排序算法详解笔记
评价维度
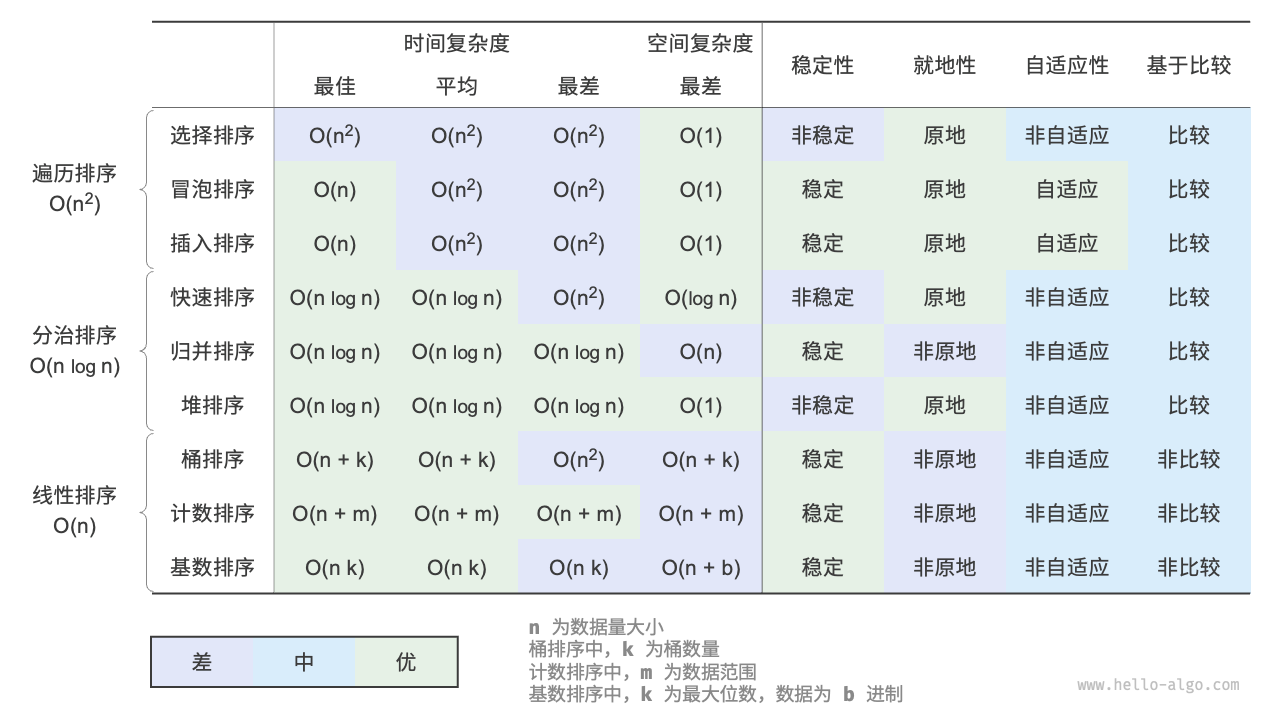
- 运行效率
- 就地性
- 稳定性
自适应性:自适应排序能够利用输入数据已有的顺序信息来减少计算量,达到更优的时间效率。自适应排序算法的最佳时间复杂度通常优于平均时间复杂度。
是否基于比较:基于比较的排序依赖比较运算符(<、=、>)来判断元素的相对顺序,从而排序整个数组,理论最优时间复杂度为 O(nlogn) 。而非比较排序不使用比较运算符,时间复杂度可达 O(n) ,但其通用性相对较差。
非比较排序可以突破下界
如果都要比较,那比较次数也会影响性能,比较次数少性能就会好一点
比较排序 O(N^2)
选择排序
选择排序(selection sort)的工作原理非常简单:开启一个循环,每轮从未排序区间选择最小的元素,将其放到已排序区间的末尾。
设数组的长度为 n 。
- 初始状态下,所有元素未排序,即未排序(索引)区间为 [0,n−1] 。
- 选取区间 [0,n−1] 中的最小元素,将其与索引 0 处的元素交换。完成后,数组前 1 个元素已排序。
- 选取区间 [1,n−1] 中的最小元素,将其与索引 1 处的元素交换。完成后,数组前 2 个元素已排序。
- 以此类推。经过 n−1 轮选择与交换后,数组前 n−1 个元素已排序。
- 仅剩的一个元素必定是最大元素,无须排序,因此数组排序完成。
/* 选择排序 */
void selectionSort(vector<int> &nums) {int n = nums.size();// 外循环:未排序区间为 [i, n-1]for (int i = 0; i < n - 1; i++) {// 内循环:找到未排序区间内的最小元素int k = i;for (int j = i + 1; j < n; j++) {if (nums[j] < nums[k])k = j; // 记录最小元素的索引}// 将该最小元素与未排序区间的首个元素交换swap(nums[i], nums[k]);}
}
- 时间复杂度为 O(n^2)、非自适应排序:外循环共 n−1 轮,第一轮的未排序区间长度为 n ,最后一轮的未排序区间长度为 2 ,即各轮外循环分别包含 n、n−1、…、3、2 轮内循环,求和为 (n−1)(n+2) 。
- 空间复杂度为 O(1)、==原地排序==:指针 i 和 j 使用常数大小的额外空间。
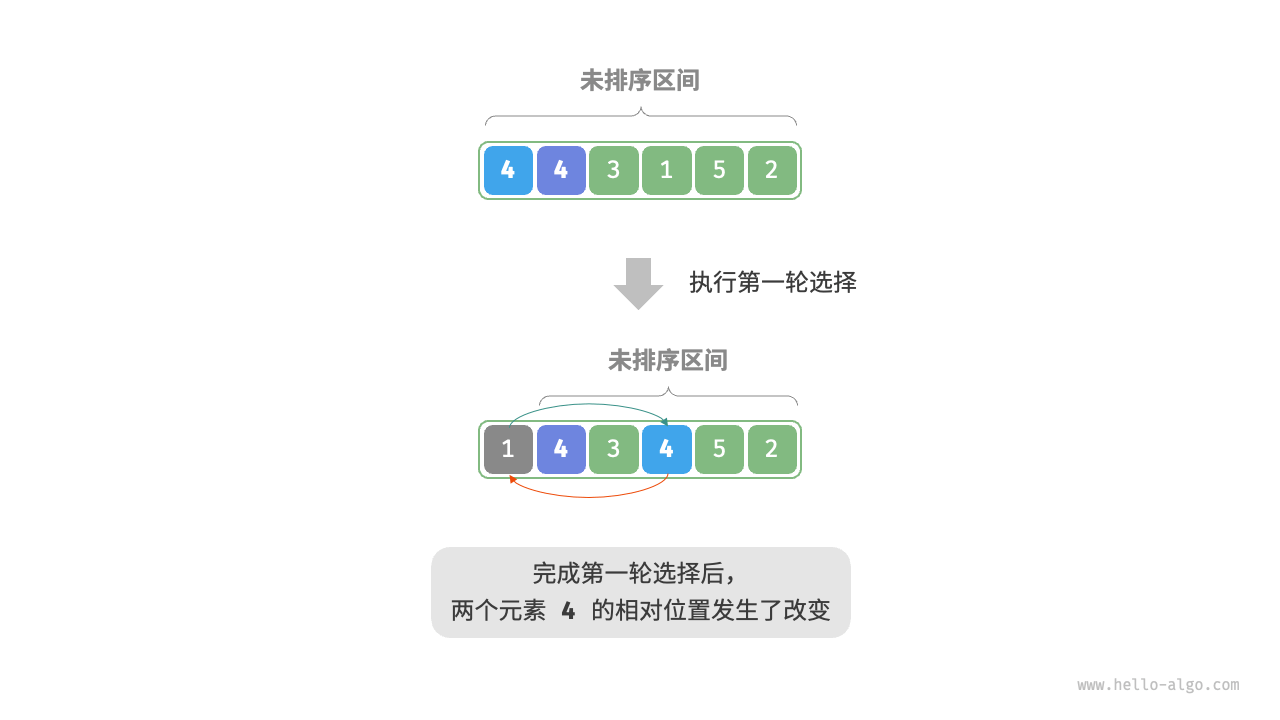
- 非稳定排序:如下图所示,元素
nums[i]有可能被交换至与其相等的元素的右边,导致两者的相对顺序发生改变。
冒泡排序 O(N^2)
冒泡排序(bubble sort)通过连续地比较与交换相邻元素实现排序。这个过程就像气泡从底部升到顶部一样,因此得名冒泡排序。
冒泡过程可以利用元素交换操作来模拟:从数组最左端开始向右遍历,依次比较相邻元素大小,如果“左元素 > 右元素”就交换二者。遍历完成后,最大的元素会被移动到数组的最右端。
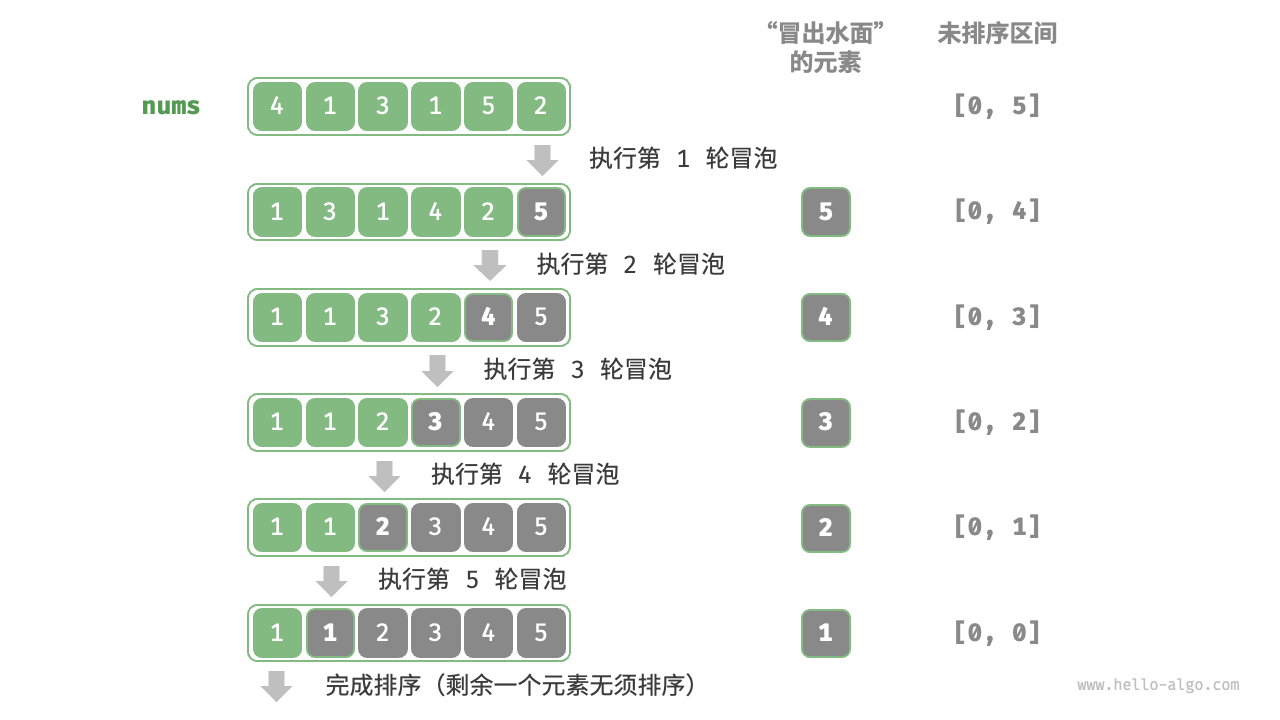
设数组的长度为 n ,冒泡排序的步骤如图 所示。
- 首先,对 n 个元素执行“冒泡”,将数组的最大元素交换至正确位置。
- 接下来,对剩余 n−1 个元素执行“冒泡”,将第二大元素交换至正确位置。
- 以此类推,经过 n−1 轮“冒泡”后,前 n−1 大的元素都被交换至正确位置。
- 仅剩的一个元素必定是最小元素,无须排序,因此数组排序完成。
void bubbleSort(vector<int> &nums){for(int i = nums.size()-1;i>0;i++){for(int j = 0;j<i;j++){if(nums[j]>nums[j+1]){swap(nums[j],nums[j+1]);}}}
}
引入flag优化
引入flag 优化
经过优化,冒泡排序的最差时间复杂度和平均时间复杂度仍为 𝑂(𝑛2) ;但当输入数组完全有序时,可达到最佳时间复杂度 𝑂(𝑛) 。
/* 冒泡排序(标志优化)*/
void bubbleSortWithFlag(vector<int> &nums) {// 外循环:未排序区间为 [0, i]for (int i = nums.size() - 1; i > 0; i--) {bool flag = false; // 初始化标志位// 内循环:将未排序区间 [0, i] 中的最大元素交换至该区间的最右端for (int j = 0; j < i; j++) {if (nums[j] > nums[j + 1]) {// 交换 nums[j] 与 nums[j + 1]// 这里使用了 std::swap() 函数swap(nums[j], nums[j + 1]);flag = true; // 记录交换元素}}if (!flag)break; // 此轮“冒泡”未交换任何元素,直接跳出}
}
- 时间复杂度为 O(n2)、自适应排序:各轮“冒泡”遍历的数组长度依次为 n−1、n−2、…、2、1 ,总和为 (n−1)n/2 。在引入
flag优化后,最佳时间复杂度可达到 O(n) 。 - 空间复杂度为 O(1)、原地排序:指针 i 和 j 使用常数大小的额外空间。
- 稳定排序:由于在“冒泡”中遇到相等元素不交换。
插入排序 O(N^2)
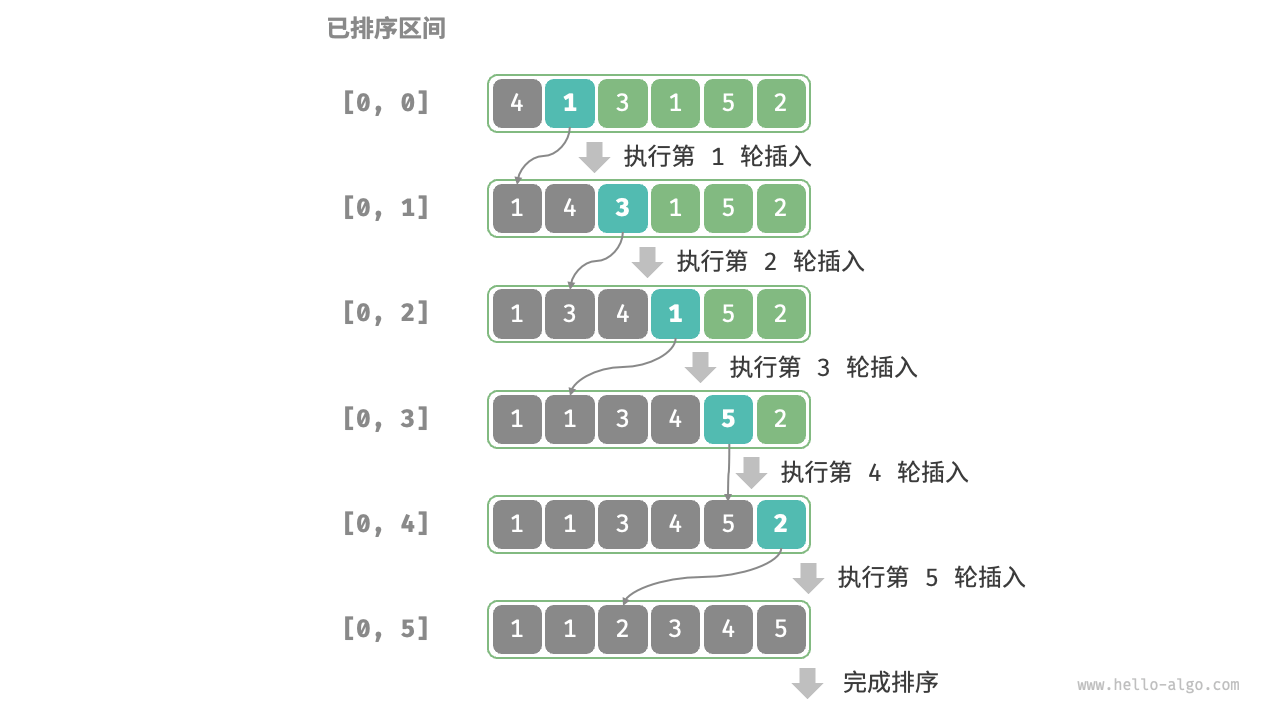
插入排序的整体流程。
- 初始状态下,数组的第 1 个元素已完成排序。
- 选取数组的第 2 个元素作为
base,将其插入到正确位置后,数组的前 2 个元素已排序。 - 选取第 3 个元素作为
base,将其插入到正确位置后,数组的前 3 个元素已排序。 - 以此类推,在最后一轮中,选取最后一个元素作为
