Transformer面经
请问你对Transformer有什么了解
简要回答的话可以这样:
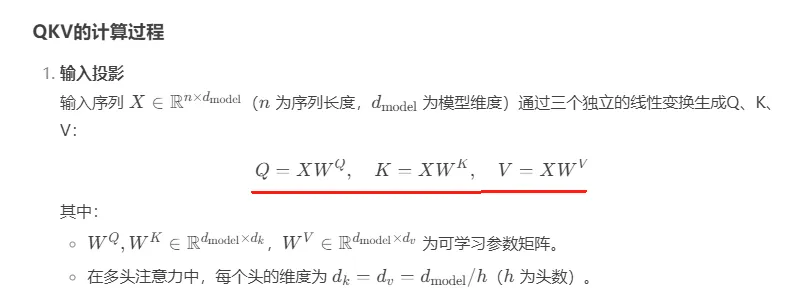
Transformer是一种基于自注意力机制的神经网络架构,它主要用于处理序列数据,如自然语言处理。
核心的组件有:自注意力机制(计算序列中每个元素与其他元素的相关性,捕捉长距离依赖)、多头注意力(通过多个注意力头并行计算,捕捉不同子空间的信息)、位置编码(为输入序列添加位置信息,弥补Transformer缺乏序列感知的不足)、前馈神经网络(对每个位置的表示进行非线性变换)、残差连接和层归一化(缓解梯度消失,加速训练)
优势:并行计算、长距离依赖、可扩展性
以下是一些常见的不足和改进方向:
1. 计算复杂度高
- 问题:自注意力机制的计算复杂度是 O( n 2 n^2 n2),其中 n n n是序列长度。对于长序列(如长文档或高分辨率图像),计算和内存开销非常大。
- 改进方向:
- 使用稀疏注意力(Sparse Attention)或局部注意力(Local Attention)来减少计算量。
- 引入线性注意力(Linear Attention)或低秩近似(Low-Rank Approximation)来降低复杂度。
- 分块处理长序列(如Longformer、BigBird等模型)。
2. 缺乏位置感知能力
- 问题:Transformer本身没有显式的序列顺序信息,依赖位置编码来引入位置信息。但位置编码在长序列中可能表现不佳,尤其是对于超出训练时最大序列长度的输入。
- 改进方向:
- 使用相对位置编码(Relative Positional Encoding)或可学习的位置编码。
- 在注意力机制中直接引入位置信息(如Transformer-XL)。
3. 数据需求量大
- 问题:Transformer通常需要大量数据才能训练出较好的效果,尤其是在预训练阶段。对于小数据集,Transformer可能表现不佳。
- 改进方向:
- 使用迁移学习,通过预训练模型(如BERT、GPT)在小数据集上进行微调。
- 数据增强(Data Augmentation)或合成数据来扩充训练集。
4. 训练成本高
- 问题:Transformer模型的参数量通常很大,训练需要大量计算资源(如GPU/TPU)和时间。
- 改进方向:
- 使用模型压缩技术,如剪枝(Pruning)、量化(Quantization)和蒸馏(Distillation)。
- 分布式训练或混合精度训练来加速训练过程。
5. 对局部信息的捕捉能力有限
- 问题:自注意力机制更擅长捕捉全局依赖,但在某些任务中(如语法解析或局部特征提取),局部信息的捕捉可能不如RNN或CNN。
- 改进方向:
- 结合CNN和Transformer(如Convolutional Transformer)。
- 在注意力机制中引入局部窗口(如Swin Transformer)。
6. 长序列建模的挑战
- 问题:虽然Transformer理论上可以处理长序列,但在实际应用中,长序列会导致注意力权重稀疏,难以有效建模。
- 改进方向:
- 使用稀疏注意力机制(如Longformer、BigBird)。
- 分层次建模(如Hierarchical Transformer)。
7. 解释性差
- 问题:Transformer的自注意力机制虽然强大,但其决策过程缺乏解释性,难以理解模型的具体行为。
- 改进方向:
- 使用可视化工具分析注意力权重。
- 结合可解释性更强的模型(如规则-based 方法)进行混合建模。
8. 对噪声敏感
- 问题:Transformer对输入数据的质量要求较高,如果输入数据噪声较大(如拼写错误、语法错误),模型性能可能下降。
- 改进方向:
- 在预处理阶段加入数据清洗和纠错机制。
- 使用对抗训练(Adversarial Training)增强模型的鲁棒性。
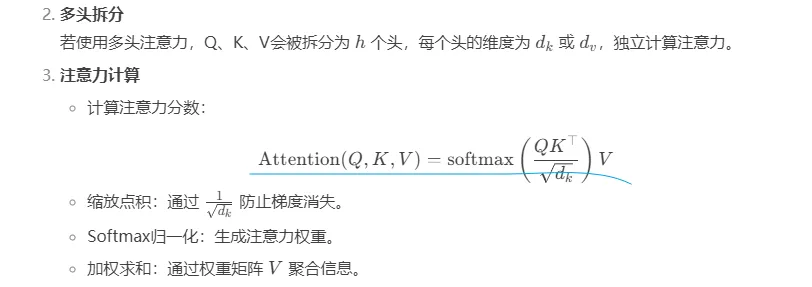
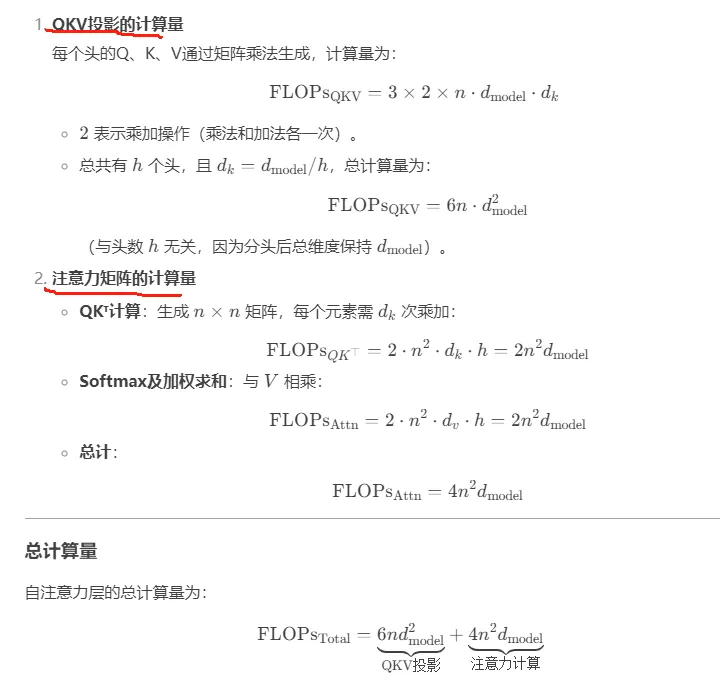
介绍一下QKV的计算过程和计算量
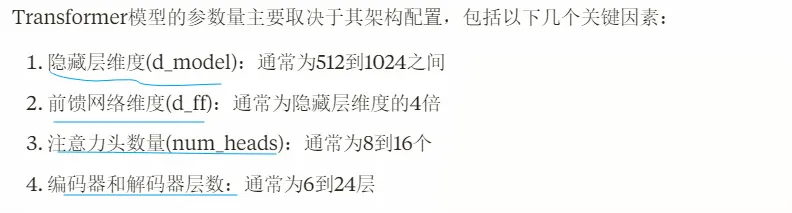
介绍一下Transformer中的参数量
Transformer为何使用多头注意力机制?(为什么不使用一个头)
多头注意力机制的设计实际上是为了让模型能够同时从不同角度理解和处理输入信息。这种并行的多角度处理方式不仅增强了模型的表达能力,还带来了类似集成学习的效果。当多个头的输出被拼接和转换后,模型获得了更丰富和稳健的特征表示。即使某些头可能在特定情况下表现不佳,其他头仍然可以提供有价值的信息,这提升了模型的整体鲁棒性。虽然使用多头会增加模型参数量,但由于可以并行计算,对训练和推理速度的影响并不显著。这种设计在提供更强大的建模能力的同时,还保持了计算效率,这也是Transformer架构成功的重要原因之一。
Transformer为什么Q和K使用不同的权重矩阵生成,为何不能使用同一个值进行自身的点乘?
- 学习更灵活和丰富的特征表示,如果使用相同的权重矩阵,Query和Key的特征表示会相同,限制了模型在不同任务中提取特征的能力,导致注意力分数缺乏多样性和灵活性。
- 捕获更复杂的上下文关系,如果Query和Key完全相同(权重矩阵相同),则模型实际上只是在计算自相关性,而非真正衡量输入序列中不同元素之间的复杂关系。
- 提升训练的稳定性;
- 增强模型的表达能力和泛化能力。
- 使用不同权重的模型性能往往好于共享权重
Q 和 K 使用不同的权重矩阵主要是为了增强模型的表达能力和灵活性,避免在自注意力中引入退化现象。虽然理论上可以共享权重,但这样可能会导致模型的表现不足,尤其是在复杂任务或长序列关系建模中。
Transformer计算attention的时候为何选择点乘而不是加法?两者计算复杂度和效果上有什么区别?
Transformer选择点乘的主要原因是:
- 计算效率更高,易于使用现代硬件(GPU/TPU)优化
- 实现更简单,代码更简洁
- 在高维空间中表现更稳定
- 不需要额外的参数,减少了模型复杂度

