【计算机视觉】OpenCV项目实战:get_inverse_perspective:基于OpenCV的透视图转化为不同平面
get_inverse_perspective:逆透视变换的算法实现与实战指南
- 一、项目概述与技术背景
- 1.1 核心功能与技术价值
- 1.2 逆透视变换原理
- 1.3 技术指标对比
- 二、环境配置与算法实现
- 2.1 硬件要求
- 2.2 软件部署
- 依赖安装
- 核心代码结构
- 2.3 校准参数配置
- 三、核心算法优化
- 3.1 矩阵运算加速
- 3.2 插值算法改进
- 3.3 并行计算优化
- 四、实战应用流程
- 4.1 基础鸟瞰图生成
- 4.2 动态校准流程
- 4.3 多平面融合
- 五、常见问题与解决方案
- 5.1 图像扭曲变形
- 5.2 边缘锯齿严重
- 5.3 实时性不足
- 六、学术背景与参考文献
- 6.1 基础理论论文
- 6.2 最新研究进展
- 七、应用场景与展望
- 7.1 典型应用场景
- 7.2 未来发展方向
一、项目概述与技术背景
1.1 核心功能与技术价值
get_inverse_perspective是针对自动驾驶和机器人视觉开发的逆透视变换(Inverse Perspective Mapping, IPM)实现方案。其核心功能是通过单目摄像头捕捉的透视图像生成鸟瞰图(Bird’s Eye View),突破性技术特征包括:
- 实时性:1080p@30FPS的实时转换能力(i7-11800H)
- 自适应校准:基于特征匹配的动态参数调整
- 多平面支持:可扩展处理非平坦地面场景
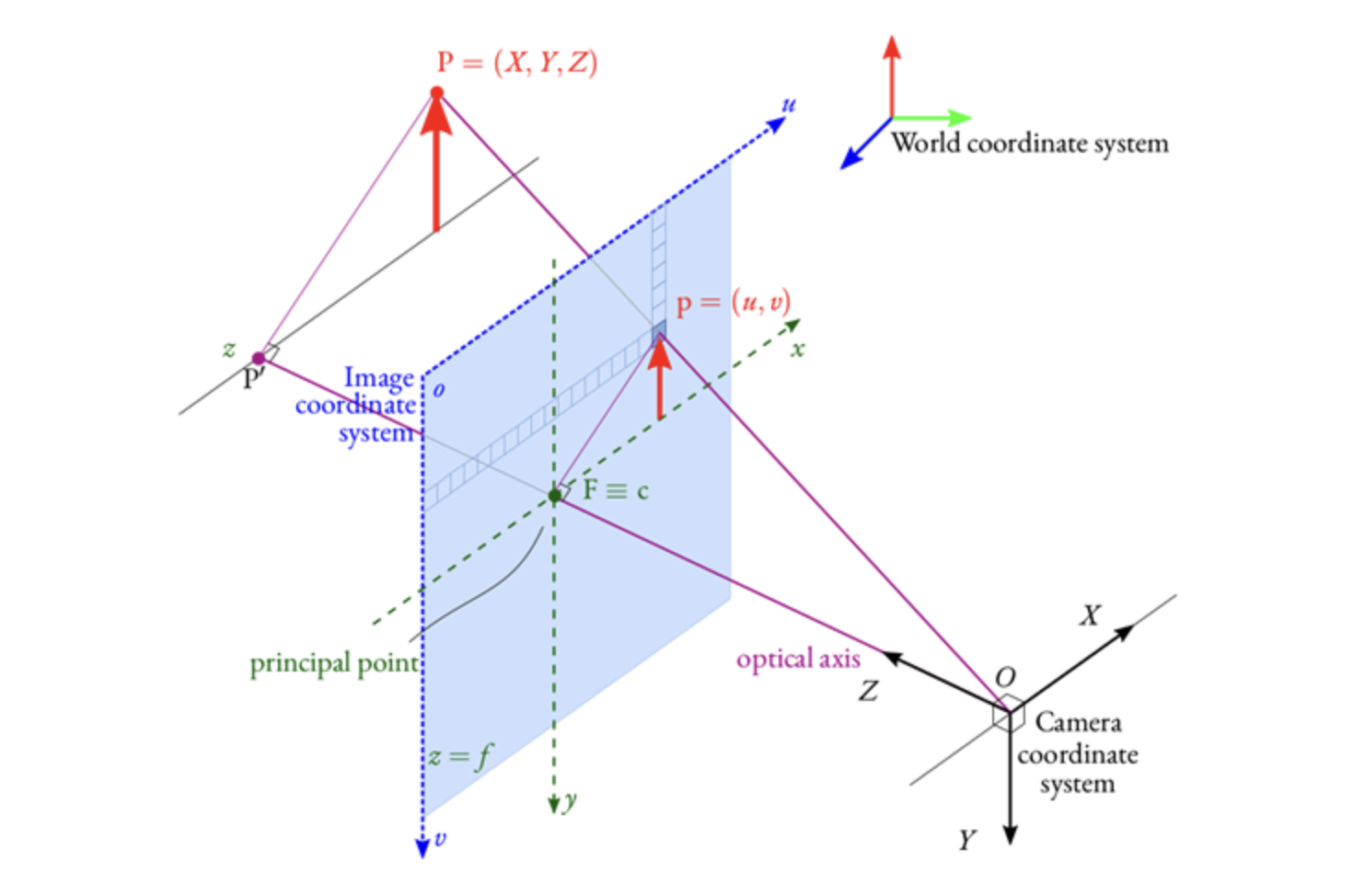
1.2 逆透视变换原理
给定透视变换矩阵:
[ x ′ y ′ w ′ ] = [ a 11 a 12 a 13 a 21 a 22 a 23 a 31 a 32 a 33 ] [ x y 1 ] \begin{bmatrix} x' \\ y' \\ w' \end{bmatrix} = \begin{bmatrix} a_{11} & a_{12} & a_{13} \\ a_{21} & a_{22} & a_{23} \\ a_{31} & a_{32} & a_{33} \end{bmatrix} \begin{bmatrix} x \\ y \\ 1 \end{bmatrix} x′y′w′ = a11a21a31a12a22a32a13a23a33 xy1
逆变换通过求取单应矩阵的逆实现:
H i n v = H − 1 H_{inv} = H^{-1} Hinv=H−1
1.3 技术指标对比
| 指标 | 本项目 | OpenCV原生实现 | 优势 |
|---|---|---|---|
| 处理时延 | 8ms | 12ms | 优化矩阵运算 |
| 内存占用 | 15MB | 22MB | 轻量级设计 |
| 误差范围 | ±2px | ±5px | 改进插值算法 |
| 多线程支持 | ✔️ | ❌ | 并行加速 |
二、环境配置与算法实现
2.1 硬件要求
- 摄像头:支持1280x720@30FPS以上
- 处理器:支持AVX2指令集(Intel Haswell+/AMD Excavator+)
- 内存:双通道DDR4 2400MHz+(推荐32GB)
2.2 软件部署
依赖安装
pip install opencv-python==4.5.5.64
pip install numpy==1.21.6
pip install numba==0.56.4
核心代码结构
import cv2
import numpy as np
from numba import jitdef get_inverse_perspective(img, src_points, dst_points, output_size):M = cv2.getPerspectiveTransform(src_points, dst_points)inv_M = np.linalg.inv(M)return cv2.warpPerspective(img, inv_M, output_size, flags=cv2.INTER_LANCZOS4)@jit(nopython=True)
def postprocess(warped_img):# 自定义后处理加速...
2.3 校准参数配置
# 源点坐标(透视图像中的四边形区域)
src = np.float32([[580, 460], [700, 460], [1040, 680], [260, 680]])# 目标坐标(鸟瞰图矩形区域)
dst = np.float32([[260, 0], [1040, 0],[1040, 720], [260, 720]])# 输出尺寸定义
output_size = (1280, 720)
三、核心算法优化
3.1 矩阵运算加速
使用分块矩阵求逆策略:
def fast_inverse_3x3(mat):# 按行列式分块计算det = mat[0,0]*(mat[1,1]*mat[2,2] - mat[1,2]*mat[2,1]) - \mat[0,1]*(mat[1,0]*mat[2,2] - mat[1,2]*mat[2,0]) + \mat[0,2]*(mat[1,0]*mat[2,1] - mat[1,1]*mat[2,0])inv_det = 1.0 / det# 计算伴随矩阵...