base,将其插入到正确位置后,所有元素均已排序。
/* 插入排序 */
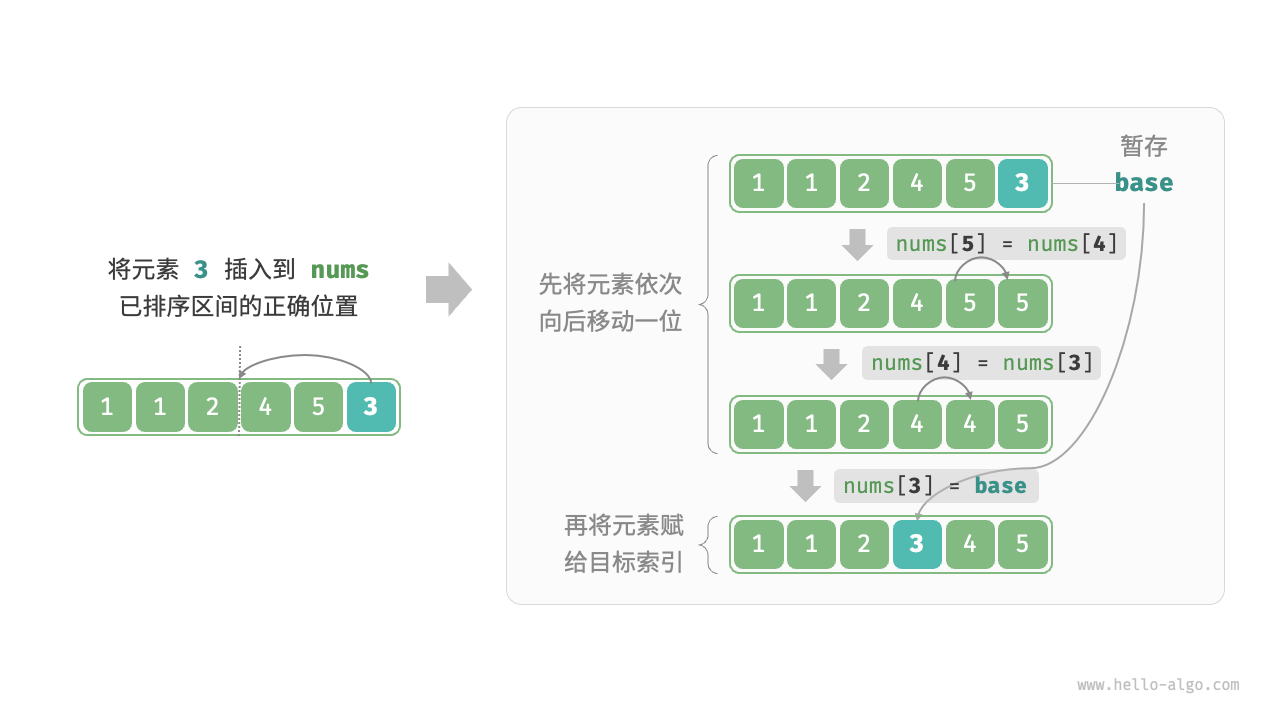
void insertionSort(vector<int> &nums) {// 外循环:已排序区间为 [0, i-1]for (int i = 1;i<nums.size();i++) {int base = nums[i],j = i-1;// 内循环:将 base 插入到已排序区间 [0, i-1] 中的正确位置while (j>=0&&nums[j]>base) {nums[j+1] = nums[j];j--;}// 将 base 赋值到正确位置nums[j+1] = base;}
}
- 时间复杂度为 O(n2)、自适应排序:在最差情况下,每次插入操作分别需要循环 n−1、n−2、…、2、1 次,求和得到 (n−1)n/2 ,因此时间复杂度为 O(n2) 。在遇到有序数据时,插入操作会提前终止。当输入数组完全有序时,插入排序达到最佳时间复杂度 O(n) 。
- 空间复杂度为 O(1)、原地排序:指针 i 和 j 使用常数大小的额外空间。
- 稳定排序:在插入操作过程中,我们会将元素插入到相等元素的右侧,不会改变它们的顺序。
优势
插入排序的时间复杂度为 O(n2) ,而我们即将学习的快速排序的时间复杂度为 O(nlogn) 。尽管插入排序的时间复杂度更高,但在数据量较小的情况下,插入排序通常更快。
这个结论与线性查找和二分查找的适用情况的结论类似。快速排序这类 O(nlogn) 的算法属于基于分治策略的排序算法,往往包含更多单元计算操作。而在数据量较小时,n2 和 nlogn 的数值比较接近,复杂度不占主导地位,每轮中的单元操作数量起到决定性作用。
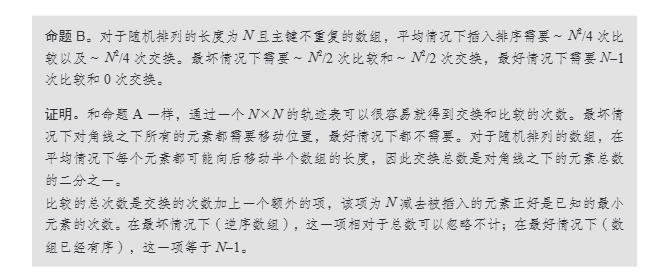
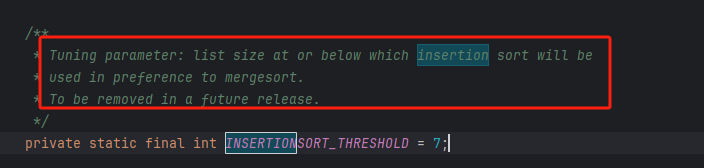
实际上,许多编程语言(例如 Java)的内置排序函数采用了插入排序,大致思路为:对于长数组,采用基于分治策略的排序算法,例如快速排序;对于短数组,直接使用插入排序。如下图所示。
/** * Tuning parameter: list size at or below which insertion sort will be * used in preference to mergesort. * To be removed in a future release. */private static final int INSERTIONSORT_THRESHOLD = 7; /** * Src is the source array that starts at index 0 * Dest is the (possibly larger) array destination with a possible offset * low is the index in dest to start sorting * high is the end index in dest to end sorting * off is the offset to generate corresponding low, high in src * To be removed in a future release. */@SuppressWarnings({"unchecked", "rawtypes"})
private static void mergeSort(Object[] src, Object[] dest, int low, int high, int off) { int length = high - low; // Insertion sort on smallest arrays if (length < INSERTIONSORT_THRESHOLD) { for (int i=low; i<high; i++) for (int j=i; j>low && ((Comparable) dest[j-1]).compareTo(dest[j])>0; j--) swap(dest, j, j-1); return; } // Recursively sort halves of dest into src int destLow = low; int destHigh = high; low += off; high += off; int mid = (low + high) >>> 1; mergeSort(dest, src, low, mid, -off); mergeSort(dest, src, mid, high, -off); // If list is already sorted, just copy from src to dest. This is an // optimization that results in faster sorts for nearly ordered lists. if (((Comparable)src[mid-1]).compareTo(src[mid]) <= 0) { System.arraycopy(src, low, dest, destLow, length); return; } // Merge sorted halves (now in src) into dest for(int i = destLow, p = low, q = mid; i < destHigh; i++) { if (q >= high || p < mid && ((Comparable)src[p]).compareTo(src[q])<=0) dest[i] = src[p++]; else dest[i] = src[q++]; }