如果使用加法操作,为了得到有效的注意力分布,通常需要额外的激活函数和非线性映射。这引入了额外的计算步骤,总复杂度可能比点乘稍高,尤其当维度较大时。
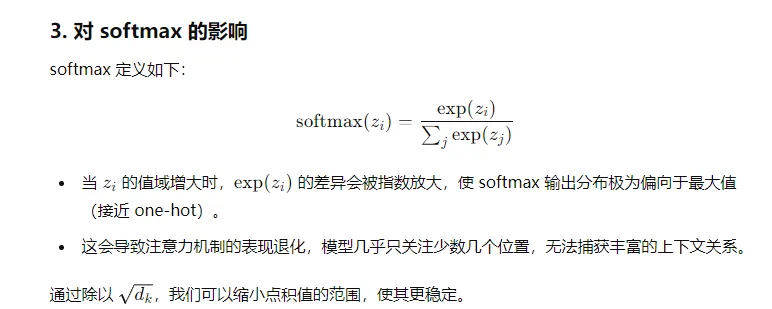
为什么在进行softmax之前需要对attention进行scaled(为什么除以dk的平方根),并使用公式推导进行讲解
其目的是为了稳定数值范围,避免过大的点积值导致 softmax 输出分布过于极端(尖锐)或不稳定