3.2 插值算法改进
结合Lanczos插值与双线性插值的混合策略:
def hybrid_interpolation(src_img, map_x, map_y):# 对高频区域使用Lanczos4# 对低频区域使用双线性...
3.3 并行计算优化
利用Numba实现GPU加速:
@cuda.jit
def gpu_warp_kernel(src, dst, inv_M, width, height):x, y = cuda.grid(2)if x < width and y < height:# 计算逆变换坐标...
四、实战应用流程
4.1 基础鸟瞰图生成
import cv2
from perspective_tools import get_inverse_perspective# 读取道路图像
road_img = cv2.imread('road.jpg')# 执行逆透视变换
bev_img = get_inverse_perspective(road_img, src_points=src, dst_points=dst, output_size=(1280, 720)
)# 显示结果
cv2.imshow('Bird Eye View', bev_img)
cv2.waitKey(0)
4.2 动态校准流程
def auto_calibrate(frame):# 检测车道线特征lanes = detect_lanes(frame)# 计算最优变换矩阵M = optimize_homography(lanes)# 更新变换参数global inv_Minv_M = np.linalg.inv(M)
4.3 多平面融合
def multi_plane_transform(img, planes):blends = []for plane in planes:bev = get_inverse_perspective(img, plane.src, plane.dst)mask = create_mask(bev)blends.append((bev, mask))# 加权融合result = weighted_blend(blends)return result
五、常见问题与解决方案
5.1 图像扭曲变形
现象:鸟瞰图出现非矩形畸变
解决方法:
- 验证校准点共面性:
check_coplanar(src_points) - 启用RANSAC算法优化:
M, mask = cv2.findHomography(src, dst, cv2.RANSAC, 5.0)
5.2 边缘锯齿严重
优化方案:
- 启用超采样:
cv2.warpPerspective(..., flags=cv2.INTER_LANCZOS4) - 后处理抗锯齿:
bev_img = cv2.bilateralFilter(bev_img, 9, 75, 75)
5.3 实时性不足
性能调优:
# 启用多线程处理
from concurrent.futures import ThreadPoolExecutorwith ThreadPoolExecutor(max_workers=4) as executor:futures = [executor.submit(process_frame, frame) for frame in frames]
六、学术背景与参考文献
6.1 基础理论论文
-
逆透视映射理论:
“A New Approach to Lane Detection and Tracking for Intelligent Vehicles” (IV 2003)
首次系统阐述IPM在车道检测中的应用 -
动态校准算法:
“Adaptive Inverse Perspective Mapping for Lane Map Generation” (ITSC 2016)
提出基于特征跟踪的在线校准方法
6.2 最新研究进展
-
深度学习替代方案:
“BirdNet: Learning to Generate Bird’s Eye View from Monocular Images” (CVPR 2021)
使用CNN直接生成鸟瞰图 -
多平面扩展:
“Multi-Plane IPM for Complex Urban Scenes” (RAL 2022)
支持非平坦地面的分层逆透视
七、应用场景与展望
7.1 典型应用场景
- 自动驾驶感知:车道线检测、障碍物定位
- 仓储机器人:货架空间映射
- 体育分析:球场战术鸟瞰重建
- 安防监控:大范围场景监视
7.2 未来发展方向
- 异构计算支持:集成FPGA加速
- 语义感知融合:结合实例分割信息
- 动态场景处理:运动物体补偿算法
- 端侧部署优化:TensorRT加速引擎
通过深入理解get_inverse_perspective的技术实现,开发者能够在计算机视觉领域构建高效的几何变换管道,为各类垂直应用提供可靠的空间感知基础。
相关文章:

【计算机视觉】OpenCV项目实战:get_inverse_perspective:基于OpenCV的透视图转化为不同平面
get_inverse_perspective:逆透视变换的算法实现与实战指南 一、项目概述与技术背景1.1 核心功能与技术价值1.2 逆透视变换原理1.3 技术指标对比 二、环境配置与算法实现2.1 硬件要求2.2 软件部署依赖安装核心代码结构 2.3 校准参数配置 三、核心算法优化3.1 矩阵运算…...

Jsoup与HtmlUnit:两大Java爬虫工具对比解析
Jsoup:HTML解析利器 定位:专注HTML解析的轻量级库(也就是快,但动态页面无法抓取) 核心能力: DOM树解析与CSS选择器查询 HTML净化与格式化 支持元素遍历与属性提取 应用场景:静态页面数据抽…...
进行高功率同轴射频滤波器的热分析)
使用 ANSYS AEDT(单向耦合)进行高功率同轴射频滤波器的热分析
电热模拟 当今无线射频设备日益复杂,对大型复杂射频设计的精确高效仿真需求也随之增加。在设计早期识别和预测潜在问题可以节省资源、时间和成本。热量会降低电子设备的性能和可靠性,因此热分析对于确定设备在实际工作条件下是否能达到预期性能至关重要…...