}
虽然冒泡排序、选择排序和插入排序的时间复杂度都为 O(n2) ,但在实际情况中,插入排序的使用频率显著高于冒泡排序和选择排序,主要有以下原因。
- 冒泡排序基于元素交换实现,需要借助一个临时变量,共涉及 3 个单元操作;插入排序基于元素赋值实现,仅需 1 个单元操作。因此,冒泡排序的计算开销通常比插入排序更高。
- 选择排序在任何情况下的时间复杂度都为 O(n2) 。如果给定一组部分有序的数据,插入排序通常比选择排序效率更高。
- 选择排序不稳定,无法应用于多级排序。
快速排序 O(NlogN)
快速排序(quick sort)是一种基于分治策略的排序算法,运行高效,应用广泛。
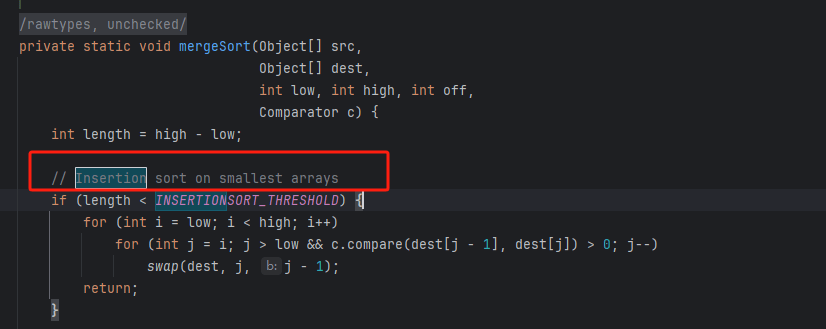
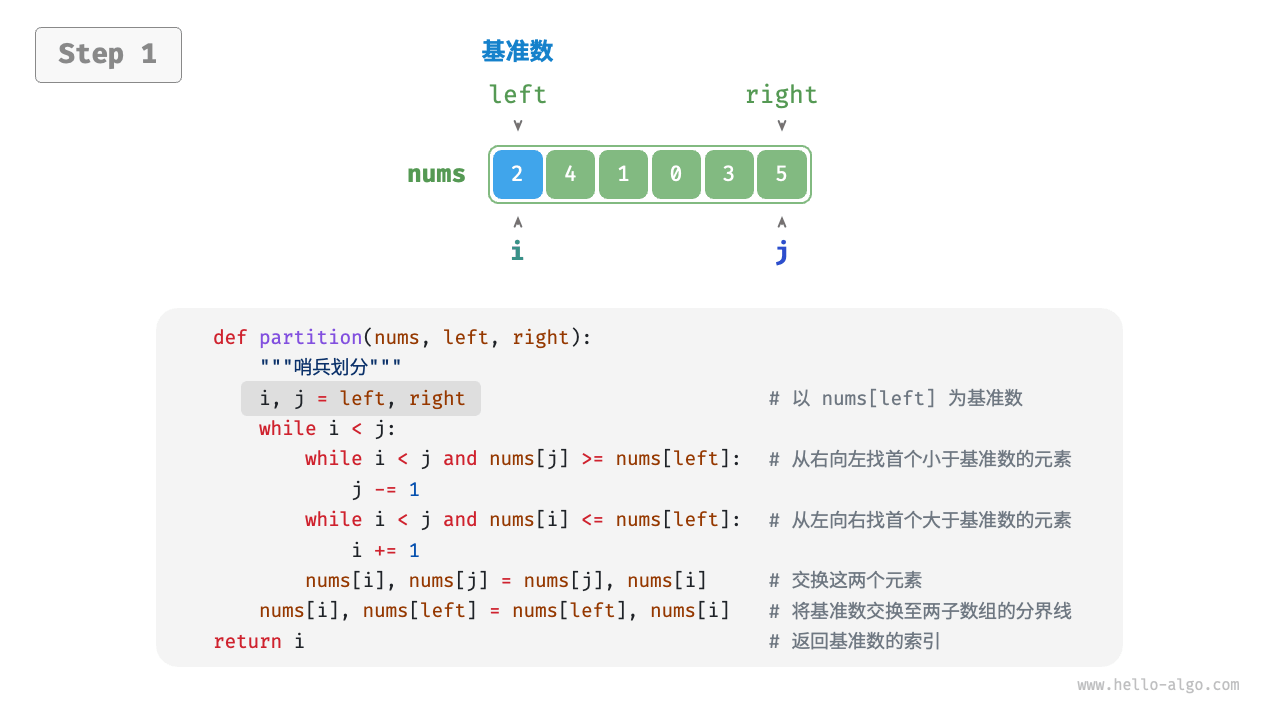
快速排序的核心操作是“哨兵划分”,其目标是:选择数组中的某个元素作为“基准数”,将所有小于基准数的元素移到其左侧,而大于基准数的元素移到其右侧。具体来说,哨兵划分的流程。
- 选取数组最左端元素作为基准数,初始化两个指针
i和j分别指向数组的两端。 - 设置一个循环,在每轮中使用
i(j)分别寻找第一个比基准数大(小)的元素,然后交换这两个元素。 - 循环执行步骤
2.,直到i和j相遇时停止,最后将基准数交换至两个子数组的分界线。
/* 哨兵划分 */
int partition(vector<int> &nums, int left, int right) {// 以 nums[left] 为基准数int i = left, j = right;while (i < j) {while (i < j && nums[j] >= nums[left])j--; // 从右向左找首个小于基准数的元素while (i < j && nums[i] <= nums[left])i++; // 从左向右找首个大于基准数的元素swap(nums[i], nums[j]); // 交换这两个元素}swap(nums[i], nums[left]); // 将基准数交换至两子数组的分界线return i; // 返回基准数的索引
}
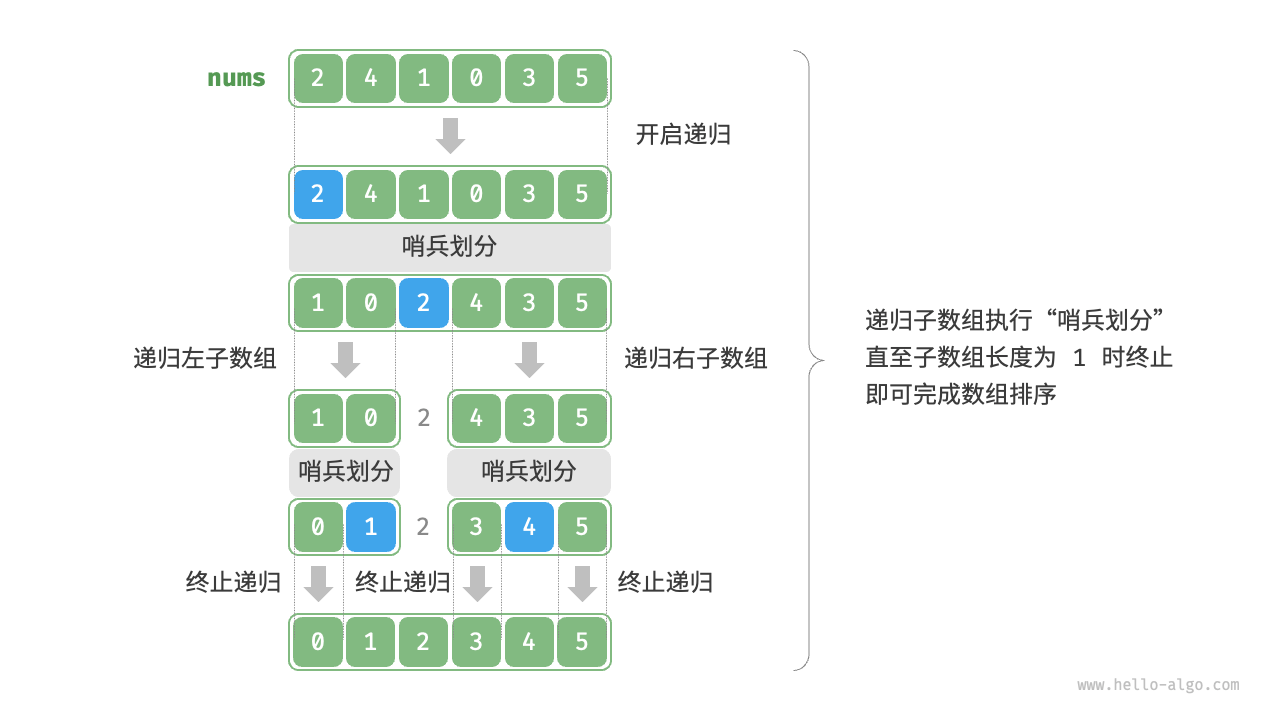
/* 快速排序 */
void quickSort(vector<int> &nums, int left, int right) {// 子数组长度为 1 时终止递归if (left >= right)return;// 哨兵划分int pivot = partition(nums, left, right);// 递归左子数组、右子数组quickSort(nums, left, pivot - 1);quickSort(nums, pivot + 1, right);
}
- 时间复杂度为 O(nlogn)、非自适应排序:在平均情况下,哨兵划分的递归层数为 logn ,每层中的总循环数为 n ,总体使用 O(nlogn) 时间。在最差情况下,每轮哨兵划分操作都将长度为 n 的数组划分为长度为 0 和 n−1 的两个子数组,此时递归层数达到 n ,每层中的循环数为 n ,总体使用 O(n2) 时间。
- 空间复杂度为 O(n)、原地排序:在输入数组完全倒序的情况下,达到最差递归深度 n ,使用 O(n) 栈帧空间。排序操作是在原数组上进行的,未借助额外数组。
- 非稳定排序:在哨兵划分的最后一步,基准数可能会被交换至相等元素的右侧。
优化
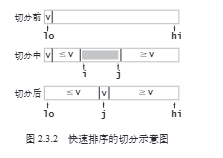
原始的切分:
- 对于某个j,a[j]已排定
- a[lo]到a[j-1]中的所有袁术都不大于a[j]
- a[j+1]到a[hi]中的所有元素都不小于a[j]
对于小数组,快速排序比插入排序慢
因为递归,快速排序在小数组中也会调用自己
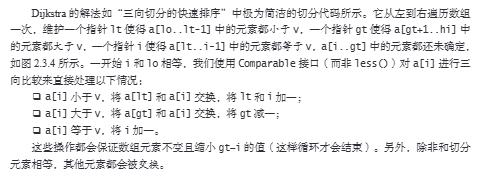
- 三取样切分
/* 选取三个候选元素的中位数 */
int medianThree(vector<int> &nums, int left, int mid, int right) {int l = nums[left], m = nums[mid], r = nums[right];if ((l <= m && m <= r) || (r <= m && m <= l))return mid; // m 在 l 和 r 之间if ((m <= l && l <= r) || (r <= l && l <= m))return left; // l 在 m 和 r 之间return right;
}/* 哨兵划分(三数取中值) */
int partition(vector<int> &nums, int left, int right) {// 选取三个候选元素的中位数int med = medianThree(nums, left, (left + right) / 2, right);// 将中位数交换至数组最左端swap(nums[left], nums[med]);// 以 nums[left] 为基准数int i = left, j = right;while (i < j) {while (i < j && nums[j] >= nums[left])j--; // 从右向左找首个小于基准数的元素while (i < j && nums[i] <= nums[left])i++; // 从左向右找首个大于基准数的元素swap(nums[i], nums[j]); // 交换这两个元素}swap(nums[i], nums[left]); // 将基准数交换至两子数组的分界线return i; // 返回基准数的索引