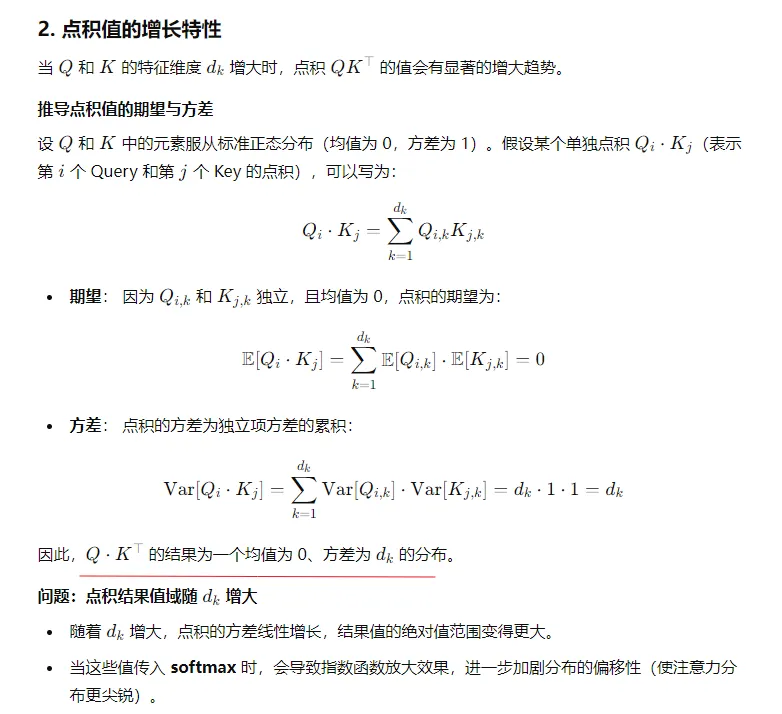
- 控制数值范围:减小点积值的方差,避免高维特征引发值爆炸。
- 平滑注意力分布:缓解 softmax 的指数放大效应,使模型捕捉更多的上下文信息。
- 提高训练稳定性:缩小输入范围,减少梯度过大或过小的问题。
在计算attention score的时候如何对padding做mask操作?
在计算 Attention Scores 时对 padding 做 mask 的关键步骤:
- 构造 Mask 矩阵,将 padding 位置设置为极小值(如 −∞)。
- 添加到 Scores,使 padding 位置在 softmax 后被归一化为 0。
- 保证计算结果的正确性,避免无效位置干扰有效的注意力分布。
Attention ( Q , K , V ) = softmax ( Q K ⊤ d k + Mask ) V \text{Attention}(Q,K,V)=\text{softmax}\left(\frac{QK^\top}{\sqrt{d_k}}+\text{Mask}\right)V Attention(Q,K,V)=softmax(dkQK⊤+Mask)V
Mask = [ 0 0 − ∞ 0 0 0 − ∞ 0 − ∞ − ∞ − ∞ − ∞ 0 0 − ∞ 0 ] \text{Mask}=\begin{bmatrix}0&0&-\infty&0\\0&0&-\infty&0\\-\infty&-\infty&-\infty&-\infty\\0&0&-\infty&0\end{bmatrix} Mask= 00−∞000−∞0−∞−∞−∞−∞00−∞0
为什么在进行多头注意力的时候需要对每个head进行降维?
对每个头进行降维是多头注意力中平衡性能、计算效率和表示能力的关键设计:
- 控制参数量,避免多头导致模型参数暴增。
- 优化计算效率,减小每头点积注意力的计算开销。
- 鼓励特征多样性,每头在降维后的不同子空间中关注不同特征。
- 保持输出一致性,通过线性变换恢复总输出维度为 d m o d e l d_{model} dmodel
大概讲一下Transformer的Encoder模块?
Transformer 的 Encoder 模块是堆叠的层状结构,每层通过 多头注意力 和 前向网络 提取序列的全局和局部特征。它通过 位置编码 和 残差连接 保证了序列信息建模的有效性和模型的训练稳定性。
H 1 = LayerNorm ( X + MHA ( X , X , X ) ) H_1=\text{LayerNorm}(X+\text{MHA}(X,X,X)) H1=LayerNorm(X+MHA(X,X,X))
H 2 = LayerNorm ( H 1 + FFN ( H 1 ) ) H_{2}=\operatorname{LayerNorm}\left(H_{1}+\operatorname{FFN}\left(H_{1}\right)\right) H2=LayerNorm(H1+FFN(H1))
Positional Encoding ( i , 2 k ) = sin ( i / 1000 0 2 k / d model ) Positional Encoding ( i , 2 k + 1 ) = cos ( i / 1000 0 2 k / d model ) \begin{array}{c}\text {Positional Encoding}(i, 2 k)=\sin \left(i / 10000^{2 k / d_{\text {model }}}\right) \\\text { Positional Encoding }(i, 2 k+1)=\cos \left(i / 10000^{2 k / d_{\text {model }}}\right)\end{array} Positional Encoding(i,2k)=sin(i/100002k/dmodel ) Positional Encoding (i,2k+1)=cos(i/100002k/dmodel )
为何在获取输入词向量之后需要对矩阵乘以embedding size的开方?意义是什么?
在 Transformer 模型中,对输入词向量进行位置编码并通过嵌入层后,有一个步骤是将词嵌入矩阵乘以嵌入维度的平方根 d m o d e l \sqrt{d_{model}} dmodel。这个操作在 Transformer 的实现中体现了一种归一化和数值稳定性调节的设计理念
主要体现在以下几个方面:
- 放大输入值的动态范围:避免初始数值过小影响注意力机制的点积结果和梯度传播。
- 增强训练稳定性:通过数值调节,使嵌入和其他模块的计算保持一致的尺度。
- 平衡词嵌入和位置编码的影响:确保两者在加法操作中对模型训练有相近的贡献。
简单介绍一下Transformer的位置编码?有什么意义和优缺点?
Transformer 的位置编码通过正余弦函数引入序列的位置信息,弥补了其本身缺乏顺序感知能力的缺点。它设计简单且高效,适合大多数任务,但在某些情况下可能不如可学习的位置编码灵活。对于复杂结构的任务,改进或替代的编码方法可能更加合适.
Transformer 模型本身没有循环或卷积结构,因此无法直接感知输入序列中词语的顺序。位置编码(Positional Encoding, PE)是 Transformer 引入的一种机制,用来补充序列中的位置信息,从而让模型能够捕获序列顺序的特征。
位置编码的计算公式
位置编码是通过固定的正弦和余弦函数生成的,其公式为:
Positional Encoding ( i , 2 k ) = sin ( i / 1000 0 2 k / d model ) Positional Encoding ( i , 2 k + 1 ) = cos ( i / 1000 0 2 k / d model ) \begin{array}{c}\text { Positional Encoding }(i, 2 k)=\sin \left(i / 10000^{2 k / d_{\text {model }}}\right) \\\text { Positional Encoding }(i, 2 k+1)=\cos \left(i / 10000^{2 k / d_{\text {model }}}\right)\end{array} Positional Encoding (i,2k)=sin(i/100002k/dmodel ) Positional Encoding (i,2k+1)=cos(i/100002k/dmodel )
其中:
p o s pos pos 表示词在序列中的位置。
i i i表示嵌入维度中的索引。
d m o d e l d_{model} dmodel 是嵌入向量的维度。
通过这种方式,每个位置会生成一个与 d m o d e l d_{model} dmodel 维度相同的向量,具有以下特点:
- 不同位置的编码是不同的。
- 编码在嵌入维度上的变化具有一定的周期性。
- 位置编码的特点
(1) 捕捉相对位置关系
- 不同位置的编码在数值上具有规律性,使得 Transformer 可以通过点积计算出相邻或远离位置之间的相对关系。
- 例如,位置之间的差值直接影响编码之间的点积结果,这种特性让模型能够感知序列顺序。
(2) 周期性
- 高频信号(低维度)捕捉短距离关系,低频信号(高维度)捕捉长距离关系。
- 多尺度信息增强了模型对全局和局部关系的建模能力。
(3) 简单、高效 - 位置编码是基于固定公式计算的,不需要额外的可学习参数。
- 适用于任意长度的序列,因为公式具有扩展性。
-
位置编码的意义
-
弥补 Transformer 缺乏顺序信息的问题:为每个输入词向量引入显式的位置信息,帮助模型理解输入的结构。
-
相对位置关系的建模:通过正余弦函数的规律性,编码能够在一定程度上表示词与词之间的相对位置。
-
不依赖具体序列长度:位置编码不需要预定义特定长度,可以灵活扩展到长序列。
-
优点
- 简单高效:通过固定公式生成,不增加模型的参数或计算复杂度。
- 平滑的位置信息变化:正余弦函数具有连续性,有利于捕捉距离关系。
- 全局和局部信息兼顾:不同频率的编码对应不同范围的依赖关系。
- 缺点
- 固定性:位置编码是固定的,在训练中不可调整,可能限制模型对某些任务的适应能力。
- 可学习的位置编码(Learnable Positional Embedding)是解决此问题的一种替代方案。
- 局限于相对距离表示:尽管位置编码可以建模相对位置,但它对复杂的结构化位置信息(如树形或图结构)不敏感。
- 长序列上的衰减:对于非常长的序列,较高位置的编码会因为指数缩放而逐渐失去影响力。
你还了解哪些关于位置编码的技术,各自的优缺点是什么?
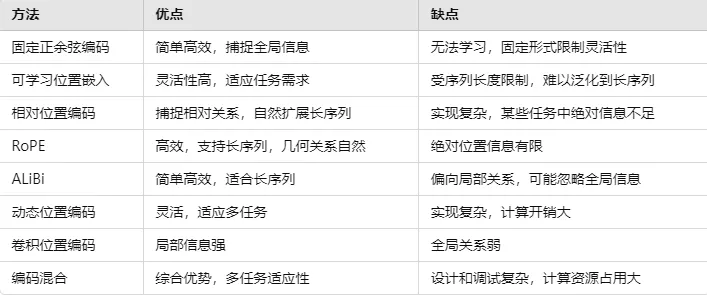
选择方法时需考虑任务需求:
- 长序列建模:选择 RoPE、ALiBi、相对位置编码。
- 对局部顺序敏感的任务:卷积位置编码或相对位置编码。
- 灵活性要求高的任务:可学习位置嵌入或动态位置编码。
简单讲一下Transformer中的残差结构以及意义。
- 残差结构通过跳跃连接解决了深度神经网络中的梯度消失问题,促进了训练的稳定性与效率。
- 它加速了网络的收敛过程,并能提高模型的表现,尤其是在处理深度网络时。
- 在 Transformer 中,残差结构与层归一化结合使用,使得模型不仅能够有效训练,还能保持较好的泛化能力。
(1) 缓解梯度消失问题
- 在深层神经网络中,梯度消失(或爆炸)是一个常见问题,特别是在训练时,随着层数的增加,梯度会变得越来越小(或越来越大),导致训练困难。
- 残差连接通过直接将输入信号加到输出上,使得信息能够直接流动到更深的层次,从而减轻了梯度消失问题。这使得即使在非常深的网络中,梯度也能够有效传播,提升训练稳定性。
(2) 提高训练效率
- 残差连接允许网络学习到与原始输入信号之间的差异(即“残差”),而不是完全从零开始学习。这样可以加速收敛过程,因为每个子层只需要学习输入与输出之间的差异。
- 在训练过程中,残差结构使得每个子层都可以通过增量方式优化,而不是完全重塑输入信号。
(3) 改善模型表现
- 残差连接使得网络更加灵活,能够表示更复杂的函数关系。它不仅能学习到每层的直接输出,还能更好地保留原始输入的特征,从而提高模型的表达能力。
- 在很多情况下,残差结构能够帮助模型达到更好的泛化能力,减少过拟合。
(4) 增加深度可扩展性
- 在没有残差连接的情况下,深度增加可能会导致性能下降,因为信息流动变得困难。引入残差连接后,网络深度可以进一步增加,而不会显著影响训练的效果,因此 Transformer 模型能够处理非常深的网络结构。
为什么transformer块使用LayerNorm而不是BatchNorm?LayerNorm 在Transformer的位置是哪里?
1. BatchNorm 和 LayerNorm 的区别:
- BatchNorm(批量归一化)通常在神经网络中用于每个小批次的训练数据,通过对每一层的输入进行归一化来加速训练。它在处理每个特征通道时,计算该通道在批次中的均值和标准差。
- LayerNorm(层归一化)则是在每个样本内的所有特征维度上进行归一化。即,计算每个样本内部的均值和标准差,而不是跨批次。它不依赖于批次的大小,因此适合于在每个样本独立处理的任务中使用。
2. 为什么 Transformer 选用 LayerNorm:
-
Transformer 的训练过程依赖于序列长度和并行性:由于 Transformer 中的每个输入样本(通常是句子或序列)可以具有不同的长度,且模型需要并行处理所有样本。如果使用 BatchNorm,它依赖于批量内样本的统计信息,在每次计算时,批量大小对归一化的效果有很大影响,尤其在处理变长序列时,批次的统计信息可能会受到干扰。
LayerNorm 在这种情况下非常适合,因为它是对每个输入样本(即每个序列)进行归一化,而与批量大小无关,适应性更强。它能更好地处理变长输入(如机器翻译中的句子长度不同)和保证在不同输入序列长度下的稳定性。
3. LayerNorm 在 Transformer 中的位置:
Transformer 中的 LayerNorm 通常出现在以下几个地方:
- 多头注意力子层:
- 在每个子层(如多头注意力机制)之后,首先进行残差连接(将输入和子层的输出相加),然后进行 LayerNorm。这种顺序是为了保证输入信号的稳定流动,并防止梯度消失或爆炸。
- 前馈神经网络子层:
- 类似地,在前馈神经网络子层的残差连接后,也会进行 LayerNorm 处理。
具体来说,在 Transformer 中,LayerNorm 是这样使用的:
- 输入通过多头注意力机制计算得到注意力输出。
- 输出与输入进行残差连接,并将结果送入 LayerNorm。
- 然后通过前馈神经网络进行处理。
- 前馈网络的输出也经过残差连接,并进行 LayerNorm 处理。
因此,LayerNorm 一般位于每个子层的后面,在每个子层的残差连接之后。
总结:
- BatchNorm 依赖于批量信息,因此不适合处理不同长度的序列或在需要高度并行的模型中。
- LayerNorm 是按样本进行归一化,不受批量大小影响,适合 Transformer 这类结构,尤其是变长序列处理和并行化训练。
- 在 Transformer 中,LayerNorm 出现在每个子层的后面,通常在残差连接后应用。
简答讲一下BatchNorm技术,以及它的优缺点。
BatchNorm 是一种深度神经网络中常用的技术,旨在通过对每一层的输入进行归一化,减少训练过程中的内部协变量偏移(internal covariate shift),从而加速训练并提高模型的稳定性。
1. BatchNorm的工作原理:
- 对每一层的输入,BatchNorm 在每个批次中计算均值和标准差,利用这些统计量对每个输入特征进行归一化。
-
计算每个特征在批次中的均值和标准差。
-
使用计算出的均值和标准差对每个样本的每个特征进行归一化。
-
然后,使用可学习的缩放参数 γ 和偏移参数 β 对归一化后的输出进行线性变换,以恢复其表达能力。
-
优点:
- 加速训练:
- BatchNorm 可以通过缓解内部协变量偏移(Internal Covariate Shift),使得每层的输入分布保持相对稳定,从而加速模型的收敛速度。
- 提高稳定性:
- 通过对每一层的输入进行归一化,BatchNorm 减少了梯度消失或爆炸的问题,从而提高了训练的稳定性。
- 正则化效果:
- BatchNorm 具有轻微的正则化作用,因为它基于每个小批次的统计量,因此它在一定程度上可以防止过拟合,尤其是在没有显式正则化(如Dropout)的情况下。
- 允许使用更高的学习率:
- 由于其加速训练和稳定性的作用,BatchNorm 使得使用较大的学习率成为可能,从而进一步加速训练过程。
缺点:
- 对批次大小敏感:
- BatchNorm 在计算均值和方差时依赖于整个批次的数据。如果批次大小过小,计算出的统计量可能不稳定,从而影响模型的性能。
- 训练和推理时行为不一致:
- 在训练过程中,BatchNorm 使用的是批次的均值和方差,而在推理(测试)过程中,使用的是整个训练集的均值和方差。这种行为不一致可能导致推理阶段的性能下降,尤其是在批次大小较小或者数据分布发生变化时。
- 增加计算开销:
- BatchNorm 需要额外的计算来计算均值、方差以及反向传播时的梯度,这增加了额外的计算和内存开销,尤其是在处理非常大的数据集时。
- 不适合小批量数据:
- 对于小批量数据(如序列数据),由于每个批次的样本较少,均值和方差的估计可能不准确,从而影响模型性能。
简单描述一下Transformer中的前馈神经网络?使用了什么激活函数?相关优缺点?
在 Transformer 中,每个 Encoder 和 Decoder 都包含一个前馈神经网络(Feed-Forward Neural Network, FFN)。该网络由两个全连接层和一个激活函数组成,作用是对每个位置的表示进行独立的非线性变换。
使用了ReLU激活函数
优点:
- 非线性映射:
- 前馈神经网络引入了非线性激活函数(如 ReLU),能够学习更复杂的特征映射,提高模型的表达能力。
- 增强模型的灵活性:
- 通过前馈网络,Transformer 可以在每个位置上进行独立的非线性变换,从而更好地捕捉输入序列中的复杂模式和关系。
- 简化计算:
- 前馈神经网络在每个位置上独立处理数据,因此它与自注意力机制(self-attention)并行工作,能够提升计算效率。
缺点:
- 计算开销:
- 尽管前馈神经网络的每一层都处理的是每个位置的独立数据,但由于每个位置都要通过两个全连接层,仍然增加了计算量和内存开销,尤其是在序列长度较长时。
- 对序列间的依赖较弱:
- 相比自注意力机制,前馈神经网络只在每个位置上做独立的计算,缺乏跨位置的依赖建模。它的作用是对每个位置进行局部非线性变换,而不是直接捕捉序列中不同位置之间的关系。
Encoder端和Decoder端是如何进行交互的?(在这里可以问一下关于seq2seq的attention知识)
- Encoder 和 Decoder 之间的交互主要通过 Encoder-Decoder Attention 实现,Decoder 在每一层通过对 Encoder 输出的关注,获取源序列的信息来生成目标序列。
- 具体来说,Decoder 先计算自注意力,再计算与 Encoder 的交互,通过 Encoder-Decoder Attention 将源序列的上下文信息融入到目标序列的生成中。这种交互机制是 Transformer 中实现源语言与目标语言信息传递的关键。
Decoder阶段的多头自注意力和encoder的多头自注意力有什么区别?(为什么需要decoder自注意力需要进行 sequence mask)