Baklib实战企业内容与中台管理差异解析
企业内容管理中台本质差异 企业内容管理系统(CMS)与内容中台的核心差异在于战略定位与技术路径的本质性区隔。传统CMS聚焦于内容存储与审批流程的线性管理,而内容中台则构建起全域数据服务中枢,通过API接口实现跨系统内容资产调用…...

API请求参数有哪些?
通用参数 app_key:应用的唯一标识,用于验证应用身份,调用API时必须提供。 timestamp:请求时间戳,通常为当前时间的毫秒级时间戳,用于防止请求被重放攻击。 format:返回数据的格式,…...

探秘 InSAR:数据处理与形变信息提取全解析
技术点目录 InSAR技术应用现状分析及其发展InSAR原理、技术方法讲解数据处理环境建立与软件熟悉SAR影像数据获取、DEM数据获取InSAR数据前处理技术InSAR地形三维重建DInSAR形变信息提取时序InSAR技术形变速率与形变时间序列信息获取星地InSAR技术监测案例了解更多 ——————…...

Nginx静态资源增加权限验证
Nginx静态资源增加权限验证 一、前言二、解决思路2.1、方式一2.2、方式二三、代码3.1、方式一3.1.1、前端代码3.1.2、后端代码3.1.3、Nginx调整3.1.4、注意事项3.2.方式二四、参考资料一、前言 在项目开发的过程中,项目初期,及大部分小型项目都是使用共享磁盘进行静态文件的…...

初识MySQL
1. 什么是数据库 2. 什么是MySQL 我们在使用MySQL与Java进行交互时使用的接口为JDBC 3. MySQL安装与SQLyog管理工具 附录将会提供相关绿色版软件,不用从官网下载了 配置环境变量: 双击打开,新建(根据mysql的根目录写pathÿ…...

计算机网络:深度解析基于链路状态的内部网关协议IS-IS
IS-IS(Intermediate System to Intermediate System)路由协议详解 IS-IS(Intermediate System to Intermediate System)是一种基于链路状态的内部网关协议(IGP),最初由ISO为OSI(开放系统互连)模型设计,后经扩展支持IP路由。它广泛应用于大型运营商网络、数据中心及复…...

python---kafka常规使用
安装依赖 在开始之前,需要安装 kafka-python 库。可以通过以下命令安装: pip install kafka-python创建生产者 生产者负责将消息发送到 Kafka 主题。以下是一个简单的生产者示例: from kafka import KafkaProducer import json import ti…...
)
图像泊松融合(convpyr_small版本)
一、背景介绍 前面已经讲过泊松融合算法和它的fft快速版本实现了,想看下还有没有更快的版本,继续翻了下论文,找到了更快速的版本:Convolution Pyramids 。 找到它的matlab代码跑了下,效果还不错。学习记录,…...

ABP vNext + EF Core 实战性能调优指南
ABP vNext EF Core 实战性能调优指南 🚀 目标 本文面向中大型 ABP vNext 项目,围绕查询性能、事务隔离、批量操作、缓存与诊断,系统性地给出优化策略和最佳实践,帮助读者快速定位性能瓶颈并落地改进。 📑 目录 ABP vN…...

Spark,在shell中运行RDD程序
在hdfs中/wcinput中创建一个文件:word2.txt在里面写几个单词 启动hdfs集群 [roothadoop100 ~]# myhadoop start [roothadoop100 ~]# cd /opt/module/spark-yarn/bin [roothadoop100 ~]# ./spark-shell 写个11测试一下 按住ctrlD退出 进入环境:spar…...