}
- 递归优化

在某些输入下,快速排序可能占用空间较多。以完全有序的输入数组为例,设递归中的子数组长度为 m ,每轮哨兵划分操作都将产生长度为 0 的左子数组和长度为 m−1 的右子数组,这意味着每一层递归调用减少的问题规模非常小(只减少一个元素),递归树的高度会达到 n−1 ,此时需要占用 O(n) 大小的栈帧空间。
为了防止栈帧空间的累积,我们可以在每轮哨兵排序完成后,比较两个子数组的长度,仅对较短的子数组进行递归。由于较短子数组的长度不会超过 n/2 ,因此这种方法能确保递归深度不超过 logn ,从而将最差空间复杂度优化至 O(logn) 。代码如下所示
/* 快速排序(尾递归优化) */
void quickSort(vector<int> &nums, int left, int right) {// 子数组长度为 1 时终止while (left < right) {// 哨兵划分操作int pivot = partition(nums, left, right);// 对两个子数组中较短的那个执行快速排序if (pivot - left < right - pivot) {quickSort(nums, left, pivot - 1); // 递归排序左子数组left = pivot + 1; // 剩余未排序区间为 [pivot + 1, right]} else {quickSort(nums, pivot + 1, right); // 递归排序右子数组right = pivot - 1; // 剩余未排序区间为 [left, pivot - 1]}}
}
- 三向切分
#include <vector>
using namespace std;// 交换函数
template<typename T>
void exch(vector<T>& a, int i, int j) {T temp = a[i];a[i] = a[j];a[j] = temp;
}// 插入排序
template<typename T>
void insertionSort(vector<T>& a, int lo, int hi) {for (int i = lo + 1; i <= hi; i++) {T temp = a[i];int j = i;while (j > lo && a[j-1] > temp) {a[j] = a[j-1];j--;}a[j] = temp;}
}// Bentley-McIlroy三向切分快速排序
template<typename T>
void quickSortBentleyMcIlroy(vector<T>& a, int lo, int hi, int M) {if (hi - lo + 1 <= M) {insertionSort(a, lo, hi);return;}int p = lo; // p指向等于pivot的左侧区域的右边界+1int q = hi; // q指向等于pivot的右侧区域的左边界-1int i = lo; // i指向小于pivot的区域的右边界+1int j = hi; // j指向大于pivot的区域的左边界-1T pivot = a[lo];while (i <= j) {// 处理小于pivot的元素while (i <= j && a[i] <= pivot) {if (a[i] == pivot) {exch(a, p, i);p++;}i++;}// 处理大于pivot的元素while (i <= j && a[j] >= pivot) {if (a[j] == pivot) {exch(a, j, q);q--;}j--;}if (i <= j) {exch(a, i, j);i++;j--;}}// 将左侧的等于pivot的元素移到中间int k = lo;while (k < p) {exch(a, k, j);k++;j--;}// 将右侧的等于pivot的元素移到中间k = hi;while (k > q) {exch(a, i, k);k--;i++;}// 递归排序左右两部分quickSortBentleyMcIlroy(a, lo, j, M);quickSortBentleyMcIlroy(a, i, hi, M);
}// 排序入口函数
template<typename T>
void sort(vector<T>& a, int M = 10) {quickSortBentleyMcIlroy(a, 0, a.size() - 1, M);
}
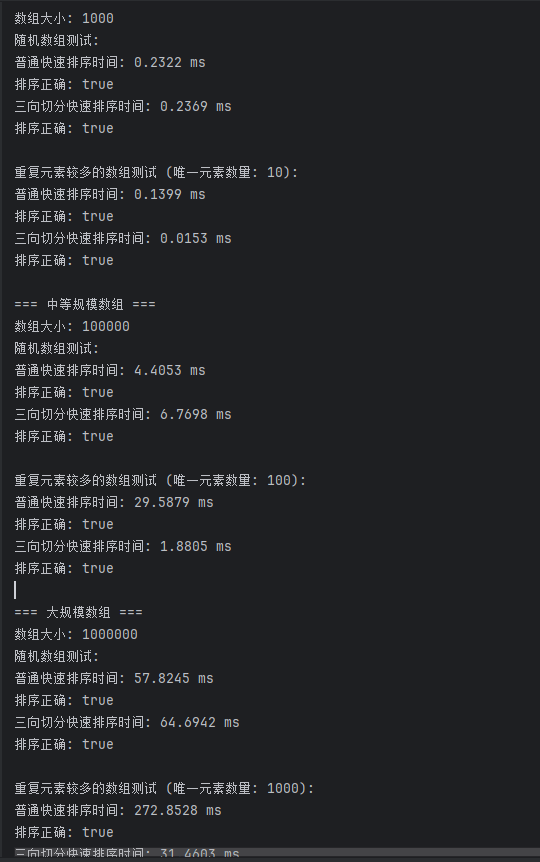
实验验证
小规模数组 (1000 个元素)
| 测试类型 | 普通快速排序 | 三向切分快速排序 | 速度比较 |
|---|---|---|---|
| 随机数组 | 0.2322 ms | 0.2369 ms | 普通快排略快 (1.02×) |
| 重复元素较多 (唯一元素数量: 10) | 0.1399 ms | 0.0153 ms | 三向快排明显更快 (9.14×) |
中等规模数组 (100,000 个元素)
| 测试类型 | 普通快速排序 | 三向切分快速排序 | 速度比较 |
|---|---|---|---|
| 随机数组 | 4.4053 ms | 6.7698 ms | 普通快排更快 (1.54×) |
| 重复元素较多 (唯一元素数量: 100) | 29.5879 ms | 1.8805 ms | 三向快排显著更快 (15.73×) |
大规模数组 (1,000,000 个元素)