Decoder 阶段的多头自注意力与 Encoder 的多头自注意力的区别
在 Transformer 中,Encoder 和 Decoder 都使用多头自注意力(Multi-Head Self-Attention)机制,但两者的作用和计算方式有显著不同。具体的区别可以归纳如下:
1. Encoder 中的多头自注意力:
- 在 Encoder 中,每个位置的输入(即每个词的表示)可以与序列中的其他所有位置进行自注意力计算。
- Encoder 的自注意力机制计算的是输入序列的上下文信息。每个位置(如一个单词)的输出是基于整个输入序列的其他所有位置计算得到的加权和。这个过程是对整个输入序列的“全局建模”,因此每个位置的信息可以与所有其他位置的信息进行交互。
- 没有限制,Encoder 计算自注意力时,可以自由地访问序列中的所有位置(即,输入序列中的所有词都可以在相互之间进行注意力操作)。
2. Decoder 中的多头自注意力:
- 在 Decoder 中的自注意力与 Encoder 中的自注意力有一个重要区别:Decoder 自注意力需要进行遮挡(Masking),即 每个位置只能关注该位置之前的词(或标记),不能访问未来的词。
- 这是因为 Decoder 的目标是逐步生成目标序列。每个位置的生成只依赖于当前位置及其之前生成的词,而不能访问未来词的信息,否则就会破坏序列生成的因果关系(即训练时泄露未来信息的问题)。
- 在训练过程中,Decoder 的当前单词只能基于 已生成的单词进行计算,避免未来信息的泄漏。
为什么 Decoder 自注意力需要进行 Sequence Mask(序列遮挡)
在 Decoder 阶段,sequence mask(序列遮挡)是必需的,因为生成目标序列时需要确保 自回归性(autoregressive property),即每个时间步的输出仅依赖于当前和之前的时间步。这样做的目的是:
- 防止信息泄露:
- 如果没有遮挡,Decoder 就可以看到未来位置的信息,这样会导致当前时刻的预测受到未来时刻的信息影响,从而破坏了模型的因果性。
- 例如,在语言模型中,模型需要根据已生成的单词来预测下一个单词。为了确保这种 因果顺序,在训练时需要使用遮挡,防止当前时刻使用到未来的信息。
- 实现自回归生成:
- 由于生成过程是一个 逐步生成 的过程,当前的生成步骤是依赖于之前的所有生成步骤的。使用遮挡可以确保每个时刻的输出仅依赖于 当前时刻和之前的时刻,而不会泄漏未来时刻的信息。
- 例如,在机器翻译中,生成目标序列时,当前时刻的翻译是基于已生成的翻译,而不是未来的目标词。
在实际计算中,遮挡通常是通过对 Decoder 的自注意力矩阵(Query 与 Key 的点积计算结果)进行修改来实现的:
- 在计算注意力得分时,给未来的位置赋一个非常大的负值(如 -∞),然后通过 softmax 操作,确保这些位置的注意力得分变为零。
- 这样,softmax 后的注意力分布中,未来的位置会被屏蔽掉,不会对当前时刻的计算产生影响。
数学上,假设注意力得分矩阵为 ( A ),Mask 的操作可以通过加一个 mask 矩阵 ( M ) 来实现:
A m a s k e d = A + M A_{masked} = A + M Amasked=A+M
其中, M M M 对未来位置进行遮挡,设置为一个非常小的值(如 -∞)。最终的得分会通过 softmax 函数来归一化,保证只有当前和之前的时间步得到有效的注意力权重。
总结
- Encoder 中的多头自注意力 可以自由地计算整个序列的上下文信息,因为它不需要遵循自回归生成的顺序。
- Decoder 中的多头自注意力 需要使用 sequence mask 来确保模型在每个时刻只依赖于当前位置及其之前的位置信息,而不能访问未来的词汇,从而保持生成过程的因果性。
- 序列遮挡(Sequence Mask) 的作用是防止信息泄露,确保 Decoder 在生成过程中遵循正确的自回归顺序,只使用已生成的部分进行预测。
Transformer的并行化提现在哪个地方?Decoder端可以做并行化吗?
1. Encoder 的并行化:
- 每一层的自注意力和前馈神经网络计算是独立的。在 Encoder 中,所有的自注意力计算(包括多头自注意力)可以并行执行,因为每个位置的输出仅依赖于当前输入序列的所有位置(没有时序依赖)。这使得 Encoder 的各层可以 并行处理 输入序列中的每个位置。
- 多头注意力的并行:在每一层的自注意力机制中,多个头的注意力计算是独立的,因此可以并行执行。这种并行性使得 Transformer 能够在计算时提高效率。
- 前馈神经网络的并行:在每一层的前馈神经网络部分,每个位置的变换是独立的,因此可以对每个位置并行计算。
总结:Encoder 端的所有计算都是并行的,包括自注意力计算和前馈神经网络计算,因为每个位置的计算都只与该位置的输入和上下文相关,不涉及时间步的顺序。
2. Decoder 的并行化
在 Decoder 中,并行化相对复杂,因为 Decoder 需要保持自回归生成的顺序。也就是说,当前时刻的生成依赖于 已生成的目标序列,因此不可能像 Encoder 那样完全并行化。然而,仍然可以在 Decoder 中进行一定程度的并行化,具体体现在以下几个方面:
- 自注意力(Self-Attention)并行化:
- 在 Decoder 的每一层,自注意力机制(即当前时刻的输出和之前时刻的输出)是可以并行计算的。即使 Decoder 需要依赖于已生成的目标序列,每个时间步的计算是独立的,这部分可以并行化。
- 对于 Decoder 的每个位置,仍然可以并行地计算该位置和之前所有位置的自注意力,只是在每个时间步生成结果时,要确保仅使用已生成部分。
- Encoder-Decoder Attention 并行化:
- Encoder-Decoder Attention(即 Decoder 层与 Encoder 输出的交互)可以并行计算,因为它是基于 Encoder 的输出进行的注意力计算,而 Encoder 的输出在训练时已经计算出来并保持不变。
3. 序列遮挡(Masking)对并行化的影响:
- 在 Decoder 端的自注意力计算中,使用了序列遮挡(masking),确保每个时间步的生成只依赖于之前的时间步,而不能访问未来的词汇。这种遮挡操作会影响并行化的程度。
- 在训练时,尽管 Decoder 中存在遮挡,但由于我们在训练时同时处理所有位置的输入(而不是逐个时间步生成目标序列),因此 在每一层中,注意力计算是可以并行的,只不过每个位置的查询会受到遮挡影响。
4. Decoder 的生成时并行化:
- 训练时,Decoder 中各个位置的自注意力计算和 Encoder-Decoder Attention 是可以并行的。
- 推理时,由于 Decoder 需要依赖上一步生成的输出作为输入,因此 Decoder 的生成过程不能像 Encoder 那样完全并行。每次生成一个单词后,Decoder 需要基于当前的已生成部分来生成下一个单词,导致生成过程是 逐步进行 的,不能完全并行化。
总结:
- Encoder 端的计算完全可以并行化,因为每个位置的计算是独立的,不存在依赖。
- Decoder 端的并行化相对有限,因为 Decoder 需要逐步生成目标序列,每个位置的输出依赖于前一个位置的输出。但是,在 训练时,Decoder 的计算仍然有部分可以并行化,特别是 自注意力 和 Encoder-Decoder Attention 的计算。
尽管 Decoder 的 逐步生成 过程限制了推理时的并行性,但在 训练过程中,由于所有位置的计算不依赖于生成顺序,Transformer 的并行性仍然可以得到充分的发挥。
简单描述一下wordpiece model 和 byte pair encoding
1. WordPiece Model
WordPiece 是一种子词级别的分词方法,最早被用于 Google 的 BERT 模型中。它的目标是将词汇表限制在一个较小的大小,同时能够有效地表示语言中不同的单词。WordPiece 的主要思想是将单词拆解成更小的 子词(subwords),并通过一个 贪婪算法 构建词汇表。
工作原理:
- 初始词汇表:WordPiece 从字符级别开始构建词汇表,即首先将每个单词视为字符的集合。
- 合并操作:通过计算每对相邻的子词对的频率(例如,字符对或现有的子词对),WordPiece 会选择频率最高的对子进行合并,生成新的子词(例如,将“##at”和“##e”合并为“##ate”)。
- 迭代合并:反复执行这一过程,直到词汇表达到预定的大小或没有更多可以合并的对子。
- 最终词汇表:最终生成的词汇表包含了一些常见的子词(如 “##ing”, “##ed” 等),这些子词可以高效地表示大多数单词。
优点:
- 可以处理未登录词(out-of-vocabulary, OOV),因为它将词拆解为更小的子词。
- 能够在有限的词汇表大小下表示大量的单词。
- 在文本生成任务中尤其有效,因为它可以捕捉到语言中常见的词缀、前缀、后缀。