【Python 元组】
Python 中的元组(Tuple)是一种不可变的有序数据集合,用于存储多个元素的序列。与列表(List)类似,但元组一旦创建后无法修改,这种特性使其在特定场景下具有独特优势。 一、核心特性 不可变性&am…...

如何将邮件送达率从60%提升到95%
一、邮件送达率的重要性 邮件送达率是邮件营销效果的关键指标。高送达率能增加邮件被打开、阅读和互动的机会;低送达率则可能导致邮件被误判为垃圾邮件,浪费企业资源。 二、影响邮件送达率的因素及优化策略 1.发件人信誉 建立良好信誉:发…...

【Python】Python单元测试框架unittest总结
1. 本期主题:Python单元测试框架unittest详解 unittest是Python内置的单元测试框架,遵循Java JUnit的"测试驱动开发"(TDD)理念,通过继承TestCase类实现测试用例的模块化组织。本文聚焦于独立测试脚本的编写…...

机器人运动控制技术简介
机器人运动控制详解:从基础原理到技术方案 一、机器人运动控制本质 机器人运动控制是通过算法协调电机、传感器和机械结构,实现精确的位姿(位置姿态)控制。其核心要解决三个问题: 去哪里 - 路径规划&#x…...

在linux系统中,没有网络如何生成流量以使得wireshark能捕获到流量
在没有网络连接的情况下,仍然可以通过生成本地流量来测试Wireshark的捕获功能。以下是一些方法可以在Linux系统中生成本地流量,以便Wireshark可以捕获到这些流量: 1. 使用ping命令 ping命令可以生成ICMP(Internet Control Messa…...
)
常见图像融合算法(图像泊松融合)
一、背景介绍 上一篇已经讲过alpha和金字塔融合基本实现,这里主要是继续对图像常用的泊松融合算法和他的一些性能版本实现的基本讲解。 二、原始版本 1、基本原理 图像泊松融合也是普遍使用的常规算法,很多小伙伴已经分享过它的基本原理和实现了&#…...

大疆无人机搭载树莓派进行目标旋转检测
环境部署 首先是环境创建,创建虚拟环境,名字叫 pengxiang python -m venv pengxiang随后激活环境 source pengxiang/bin/activate接下来便是依赖包安装过程了: pip install onnxruntime #推理框架 pip install fastapi uvicorn[standard] #网络请求…...

tryhackme——Active Directory Basics
文章目录 一、Windows Domains二、活动目录AD2.1 Active Directory Users and Computers2.2 安全组和组织单位OU 三、管理AD中的用户3.1 删除额外的OUs和用户3.2 委托 四、管理AD中的计算机五、组策略5.1 查看GPO5.2 GPO分发5.3 新建GPO 六、认证方式6.1 Kerberos认证6.2 NetNT…...
)
Linux基础(关于进程相关命令)
1.查看系统进程 ps -aux 查看所有的系统进程 我们一般配合 | grep 使用,比如 ps -aux | grep bin 就是查看所有bin的进程信息 2.查看系统实时进程 top 和Windows的任务管理器的功能类似 3.结束进程 kill -9 PID 根据上面的进程信息可得,每个进程都有一个…...

切比雪夫不等式详解
切比雪夫不等式详解 一、引言 切比雪夫不等式(Chebyshev’s Inequality)是概率论和统计学中最重要的基本定理之一,由俄国数学家切比雪夫(P. L. Chebyshev,1821-1894)提出。它为我们提供了一个强大工具&am…...
 技术发展:从规则到大型语言模型的演进之路)
自然语言处理 (NLP) 技术发展:从规则到大型语言模型的演进之路
自然语言处理 (NLP) 技术发展:从规则到大型语言模型的演进之路 自然语言处理(NLP)是人工智能领域中一个极具挑战性和活力的分支,其目标是赋予计算机理解、解释和处理人类语言的能力。从早期的基于规则的系统到当前由大型语言模型(LLM)引领的时代,NLP 技术经历了深刻的演…...
介绍)
CurrentHashMap的整体系统介绍及Java内存模型(JVM)介绍
当我们提到ConurrentHashMap时,先想到的就是HashMap不是线程安全的: 在多个线程共同操作HashMap时,会出现一个数据不一致的问题。 ConcurrentHashMap是HashMap的线程安全版本。 它通过在相应的方法上加锁,来保证多线程情况下的…...