| 测试类型 | 普通快速排序 | 三向切分快速排序 | 速度比较 |
|---|---|---|---|
| 随机数组 | 57.8245 ms | 64.6942 ms | 普通快排略快 (1.12×) |
| 重复元素较多 (唯一元素数量: 1000) | 272.8528 ms | 31.4603 ms | 三向快排极大提升 (8.67×) |
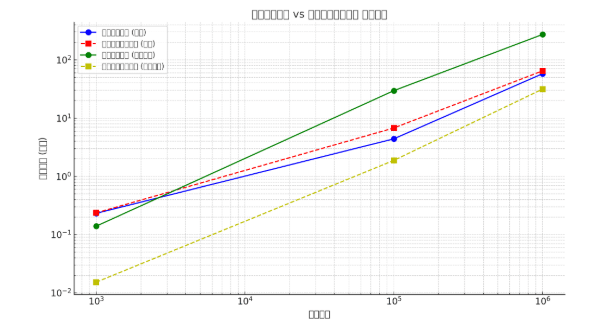
结论
- 随机数据:普通快速排序在所有规模上都略微快于三向切分快速排序
- 重复元素较多的数据:三向切分快速排序有巨大优势,在中等规模数组上最高可达15.73倍性能提升
- 数据规模影响:随着数据规模增大,处理重复元素时三向切分方法的优势愈发明显
在实际应用中,如果预期数据中重复元素较多,特别是在处理大规模数据时,三向切分快速排序会是更好的选择。
import java.util.Arrays;
import java.util.Random;public class QuickSortTest {// 普通快速排序public static void quickSort(int[] arr, int low, int high) {if (low < high) {int pivot = partition(arr, low, high);quickSort(arr, low, pivot - 1);quickSort(arr, pivot + 1, high);}}private static int partition(int[] arr, int low, int high) {int pivot = arr[high];int i = low - 1;for (int j = low; j < high; j++) {if (arr[j] <= pivot) {i++;swap(arr, i, j);}}swap(arr, i + 1, high);return i + 1;}// 三向切分的快速排序public static void quickSort3Way(int[] arr, int low, int high) {if (high <= low) return;int lt = low, i = low + 1, gt = high;int pivot = arr[low];while (i <= gt) {if (arr[i] < pivot) {swap(arr, lt++, i++);} else if (arr[i] > pivot) {swap(arr, i, gt--);} else {i++;}}quickSort3Way(arr, low, lt - 1);quickSort3Way(arr, gt + 1, high);}private static void swap(int[] arr, int i, int j) {int temp = arr[i];arr[i] = arr[j];arr[j] = temp;}// 生成随机数组private static int[] generateRandomArray(int size, int maxValue) {Random random = new Random();int[] arr = new int[size];for (int i = 0; i < size; i++) {arr[i] = random.nextInt(maxValue);}return arr;}// 生成有大量重复元素的数组private static int[] generateArrayWithDuplicates(int size, int uniqueCount) {Random random = new Random();int[] arr = new int[size];for (int i = 0; i < size; i++) {arr[i] = random.nextInt(uniqueCount);}return arr;}// 验证数组是否排序正确private static boolean isSorted(int[] arr) {for (int i = 1; i < arr.length; i++) {if (arr[i - 1] > arr[i]) {return false;}}return true;}// 运行测试private static void runTest(String testName, int size, int maxValue, int uniqueCount) {System.out.println("=== " + testName + " ===");System.out.println("数组大小: " + size);// 测试随机数组int[] arr1 = generateRandomArray(size, maxValue);int[] arr2 = Arrays.copyOf(arr1, arr1.length);System.out.println("随机数组测试:");// 测试普通快速排序long startTime = System.nanoTime();quickSort(arr1, 0, arr1.length - 1);long endTime = System.nanoTime();double duration = (endTime - startTime) / 1_000_000.0;System.out.println("普通快速排序时间: " + duration + " ms");System.out.println("排序正确: " + isSorted(arr1));// 测试三向切分快速排序startTime = System.nanoTime();quickSort3Way(arr2, 0, arr2.length - 1);endTime = System.nanoTime();duration = (endTime - startTime) / 1_000_000.0;System.out.println("三向切分快速排序时间: " + duration + " ms");System.out.println("排序正确: " + isSorted(arr2));// 测试大量重复元素的数组int[] arr3 = generateArrayWithDuplicates(size, uniqueCount);int[] arr4 = Arrays.copyOf(arr3, arr3.length);System.out.println("\n重复元素较多的数组测试 (唯一元素数量: " + uniqueCount + "):");// 测试普通快速排序startTime = System.nanoTime();quickSort(arr3, 0, arr3.length - 1);endTime = System.nanoTime();duration = (endTime - startTime) / 1_000_000.0;System.out.println("普通快速排序时间: " + duration + " ms");System.out.println("排序正确: " + isSorted(arr3));// 测试三向切分快速排序startTime = System.nanoTime();quickSort3Way(arr4, 0, arr4.length - 1);endTime = System.nanoTime();duration = (endTime - startTime) / 1_000_000.0;System.out.println("三向切分快速排序时间: " + duration + " ms");System.out.println("排序正确: " + isSorted(arr4));System.out.println();}public static void main(String[] args) {// 测试小规模数组runTest("小规模数组", 1000, 1000, 10);// 测试中等规模数组runTest("中等规模数组", 100000, 100000, 100);// 测试大规模数组runTest("大规模数组", 1000000, 1000000, 1000);}
}归并排序 O(NlogN)
“划分阶段”从顶至底递归地将数组从中点切分为两个子数组。
- 计算数组中点
mid,递归划分左子数组(区间[left, mid])和右子数组(区间[mid + 1, right])。 - 递归执行步骤
1.,直至子数组区间长度为 1 时终止。
“合并阶段”从底至顶地将左子数组和右子数组合并为一个有序数组。需要注意的是,从长度为 1 的子数组开始合并,合并阶段中的每个子数组都是有序的。
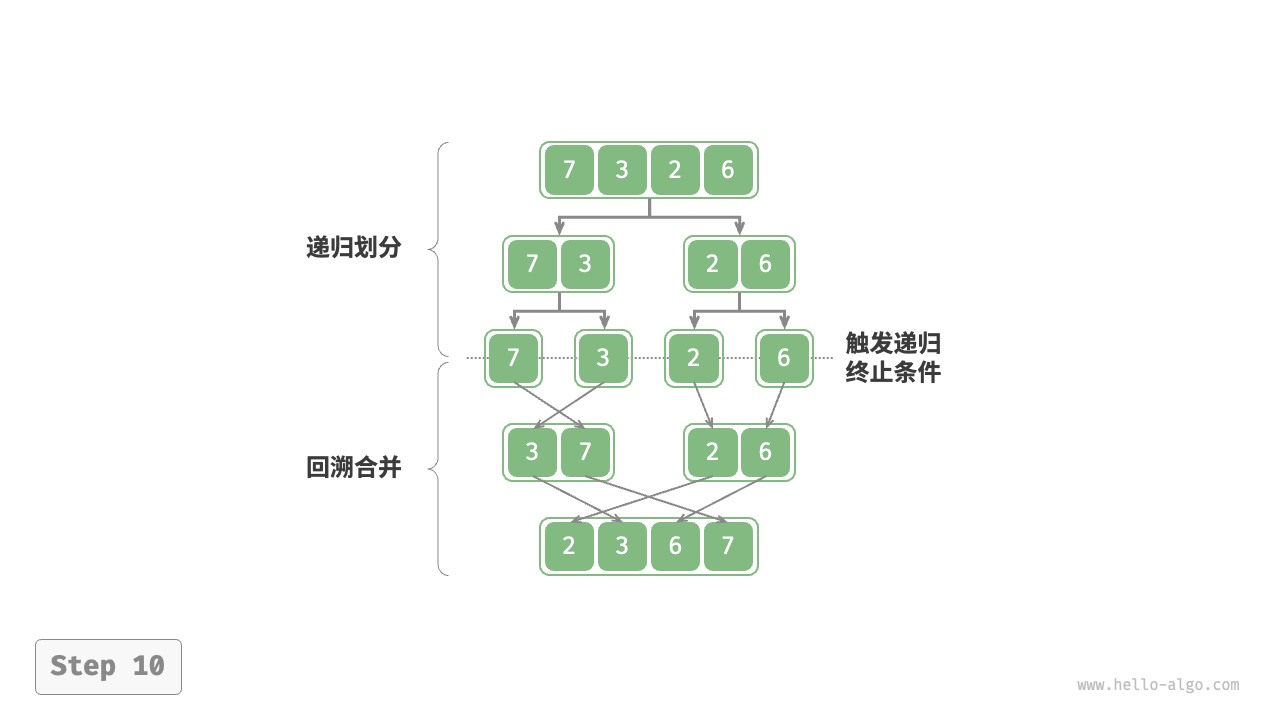
观察发现,归并排序与二叉树后序遍历的递归顺序是一致的。
- 后序遍历:先递归左子树,再递归右子树,最后处理根节点。
- 归并排序:先递归左子数组,再递归右子数组,最后处理合并。
归并排序的实现如以下代码所示。请注意,nums 的待合并区间为 [left, right] ,而 tmp 的对应区间为 [0, right - left] 。
/* 合并左子数组和右子数组 */
void merge(vector<int> &nums, int left, int mid, int right) {// 左子数组区间为 [left, mid], 右子数组区间为 [mid+1, right]// 创建一个临时数组 tmp ,用于存放合并后的结果vector<int> tmp(right - left + 1);// 初始化左子数组和右子数组的起始索引int i = left, j = mid + 1, k = 0;// 当左右子数组都还有元素时,进行比较并将较小的元素复制到临时数组中while (i <= mid && j <= right) {if (nums[i] <= nums[j])tmp[k++] = nums[i++];elsetmp[k++] = nums[j++];}// 将左子数组和右子数组的剩余元素复制到临时数组中while (i <= mid) {tmp[k++] = nums[i++];}while (j <= right) {tmp[k++] = nums[j++];}// 将临时数组 tmp 中的元素复制回原数组 nums 的对应区间for (k = 0; k < tmp.size(); k++) {nums[left + k] = tmp[k];}
}/* 归并排序 */
void mergeSort(vector<int> &nums, int left, int right) {// 终止条件if (left >= right)return; // 当子数组长度为 1 时终止递归// 划分阶段int mid = left + (right - left) / 2; // 计算中点mergeSort(nums, left, mid); // 递归左子数组mergeSort(nums, mid + 1, right); // 递归右子数组// 合并阶段merge(nums, left, mid, right);
}
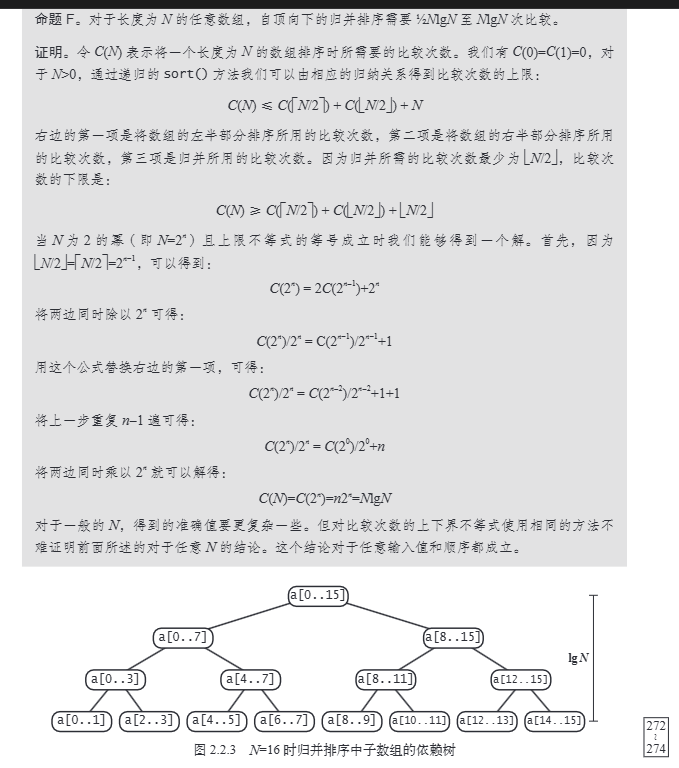