缺点:
- 对于非常少见的词,WordPiece 可能会生成多个子词,导致表示效率降低。
- 需要事先构建和训练词汇表,这可能会增加计算和存储开销。
2. Byte Pair Encoding (BPE)
Byte Pair Encoding 是一种基于频率的分词方法,最初用于数据压缩,但后来被引入到自然语言处理中作为子词分割的一种方法。BPE 的核心思想是反复合并最常见的字符对或子词对,直到达到所需的词汇表大小。
工作原理:
- 初始化:从字符级别开始,将每个单词视为一个字符序列。
- 计算频率:计算文本中每对相邻字符(或子词)的出现频率。
- 合并频率最高的对子:选择出现频率最高的字符对(例如,“a”和“b”),将它们合并为一个新的子词。
- 重复合并:继续寻找频率最高的字符对进行合并,直到词汇表达到预定的大小。
- 最终词汇表:BPE 的输出是一个词汇表,包含了所有通过合并操作得到的子词。
优点:
- 简单有效,易于实现。
- 可以处理OOV问题,通过子词的组合表示未知词。
- 能在词汇表大小有限的情况下表示大量单词。
缺点:
- 对于一些非常少见的词,BPE 可能会生成较长的子词,导致表示不够紧凑。
- 由于是基于贪婪算法,可能不会最优地分配子词,特别是在复杂语言中。
总结对比
| 特点 | WordPiece | BPE |
|---|---|---|
| 初始化分词单元 | 从字符开始 | 从字符开始 |
| 合并策略 | 贪婪合并高频子词对 | 贪婪合并高频字符对 |
| 合并规则 | 合并字符或子词对生成新的子词 | 合并最常见的字符对,逐步生成新的子词 |
| 优点 | 处理OOV效果好;可以拆分常见的词缀和词根;语境捕捉好 | 简单有效,适用于大多数语言 |
| 缺点 | 需要事先训练词汇表;有时不能生成最优的子词组合 | 对于少数复杂语言,子词可能过长;可能不会最优地分配子词 |
总结:WordPiece 和 BPE 都是基于子词的分词技术,能够有效地减少词汇表的大小并处理 OOV 问题。WordPiece 更加注重语言学特征,通常能捕捉更精细的子词结构,适用于更复杂的任务;而 BPE 更加简洁,常用于较为简单的任务和语言。
Transformer训练的时候学习率是如何设定的?Dropout是如何设定的,位置在哪里?Dropout 在测试的需要有什么需要注意的吗?
在 Transformer 中,学习率的设定通常使用了一种 学习率调度策略,特别是 Warmup + 自适应衰减 的组合方式。
Dropout 的位置:
- 多头自注意力(Multi-Head Attention):
- 在 Query、Key、Value 的线性变换后,通常会应用 Dropout,以减少模型对单个特征的依赖。
- 在 注意力得分 的 softmax 操作之前,也会加入 Dropout,防止过拟合。
- 前馈神经网络(Feed-Forward Network):
- 在前馈网络的激活函数输出后(例如 ReLU),通常也会加入 Dropout,进一步避免过拟合。
- 位置编码和层间连接:
- 在 Transformer 中的每一层(包括 Encoder 和 Decoder),在每一层的输入和输出之间,也通常会应用 Dropout。这样可以防止层与层之间的过度依赖。
Dropout 在测试时的处理
-
训练时,Dropout 会随机丢弃神经元(即将部分神经元的输出设置为零),这是一种用于防止过拟合的正则化策略。
-
测试时,Dropout 的处理方式与训练时有所不同。在推理阶段(即测试时),不再进行随机丢弃神经元,而是使用所有神经元。然而,为了保持训练和推理阶段的输出一致,需要将神经元的输出按照 Dropout 比例缩放。即,每个神经元的激活值会乘以一个系数(通常是 1−dropout_rate
例如,假设 Dropout 比例为 0.1,那么在训练时,10%的神经元会被丢弃,90%的神经元会被保留并参与计算;而在测试时,所有神经元都会参与计算,但输出会乘以 0.9。
原因:
- 训练时,通过 Dropout 随机丢弃部分神经元,可以使网络更健壮。
- 测试时,网络需要使用所有神经元的输出,但为了与训练时的行为一致,必须进行 缩放,否则会因为测试时不再丢弃神经元而导致输出值变大,从而影响模型的预测效果。
bert的mask为何不学习transformer在attention处进行屏蔽score的技巧?
mask 是用来处理 遮蔽语言模型(Masked Language Model, MLM) 的核心机制,旨在通过遮蔽输入序列中的一些单词(或子词)来进行训练。这个操作的目的是通过上下文信息来预测被遮蔽的单词,从而训练模型的语言理解能力。
然而,BERT 在 attention 计算中并没有使用 Transformer 的传统遮蔽技巧(例如,在自注意力计算中对未来位置进行遮蔽),主要原因有以下几点:
1. 任务目标不同
BERT 的训练目标是通过 Mask Language Model(MLM) 来预训练模型。BERT 会随机地将输入序列中的一些单词(或子词)用一个特殊的 [MASK] 标记来替换,然后通过上下文来预测这些被遮蔽的单词。这与传统的 自回归模型(如 GPT)不同,自回归模型通常是通过 序列生成 来进行训练的,每一步生成都依赖于之前的步骤。
在这种情况下,BERT 不需要像生成任务那样关注 未来 的单词,因此在 BERT 的训练中,不需要在 自注意力(Self-Attention) 中对未来位置的权重进行遮蔽。每个位置的遮蔽是 针对输入单词的预测,而不是防止信息泄露给未来的位置。
2. Masked Language Model 的遮蔽
BERT 的 masking 机制与 Transformer 中的自注意力遮蔽不同。BERT 在 输入阶段 直接对部分单词进行遮蔽,而不是在自注意力计算时进行遮蔽。这种遮蔽是通过在模型输入时直接替换某些单词为 [MASK],而在模型内部并不需要像自回归模型那样进行时序性的限制。
与自回归模型的区别:
- 在自回归模型(如 GPT)中,生成每个单词时,当前的单词只能依赖于之前的单词,因此在计算 attention score 时需要 mask future positions(通过在自注意力机制中屏蔽掉未来的单词,以避免信息泄漏)。
- BERT 的 MLM 任务并不涉及生成问题,因此并不需要在计算注意力时屏蔽掉未来的词。
3. 如何处理遮蔽单词
- 在 BERT 中,遮蔽的单词([MASK])并不会参与到自注意力的计算中。也就是说,BERT 计算注意力时,实际上是通过 忽略 [MASK] 的位置 来确保模型不会将
[MASK]作为有效的信息传递给其他位置。通过这种方式,BERT 训练过程中 只关注真实词汇的上下文信息,而不对 [MASK] 标记本身的内容进行推理。 - 对于 训练中的遮蔽单词,BERT 需要 预测 它们是什么,而非在注意力层面上进行单独的屏蔽处理。它会从上下文中获取信息,并通过一个特殊的预测任务(MLM)来学习词语的表示。
4. 不同的架构需求
- 在 Transformer 的 标准 自注意力计算中,通常会 mask future positions(即,遮蔽未来的词)以避免模型泄露未来信息(如在文本生成任务中)。这种方法适用于自回归生成任务。
- 然而,在 BERT 的 预训练任务(MLM)中,并没有生成目标。BERT 的目标是通过上下文来理解和填充缺失的信息,而不是生成下一个词。因此,BERT 的目标是无序的,它的注意力机制不需要关注未来单词的预测,故也不需要遮蔽未来的位置。
5. Transformer Attention 屏蔽技巧(Masking Attention Scores)
- 在一些生成任务中,遮蔽 future tokens 是必要的,因为生成当前 token 时,模型不能“看到”未来的 token。
- 在 BERT 中,并不涉及生成任务,所以它的训练任务并不要求屏蔽掉未来的 token 信息。BERT 训练时只是在输入中随机遮蔽一些单词,而不是在计算 self-attention 时进行时序屏蔽。
总结:
BERT 的 masking 和 Transformer 的自注意力机制中的 屏蔽未来位置(masking future tokens)是不同的:
- BERT 通过直接在输入中随机遮蔽一些单词来训练模型进行预测,不需要 在计算注意力时对未来位置进行屏蔽。
- Transformer 的传统自注意力机制会对未来位置进行遮蔽,通常用于 生成任务,目的是避免模型看到未来的单词。
BERT 在训练时的目标是通过上下文填充被遮蔽的单词,而不是生成任务,所以它不需要像生成模型那样在 attention 中遮蔽未来位置的信息。
相关文章:
Transformer面经
请问你对Transformer有什么了解 简要回答的话可以这样: Transformer是一种基于自注意力机制的神经网络架构,它主要用于处理序列数据,如自然语言处理。 核心的组件有:自注意力机制(计算序列中每个元素与其他元素的相…...