手撕红黑树的 左旋 与 右旋
一、为什么需要旋转? 在红黑树中,插入或删除节点可能会破坏其五条性质,比如高度不平衡或连续红节点。 为了恢复红黑性质,我们采用局部旋转来“调整树形结构”,保持平衡。 二、旋转本质是“局部变形” 左旋和右旋不会…...

Java——反射
目录 5 反射 5 反射 类信息:方法、变量、构造器、继承和实现的类或接口。反射:反射是 Java 中一项强大的特性,它赋予了程序在运行时动态获取类的信息,并能够调用类的方法、访问类的字段以及操作构造函数等的能力。通过反射&#…...

一文了解Python中的requests库:网络交互的基础
目录 1. 前言 2. requests库的基本概念 3. requests库的适应场景 4. requests库的基本使用 4.1 安装requests 4.2 发送第一个请求 4.3 常见HTTP请求方法 4.4 响应对象的属性 4.5 发送带参数的请求 4.6 处理请求和响应 5. 高级功能 5.1 文件上传 5.2 会话对象 5.3…...

基于大模型预测的足月胎膜早破行阴道分娩全流程研究报告
目录 一、引言 1.1 研究背景与意义 1.2 研究目的与方法 1.3 研究创新点 二、胎膜早破(足月)行阴道分娩概述 2.1 胎膜早破定义与分类 2.2 足月胎膜早破行阴道分娩的现状与挑战 2.3 大模型预测引入的必要性 三、大模型预测原理与技术 3.1 大模型介绍 3.2 数据收集与…...
)
ISP流程介绍(Raw格式阶段)
一、ISP之DPC DPC(Defective Pixel Correction)也就是坏点矫正,在sensor接收光信号,并做光电转换之后。 这一步设计的意义在于:摄像头sensor的感光元件通常很多会存在一些工艺缺陷缺陷,让图像上某些像素无法正常收集到需要的光信号…...
)
Codeforces Round 1023 (Div. 2)
Dashboard - Codeforces Round 1023 (Div. 2) - Codeforces 一个构造问题,我把最大的数放在一个数组,其余数放在另一个数组,就能保证gcd不同 来看代码: #include <bits/stdc.h> using namespace std;int main() {int t;ci…...

按位宽提取十六进制值
需求:给出一个十六进制值,要求提取high和low位之间的值。比如16ha0f0,这是一个16bit宽的十六进制数0xa0f0,提取[15:12]范围内的值。 def extract_bits(value, high, low):"""从 value 中提取 [high:low] 位的值:p…...

Android设备序列号获取方式全解析
Android设备序列号获取方式全解析 前言 在Android开发中,获取设备序列号(SN)是设备管理类应用常见的需求。但不同厂商设备获取方式存在差异,且Android系统版本升级也带来了API变化。本文将系统梳理7种主流序列号获取方式&#x…...
)
Spring框架(1)
Spring框架是Java企业级开发中最受欢迎的框架之一,它通过简化开发流程、降低耦合度,让开发者能够更专注于业务逻辑的实现。本文将带你了解Spring框架的核心概念和基本用法。 一、Spring框架简介 Spring是一个轻量级的开源Java开发框架,由Ro…...
优化shellcode)
软件安全(二)优化shellcode
我们在上一节课中所写的shellcode,其中使用到的相关的API是通过写入其内存地址来实现调用。这种方法具有局限性,如切换其他的操作系统API的内存地址就会发生变化,从而无法正常调用。 所谓的shellcode不过是在目标程序中加一个区段使得程序可…...

前端使用腾讯地图api实现定位功能
1.配置key 申请地址: https://lbs.qq.com/dev/console/key/manage 2.在项目中引入jssdk <script type"text/javascript" src"https://apis.map.qq.com/tools/geolocation/min?keykey&referermyapp"></script>使用 const g…...

单片机-STM32部分:10、串口UART
飞书文档https://x509p6c8to.feishu.cn/wiki/W7ZGwKJCeiGjqmkvTpJcjT2HnNf 串口说明 电平标准是数据1和数据0的表达方式,是传输线缆中人为规定的电压与数据的对应关系,串口常用的电平标准有如下三种: TTL电平:3.3V或5V表示1&am…...