- 时间复杂度为 O(nlogn)、非自适应排序:划分产生高度为 logn 的递归树,每层合并的总操作数量为 n ,因此总体时间复杂度为 O(nlogn) 。
- 空间复杂度为 O(n)、非原地排序:递归深度为 logn ,使用 O(logn) 大小的栈帧空间。合并操作需要借助辅助数组实现,使用 O(n) 大小的额外空间。
- 稳定排序:在合并过程中,相等元素的次序保持不变。
对于链表,归并排序相较于其他排序算法具有显著优势,可以将链表排序任务的空间复杂度优化至 O(1) 。
- 划分阶段:可以使用“迭代”替代“递归”来实现链表划分工作,从而省去递归使用的栈帧空间。
- 合并阶段:在链表中,节点增删操作仅需改变引用(指针)即可实现,因此合并阶段(将两个短有序链表合并为一个长有序链表)无须创建额外链表。
#include <iostream>// 定义链表节点结构
struct ListNode {int val;ListNode* next;ListNode(int x) : val(x), next(nullptr) {}
};// 合并两个有序链表,返回合并后的头指针
ListNode* mergeTwoLists(ListNode* l1, ListNode* l2) {ListNode dummy(0);ListNode* tail = &dummy;while (l1 && l2) {if (l1->val < l2->val) {tail->next = l1;l1 = l1->next;} else {tail->next = l2;l2 = l2->next;}tail = tail->next;}tail->next = l1 ? l1 : l2;return dummy.next;
}// 计算链表长度
int getLength(ListNode* head) {int len = 0;while (head) {++len;head = head->next;}return len;
}// 非递归自底向上归并排序
ListNode* mergeSortList(ListNode* head) {if (!head || !head->next) return head;int n = getLength(head);ListNode dummy(0);dummy.next = head;ListNode* left;ListNode* right;ListNode* tail;for (int step = 1; step < n; step <<= 1) {ListNode* curr = dummy.next;tail = &dummy;while (curr) {left = curr;// 划分左子链表int leftSize = step;for (int i = 1; i < leftSize && curr->next; ++i) {curr = curr->next;}right = curr->next;curr->next = nullptr; // 切断左链表curr = right;// 划分右子链表int rightSize = step;for (int i = 1; i < rightSize && curr && curr->next; ++i) {curr = curr->next;}ListNode* nextSub = nullptr;if (curr) {nextSub = curr->next;curr->next = nullptr; // 切断右链表}// 合并左右链表ListNode* merged = mergeTwoLists(left, right);// 将合并后的部分链接回主链表tail->next = merged;while (tail->next) tail = tail->next;// 继续处理剩余部分curr = nextSub;}}return dummy.next;
}// 辅助:打印链表
void printList(ListNode* head) {while (head) {std::cout << head->val;if (head->next) std::cout << " -> ";head = head->next;}std::cout << std::endl;
}int main() {// 测试示例ListNode* head = new ListNode(4);head->next = new ListNode(2);head->next->next = new ListNode(1);head->next->next->next = new ListNode(3);head->next->next->next->next = new ListNode(2);std::cout << "排序前: ";printList(head);head = mergeSortList(head);std::cout << "排序后: ";printList(head);return 0;
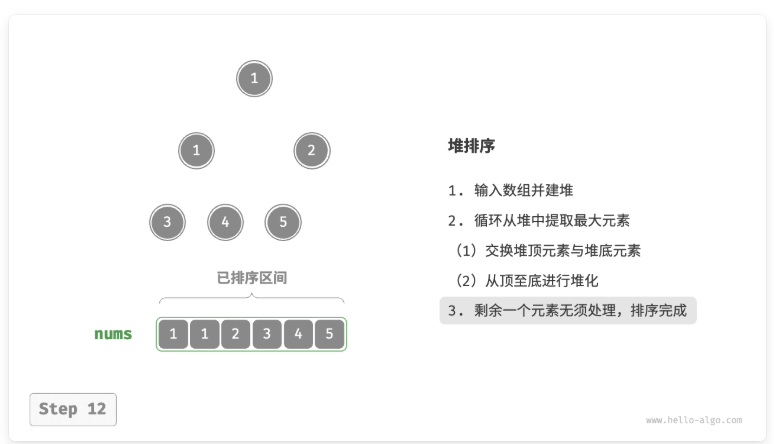
}堆排序 O(NlogN)
设数组的长度为 n ,堆排序的流程。
- 输入数组并建立大顶堆。完成后,最大元素位于堆顶。
- 将堆顶元素(第一个元素)与堆底元素(最后一个元素)交换。完成交换后,堆的长度减 1 ,已排序元素数量加 1 。
- 从堆顶元素开始,从顶到底执行堆化操作(sift down)。完成堆化后,堆的性质得到修复。
- 循环执行第
2.步和第3.步。循环 n−1 轮后,即可完成数组排序。
/* 堆的长度为 n ,从节点 i 开始,从顶至底堆化 */