学习Python的第二天之网络爬虫
30岁程序员学习Python的第二天之网络爬虫的信息提取 BeautifulSoup库 地址:https://beautifulsoup.readthedocs.io/zh-cn/v4.4.0/ 1、BeautifulSoup4安装 在windows系统下通过管理员权限运行cmd窗口 运行pip install beautifulsoup4 测试实例 import requests…...

【基础】Python包管理工具uv使用教程
一、uv简介 uv 是由 Astral(前身为 Basis)团队开发的 Python 包安装器和解析器,完全使用 Rust 语言编写。与传统 Python 工具不同,uv 将多个工具的功能整合到一个高性能的解决方案中,旨在提供更现代、更高效的 Python…...

【十五】Mybatis动态SQL实现原理
Mybatis动态SQL实现原理 目录 Mybatis动态SQL实现原理 概述 动态 SQL 实现原理 总结 概述 每天日常开发都在使用mybatis,但是很多人并没有花心思去理解mybatis的实现原理,一直处于使用阶段,程序员的使命是改变世界,这一点可能…...

UE5 把翅膀动画额外创建动画蓝图并和角色绑定混合动画
把翅膀和角色合并,把翅膀绑在Spine_3上 在5.3内,需要LayerSetup指定骨骼才能使用混合...
)
Coding Practice,48天强训(30)
Topic 1:爱吃素(素数性质) 爱吃素 在强训25的第一题我总结过关于素数的几种判断方式,如果忘了可以回去看 第一次写我是这样写的 #include <bits/stdc.h> using namespace std;bool isPrime(long long &a, long long …...

华为私有协议Hybrid
实验top图 理论环节 1. 基本概念 Hybrid接口: 支持同时处理多个VLAN流量,且能针对不同VLAN配置是否携带标签(Tagged/Untagged)。 核心特性: 灵活控制数据帧的标签处理方式,适用于复杂网络场景。 2. 工作…...

神经网络之互动练习详解:从基础到拟合非线性数据
神经网络之互动练习详解:从基础到拟合非线性数据 在机器学习的世界里,神经网络是一种强大而神奇的工具,它可以帮助我们解决各种复杂的问题。今天,我们就通过一个有趣的互动练习,来深入了解神经网络的工作原理以及如何…...

遨游科普:2025年,三防平板有多智能?
在极端环境与复杂场景中,专业设备的可靠性始终是行业应用的核心命题。随着物联网、5G通信与边缘计算技术的深度融合,三防平板已突破传统“坚固耐用”的单一属性,进化为集多模通讯、智能感知与场景化扩展于一体的移动智能终端。 AORO P9000三防…...

基于C++的IOT网关和平台7:github项目ctGateway设备协议开发指南
初级代码游戏的专栏介绍与文章目录-CSDN博客 我的github:codetoys,所有代码都将会位于ctfc库中。已经放入库中我会指出在库中的位置。 这些代码大部分以Linux为目标但部分代码是纯C++的,可以在任何平台上使用。 源码指引:github源码指引_初级代码游戏的博客-CSDN博客 系…...

yolov8中的python基础--模块导入篇
import语句有几种不同的写法,它们有不同的用途和优势。 1. 直接 import 语法 import module_name 用途 导入整个模块,使用时需要通过模块名访问其中的内容。 示例 import os print(os.listdir()) # 必须用 os. 前缀 适用场景 当需要频繁使用模块…...
_csdn)
26.2Linux中SPI的驱动实验(编程)_csdn
我尽量讲的更详细,为了关注我的粉丝!!! 这里我们用到的是stm32mp157的板子,所以我们看一下SPI用到的引脚。 1、硬件原理图分析 SPI1_MOSI(对应芯片引脚 SDA/SDI ):主机输出从机输入…...

uv简单使用
通过uv创建项目和虚拟环境 初始化项目 uv init --package my-project 初始化一个名为 my-project 的新项目,并生成必要的文件结构。 创建虚拟环境 uv venv .venv 激活虚拟环境 # For Windows .venv\Scripts\activate# For macOS/Linux source .venv/bin/acti…...
和易损性(Vulnerability)在R中实现)
扩增子分析|微生物生态网络稳定性评估之鲁棒性(Robustness)和易损性(Vulnerability)在R中实现
一、引言 周集中老师团队于2021年在Nature climate change发表的文章,阐述了网络稳定性评估的原理算法,并提供了完整的代码。自此对微生物生态网络的评估具有更全面的指标,自此网络稳定性的评估广受大家欢迎。本系列将介绍网络稳定性之鲁棒性…...

线性回归评价标准
In [1]: 12345 import numpy as npfrom sklearn.linear_model import LinearRegressionimport sklearn.datasets as datasets 12 ()diabetesdiabetes $$datasets.load_diabetes In [2]: Out[2]: {‘data’: array([[ 0.03807591,0.05068012,0.06169621,…,-0.00259226, 0.0…...

Qt—鼠标移动事件的趣味小程序:会移动的按钮
1.项目目标 本次根据Qt的鼠标移动事件实现一个趣味小程序:当鼠标移动到按钮时,按钮就会随机出现在置,以至于根本点击不到按钮。 2.项目步骤 首先现在ui界面设计控件(也可以用代码的方式创建,就不多说了) 第一个按钮不需…...

深度解析:2D 写实交互数字人 —— 开启智能交互新时代
在当今数字化浪潮汹涌澎湃的 era,人机交互模式正经历着前所未有的变革与重塑。从最初冷冰冰的机械按键,到如今灵动逼真的数字化形象,交互的内涵不断拓展,已不再局限于信息的单向传递,情感交流、场景融合等多维度需求逐…...

论微服务架构设计及应用
目录 摘要(300~330字) 正文(2000~2500字,2200字为宜) 背景介绍(500字做左右) 论点论据(1500字做左右)...

处理 Clickhouse 内存溢出
一、前情提要 近日,测试服务器配置时,发现当复杂聚合场景的并发度压到20时,会出现clickhouse内存溢出,内存不足报错,如包含Exception: Memory limit (for query)、Exception: Memory limit (total) exceeded等…...

计算机网络复习资料
前情提要https://blog.csdn.net/Liu_Xin233/article/details/134773846?fromshareblogdetail&sharetypeblogdetail&sharerId134773846&sharereferPC&sharesourceLiu_Xin233&sharefromfrom_link第一章 概述 一、计算机网络在信息时代中的作用(…...

数据结构与算法:区间dp
前言 区间dp也是动态规划里很重要的一部分。 一、内容 区间dp的根本原理就是把大范围问题分解成若干小范围的问题去求解。一般来讲,常见的用法有对于两侧端点去展开可能性和对于范围上的划分点去展开可能性。 二、题目 1.让字符串成为回文串的最少插入次数 class Soluti…...

iPaaS制造案例丨某照明行业头部企业借助谷云科技iPaaS步入数字化转型“快车道”
作为国民经济支柱产业,照明灯饰行业历经技术迭代正加速推进数字化转型。从传统照明到智能物联时代,行业领军企业持续探索智能制造升级路径,通过数字化手段重构产业链效率,为产业智能化转型提供标杆示范。 该企业作为国内领先的照明…...

vue3+ts学习!
今天学习一下vue3ts技术! vue3有两种创建方式 (1)vue-cli (2)vite(官方推荐) 所以我用vite创建一个项目 直接在官网上面写一个这个!cmd执行完后,会让你输入项目名称…...

如何使用 QuickAPI 推动汽车行业数据分享:数据仓库场景下的实践
目录 一、行业痛点:数据孤岛与系统复杂性 二、技术转型:从 Hadoop 到华为 DWS 的数据仓库升级 三、引入 QuickAPI:构建统一的数据服务中台 ✅ QuickAPI 的核心能力 四、落地场景实践 1. 经销商管理数据服务化 2. 汽车维保与销售数据整…...
)
生命游戏(中等)
思路比较简单:复制一份原始数组;根据复制数组中邻居细胞的状态来更新 board 中的细胞状态。 class Solution {public void gameOfLife(int[][] board) {int[] neighbors{0,1,-1};int rowsboard.length;int colsboard[0].length;int[][] copyboardnew i…...

2025 RSAC|大语言模型应用风险与厂商攻防新策略
RSA大会全球影响力及2025年LLM热议概览 作为全球规模最大、影响力最深远的网络安全盛会之一,RSA大会每年汇聚数万名业界人士共商安全趋势。在2025 RSAC上,生成式人工智能(Generative AI)尤其是大型语言模型(LLM&#x…...

深入理解 Linux 阻塞IO与Socket数据结构
一、阻塞IO的直观演示 示例代码:最简单的阻塞接收程序 #include <stdio.h> #include <sys/socket.h> #include <netinet/in.h>int main() {// 创建TCP套接字int sockfd socket(AF_INET, SOCK_STREAM, 0);// 绑定地址端口struct sockaddr_in ad…...
--- GPT1论文研读)
大模型系列(三)--- GPT1论文研读
论文链接: GPT1: Improving Language Understanding by Generative Pre-Training 点评: 首次将Transformer的decoder部分引入无监督训练且引入了辅助训练目标。文章证明无监督预训练显著提升判别任务性能,其中Transformer架构和长依赖文本数…...
详解与 Vue3 实战示例)
14.Three.js 中的 SpotLight(聚光灯)详解与 Vue3 实战示例
在 Three.js 中,SpotLight(聚光灯)是一种能沿着一个方向发射锥形光束的光源,广泛应用于舞台灯光、聚焦灯、手电筒等模拟场景中。本文将详细介绍 SpotLight 的各个属性和使用方法,并提供一个基于 Vue3 Composition API…...

unix 详解
Unix 系统深度解析 一、Unix 起源与历史 Unix 是由 贝尔实验室(AT&T Bell Labs) 的 肯汤普森(Ken Thompson) 和 丹尼斯里奇(Dennis Ritchie) 于 1969 年 开发的操作系统。其诞生背景是: …...

