】 键,再按下 【】 键折叠所有代码块:Ctrl Shift - # 操作方式按下 【Ctrl】…...

javaSE.Map
Map存储映射关系。键值对。key-value 左边值映射着右边的值,左边相当于钥匙,开到右边的门获取得到信息。 get👇put 是否存在该key👇containsKey() map.values👇 entrySet👇 entrySet()获取map中所有的键…...

Python Requests库完全指南:从入门到精通
引言 在Python的生态系统中,requests库以其简洁优雅的API设计和强大的功能,成为HTTP请求处理领域的标杆工具。无论是数据爬虫开发、API接口调用,还是自动化测试场景,requests都能将复杂的网络交互简化为几行可读性极高的代码。相…...

1.QPushBotton 以及 对象树
目录 1. 创建第一个Qt程序 1.1 初始化设置 🍐 选择存储位置 🍊 Kit 🍋 类信息 🍌 项目管理 1.2 代码 🍉 main.cpp 🍇widget.h 🍓 widget.cpp 1.3 .pro文件 🍈 常见模块…...

GO语言语法---For循环、break、continue
文章目录 1. 基本for循环(类似其他语言的while)2. 经典for循环(初始化;条件;后续操作)3. 无限循环4. 使用break和continue5 . 带标签的循环(可用于break/continue指定循环)1、break带标签2、continue带标签…...
)
网络编程-select(二)
一、I/O多路复用 1、为什么要多路复用 之前开启多线程能实时接收数据,并且也不是一次性连接服务。但毕竟是一请求一连接,每有一个客户端向服务端发起请求,就会创建一个线程,当请求达到上千上万,就会创建上千上万的线…...

2025年PMP 学习十九 第12章 项目采购管理
2025年PMP 学习十九 第12章 项目采购管理 序号过程过程组1规划采购管理规划2实施采购执行3控制采购监控4合同管理- 文章目录 2025年PMP 学习十九 第12章 项目采购管理12 项目采购管理建立战略合作伙伴关系的意义:细化采购步骤 12.1 规划采购管理1. **定义与作用**2…...

10.11 LangGraph多角色Agent开发实战:生产级AI系统架构与性能优化全解析
LangGraph 项目:High-level API for Multi-actor Agents 关键词:LangGraph 多角色 Agent, 状态管理, 持久化机制, 工作流编排, 生产级 AI 系统 1. LangGraph 设计哲学与架构演进 LangGraph 是 LangChain 生态中首个面向 多角色协作 Agent 的高阶 API 框架,其核心设计思想可…...

计算机网络概要
⽹络相关基础知识 协议 两设备之间使⽤光电信号传输信息数据 要想传递不同信息 那么⼆者ᳵ就需要约定好的数据格式 层 封装 继承 多态是计算机的性质 它们⽀持了软硬件分层的实现 同层协议可以ᳵ接通信 同层协议ᳵ不直接通信 是各⾃调⽤下层提供的结构能⼒完成通信 分层…...

Visual Studio已更新为17.14+集成deepseek实现高效编程
01 Visual Studio 2022 v17.14。 此更新侧重于全面提供出色的开发人员体验,侧重于稳定性和安全性以及 AI 改进。 02 GPT-4o代码完成模式 我们非常高兴地宣布,新的 GPT-4o Copilot 代码完成模型现已在 Visual Studio 17.14 中为 GitHub Copilot 用户…...

axios的基本使用
1. Axios概述 Axios 是一个基于 Promise 的 HTTP 客户端库,专为浏览器和 Node.js 设计,用来发送AJAX请求。可以通过npm install -g axios安装axios库。Axios有以下特征: 跨平台兼容性:同一套代码可运行于浏览器和 Node.js。在浏…...