STM32外设-串口UART
STM32外设-串口UART 一,串口简介二,串口基础概念1,什么是同步和异步/UART与USART对比2,串行与并行3,波特率 (Baud Rate)4,数据帧 (Data Frame)5,TX 和 RX 三,硬件连接1,u…...

《工业计算机硬件技术支持手册》适用于哪些人群?
《工业计算机硬件技术支持手册》于2024年出版,主要讲当前正在应用的最新计算硬件技术。包括计算机各种功能接口、扩展总线、各种国际通行的板型规格等等。书中引用的数据,全部来自国际行业技术规范,书中还融入了作者几十年的工作经验和操作技…...

element-ui时间线样式修改
element-ui时间线样式修改 前两天公司给了一个需求 要求如下图所示 需求是时间在步骤条左边,看了element-ui的文档 发现并没有参数可以设置时间在步骤条的左边 那没办法 只能自己想一想办法了 首先想到的是用样式直接改变 活不多说 直接搞 第一步 选中时间这个元素 发现了这个类…...

动态规划之背包问题:组合优化中的经典NP挑战
背包问题概念: 背包问题是一种经典的组合优化的NP问题,在计算机科学、运筹学等领域有着广泛的应用。 问题可以简单的描述为: 假设有一个容量为C的背包和n个物品,每个物品i都有重量w[i]和价值v[i]。目标是选择一些物品放入背包&…...

JavaScript 基础
JS概念 JS基础概念 JS是一种运行在客户端(浏览器)的编程语言, 实现人机交换结果 作用: 网页特效表单验证数据交互服务端编程(node.js) JS的组成 ECMAScript—javaScript语言基础Web APIs—(DOM: 页面文档对象模型)(BOM: 浏览器对象模型) JS书写 位置 内部: 写到< /body…...

Vibe Coding: 优点与缺点
如果你最近在开发圈子里,你很可能听说过这个新趋势"vibe coding"(氛围编程)。 我只能说我对此感受复杂。以下是原因。 优势 在构建新项目时,靠着氛围编程达到成功感觉很自由!但对于遗留代码来说情况就不同了,尽管也不是不可能。 实时反馈和快速迭代 Cursor(…...

小动物听力评价系统基本原理简析
小动物听力评价系统是用于评估小动物听力功能的专业设备,以下从系统组成、工作原理、评价方法等方面为你介绍: 一 系统组成 声音刺激模块:能产生不同频率、强度和类型的声音信号,如纯音、啭音、短声等,以刺激小动物的听…...

spark缓存-persist
存储级别指定 persist:可以通过传入 StorageLevel 参数来指定不同的持久化级别。常见的持久化级别有: MEMORY_ONLY:将 RDD 以 Java 对象的形式存储在 JVM 的内存中。若内存不足,部分分区将不会被缓存,需要时会重新计算…...
)
树初步 #1(插排串联 - 辽宁省2024CCPC)
树初步 数的基础内容可以看看树基础 - OI Wiki里面的讲解,对一些操作的基础概念介绍的很清楚; 下面直接来看例题: 插排串联 - 辽宁省CCPC 题目大意 给定一个n1个节点的有根数; 根节点(0号)是插座&…...
)
CDGP重点知识梳理(82个)
目 录 考点分布 考试要求 第一章 数据管理-5%...
)
shell脚本基础详细学习(更新中)
shell简单介绍 Shell不仅仅是充当用户与UNIX或者localhost交互的角色,还可以作为一种程序设计 语言来使用。通过Shell编程,可以实现许多非常实用的功能,提高系统管理的自动化水平。 如果有一系列经常需要使用的命令,把它存储在一…...

记录一下学习kafka的使用以及思路
下面这是kafka的依赖 <dependency><groupId>org.springframework.cloud</groupId><artifactId>spring-cloud-starter-stream-kafka</artifactId></dependency> 我在学习的时候直接导入是没有导入成功的,我猜测大概的原因是我本…...

AT9880B北斗单模卫星定位SOC芯片
AT9880B是一款高性能北斗单模卫星导航接收机SOC单芯片,芯片集成射频前端和数字基带、北斗多频卫星信号处理引擎、电源管理功能。芯片支持接收中国北斗二号和北斗三号,支持接收B1I、B1C、B2I、B3I、B2a和 B2b等频点信号。 主要特性: 支持北斗…...