NetSuite 常用类型Item对应Account异同
NetSuite中会有多种类型不同的Item,在期初数据收集的时候我们一般也会让用户提供给我们Item的主数据信息,其中就包含科目部分,但不同类型Item对应科目不完全相同,所以就想帮助自己和各位一起来梳理一下相关内容。 一般我们常用It…...

CentOS配置了镜像源之后依旧下载元数据失败
// 切换到root用户 su root备份原有的镜像源 sudo mv /etc/yum.repos.d/CentOS-Base.repo /etc/yum.repos.d/CentOS-Base.repo.backup使用阿里云镜像源 sudo wget -O /etc/yum.repos.d/CentOS-Base.repo http://mirrors.aliyun.com/repo/Centos-vault-8.5.2111.repo这是清华的…...

mybatis 的多表查询
文章目录 多表查询一对一一对多 多表查询 一对一 开启代码片段编写 专注于 SQL的 编写 JDBC 的写法,注重于 SQL mybatis 在 一对一查询时,核心在于 建立每个表对应的实体类主键根据 主键 id 进行查询,副标根据 设定外键进行查询 在 SQL编写…...
-神经网络参数初始化-之自注意力机制为什么除以根号d而不是2*根号d或者3*根号d)
面试常问系列(一)-神经网络参数初始化-之自注意力机制为什么除以根号d而不是2*根号d或者3*根号d
首先先罗列几个参考文章,大家之后可以去看看,加深理解: 面试常问系列(一)-神经网络参数初始化面试常问系列(一)-神经网络参数初始化之自注意力机制_注意力机制的参数初始化怎么做-CSDN博客面试常问系列(一)-神经网络参数初始化-之-softmax-C…...

Linux服务之nginx中http设置及虚拟主机搭建
目录 一.http相关概述 1.mime 2.server下的listen及root 2.1 listen 2.2 root 3.alias别名 4.location相关概述 4.1 语法规则初步解释 5.access模块 6.验证模块 6.1 htpasswd 7.自定义错误页面 8.虚拟主机搭建 (yum安装) 一.http相关概述 h…...
: 从库文件反推ndk版本)
android-ndk开发(7): 从库文件反推ndk版本
android-ndk开发(7): 从库文件反推ndk版本 2025/05/06 1. 概要 对于动态库, 有些能用 parse_elfnote.py 提取,有些不能。 对于静态库, 不能用 parse_elfnote.py 提取; 对于 libopencv_core.a, 可以搜索关键字 General configu…...
并去重返回)
MySQL8查询某个JSON类型的字段中出现过的所有键名(json key name)并去重返回
假设我有一张表叫 t1, 其中有一个字段 info 是 JSON类型,现在我想查询 t1.info 字段中出现过的所有键名,MySQL提供了一个函数 JSON_KEYS(column) 来返回单条数据单个JSON字段中的所有键名组成的集合,那我想查询整个表所有记录中某个JSON字段出…...
)
【AI】基于生活案例的LLM强化学习(入门帖)
一、从“教小孩说话”到“教模型说话”:LLM 训练全貌 1. 先打个比方 第一阶段:预训练 就好比教一个小孩先“读很多书”,让他获得基本的语言能力。对 LLM 来说,就是在海量文本上进行“预测下一个词”的训练,从而学到“…...

如何通过代理 IP 实现异地直播推流
在直播行业日益火爆的今天,许多主播希望突破地域限制,实现异地直播推流,以获得更广泛的观众群体和更好的直播效果。代理 IP 作为一种有效的网络工具,能够帮助主播轻松达成这一目标。本文将详细介绍如何通过代理 IP 实现异地直播推…...

Linux 网络编程 day5 多路IO转接之改进select and poll
三种多路IO转接方法:select , poll , epoll 改进select多路IO转接,使用数组来保存含有需要连接的套接字cfd,不用循环至1024,节约时间提高效率。 #include<stdio.h> #include<stdlib.h> #in…...
——NSObject的alloc源码)
【iOS】源码阅读(二)——NSObject的alloc源码
文章目录 前言问题发现探索NSObject的alloc源码实现流程探索NSObject为什么直接走objc_alloc,而GGObject先走alloc总结 前言 前面笔者已经学习了alloc相关源码,之前的alloc底层源码实现步骤是以GGObject为基础的,今天我们来探索一下NSObject中…...

如何在短时间内高效复习食品安全员考试?
以下是一些在短时间内高效复习食品安全员考试的方法: 制定科学计划:根据剩余时间和考试内容,将备考时间划分为基础学习、强化巩固和模拟冲刺三个阶段。如基础学习阶段可安排每天学习 2-3 小时,梳理教材知识;强化巩固阶…...

Kotlin空安全解决Android NPE问题
在 Android 开发中,NullPointerException(NPE)一直是最常见的崩溃类型之一。Kotlin 通过创新的空安全机制,在语言层面彻底解决了这一问题。以下是 Kotlin 空安全的核心要点和实战指南: 一、Kotlin 空安全设计哲学 编译期防御:通过类型系统强制区分可空(?)与非空类型显…...

PrimExpr 与 RelayExpr 的区别
PrimExpr 与 RelayExpr 的区别解析 在 TVM 的表达式系统中,PrimExpr 和 RelayExpr 是两种不同层级的表达式类型,分别服务于 TVM 的不同编译阶段和目标场景。以下是它们的核心区别和关联: 1. 设计目标与层级 特性PrimExprRelayExpr所属层级TV…...

R语言助力森林生态研究:从数据处理到群落稳定性分析的完整流程,结合机器学习与案例写作
在生态学研究中,森林生态系统的结构、功能与稳定性是核心研究内容之一。这些方面不仅关系到森林动态变化和物种多样性,还直接影响森林提供的生态服务功能及其应对环境变化的能力。 👉 森林生态系统的结构、功能与稳定性是生态学研究的核心。…...
: ndk 和 clang 版本对照表)
android-ndk开发(8): ndk 和 clang 版本对照表
android-ndk开发(8): ndk 和 clang 版本对照表 2025/05/06 1. 概要 android-ndk 是基于 clang 的编译工具链。 当 clang 自身的版本变更导致了普通用户的编译、链接报错时, 用户可能只关注到了 ndk 版本, 导致问题的分析浮于表面。 android-ndk 官方…...
实践)
《AI大模型应知应会100篇》第50篇:大模型应用的持续集成与部署(CI/CD)实践
第50篇:大模型应用的持续集成与部署(CI/CD)实践 🧾 摘要 在AI大模型开发中,随着模型版本迭代频繁、依赖复杂、部署环境多样,构建一套高效可靠的持续集成与持续交付(CI/CD)流程显得尤…...

Python基于Django的在线考试系统【附源码、文档说明】
博主介绍:✌Java老徐、7年大厂程序员经历。全网粉丝12w、csdn博客专家、掘金/华为云/阿里云/InfoQ等平台优质作者、专注于Java技术领域和毕业项目实战✌ 🍅文末获取源码联系🍅 👇🏻 精彩专栏推荐订阅👇&…...
 运行窗口 shell:startup 指令调出开机自启文件夹)
windows操作系统开机自启(自动启动) 运行窗口 shell:startup 指令调出开机自启文件夹
打开 “运行” 窗口,输入 shell:startup 把需要开机自启程序的快捷启动方式复制到启动文件夹 (注意:一定要复制快捷启动方式,可以右键启动的文件,发送到桌面快捷方式,如果直接把启动的文件放进去ÿ…...

笔记本外接显示器检测不到hdmi信号
原因:AMD显卡驱动挂了。 其他 异常特征:显示亮度被禁用,无法调整。 修复步骤: ① ②点击更新驱动程序...