void siftDown(vector<int> &nums, int n, int i) {while (true) {// 判断节点 i, l, r 中值最大的节点,记为 maint l = 2 * i + 1;int r = 2 * i + 2;int ma = i;if (l < n && nums[l] > nums[ma])ma = l;if (r < n && nums[r] > nums[ma])ma = r;// 若节点 i 最大或索引 l, r 越界,则无须继续堆化,跳出if (ma == i) {break;}// 交换两节点swap(nums[i], nums[ma]);// 循环向下堆化i = ma;}
}/* 堆排序 */
void heapSort(vector<int> &nums) {// 建堆操作:堆化除叶节点以外的其他所有节点for (int i = nums.size() / 2 - 1; i >= 0; --i) {siftDown(nums, nums.size(), i);}// 从堆中提取最大元素,循环 n-1 轮for (int i = nums.size() - 1; i > 0; --i) {// 交换根节点与最右叶节点(交换首元素与尾元素)swap(nums[0], nums[i]);// 以根节点为起点,从顶至底进行堆化siftDown(nums, i, 0);}
}
- 时间复杂度为 O(nlogn)、非自适应排序:建堆操作使用 O(n) 时间。从堆中提取最大元素的时间复杂度为 O(logn) ,共循环 n−1 轮。
- 空间复杂度为 O(1)、原地排序:几个指针变量使用 O(1) 空间。元素交换和堆化操作都是在原数组上进行的。
- 非稳定排序:在交换堆顶元素和堆底元素时,相等元素的相对位置可能发生变化。
非比较排序
桶排序
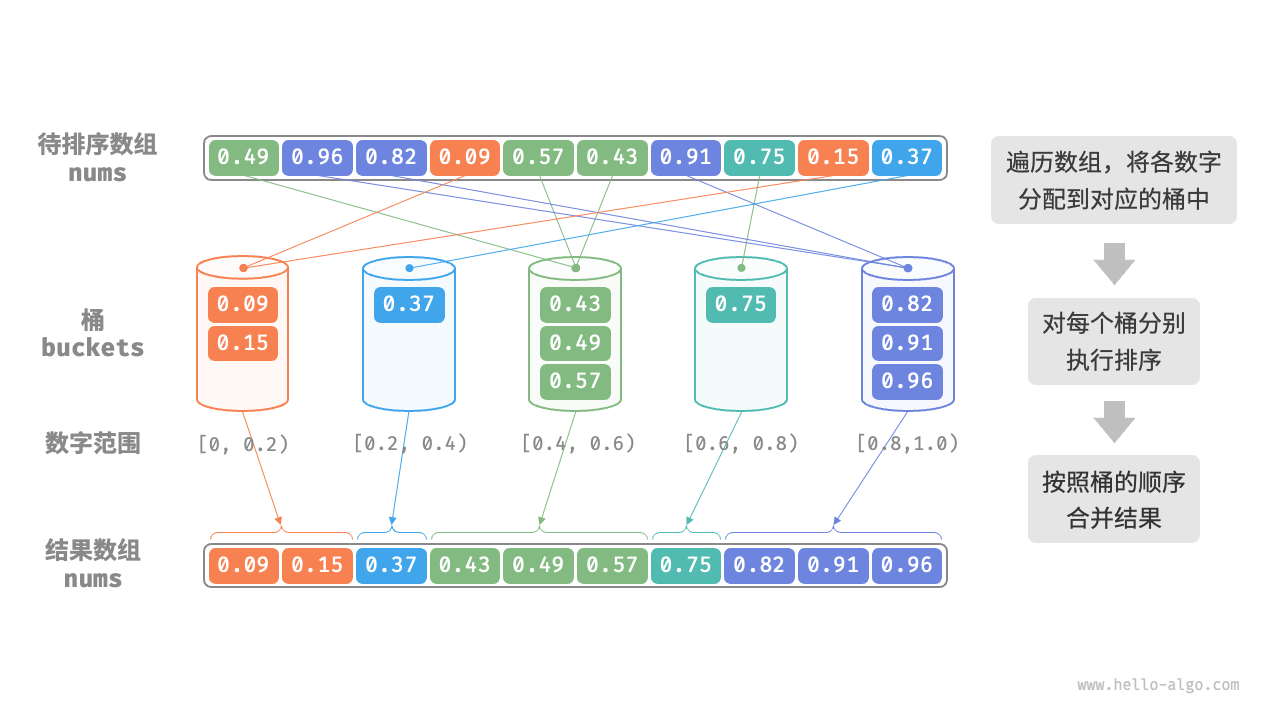
考虑一个长度为 n 的数组,其元素是范围 [0,1) 内的浮点数。桶排序的流程。
- 初始化 k 个桶,将 n 个元素分配到 k 个桶中。
- 对每个桶分别执行排序(这里采用编程语言的内置排序函数)。
- 按照桶从小到大的顺序合并结果。
数组元素 num 的取值区间是 [0,1),所以最简单直接的映射就是
int idx = static_cast<int>(num * k);
num * k会把 “0 → k” 这个区间线性映射到 [0, k),- 再取整 (
static_cast<int>或floor) 就得到合法的桶索引 0…k–1。
为了保险起见(万一有极小的浮点误差把 num*k 变成正好等于 k),可以再做一次上界截断:
int idx = std::min(static_cast<int>(num * k), k - 1);
buckets[idx].push_back(num);
如果输入范围不是固定在 [0,1),而是任意 [minVal, maxVal),那么对应的映射公式就是
int idx = static_cast<int>((num - minVal) / (maxVal - minVal) * k);
idx = std::min(std::max(idx, 0), k - 1);
这样就能将任意区间 [minVal, maxVal) 上的数均匀分配到 k 个桶里。
/* 桶排序 */
void bucketSort(vector<float> &nums) {// 初始化 k = n/2 个桶,预期向每个桶分配 2 个元素int k = nums.size() / 2;vector<vector<float>> buckets(k);// 1. 将数组元素分配到各个桶中for (float num : nums) {// 输入数据范围为 [0, 1),使用 num * k 映射到索引范围 [0, k-1]int i = num * k;// 将 num 添加进桶 bucket_idxbuckets[i].push_back(num);}// 2. 对各个桶执行排序for (vector<float> &bucket : buckets) {// 使用内置排序函数,也可以替换成其他排序算法sort(bucket.begin(), bucket.end());}// 3. 遍历桶合并结果int i = 0;for (vector<float> &bucket : buckets) {for (float num : bucket) {nums[i++] = num;}}
}
桶排序适用于处理体量很大的数据。例如,输入数据包含 100 万个元素,由于空间限制,系统内存无法一次性加载所有数据。此时,可以将数据分成 1000 个桶,然后分别对每个桶进行排序,最后将结果合并。
- 时间复杂度为 O(n+k) :假设元素在各个桶内平均分布,那么每个桶内的元素数量为 nk 。假设排序单个桶使用 O(nklognk) 时间,则排序所有桶使用 O(nlognk) 时间。当桶数量 k 比较大时,时间复杂度则趋向于 O(n) 。合并结果时需要遍历所有桶和元素,花费 O(n+k) 时间。在最差情况下,所有数据被分配到一个桶中,且排序该桶使用 O(n2) 时间。
- 空间复杂度为 O(n+k)、非原地排序:需要借助 k 个桶和总共 n 个元素的额外空间。
- 桶排序是否稳定取决于排序桶内元素的算法是否稳定。
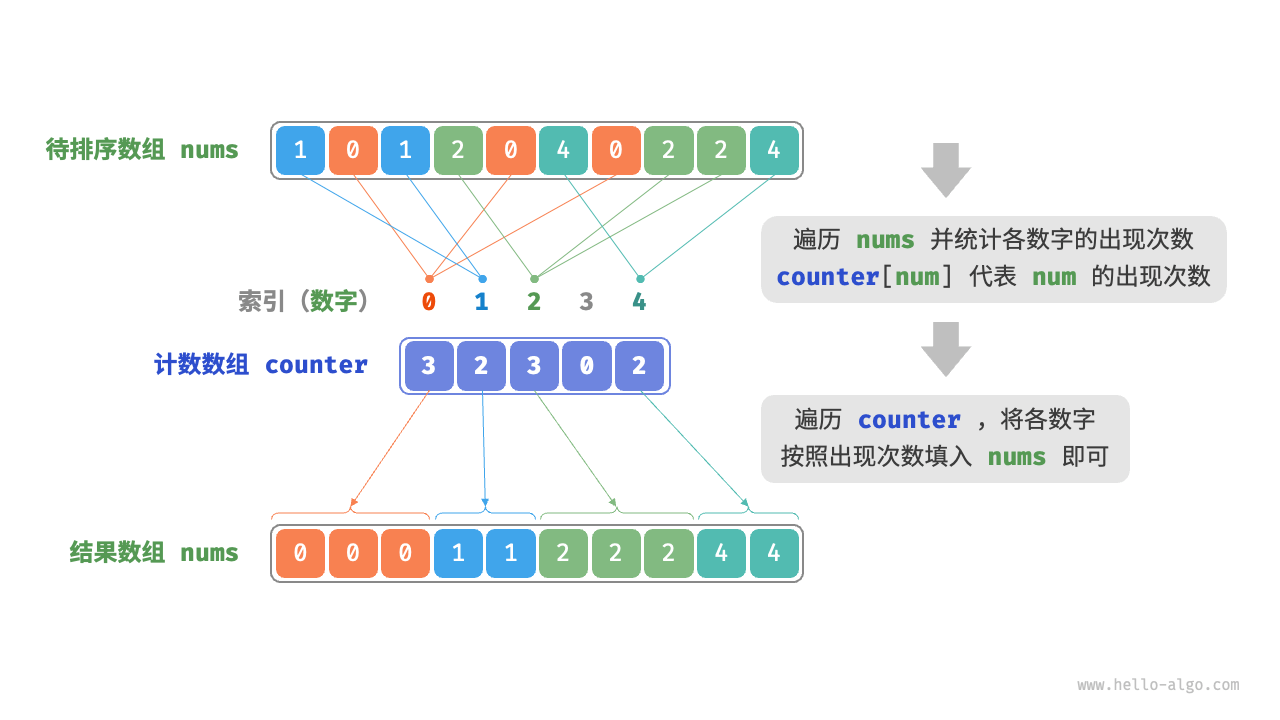
计数排序
计数排序(counting sort)通过统计元素数量来实现排序,通常应用于整数数组。
- 遍历数组,找出其中的最大数字,记为 m ,然后创建一个长度为 m+1 的辅助数组
counter。 - 借助
counter统计nums中各数字的出现次数,其中counter[num]对应数字num的出现次数。统计方法很简单,只需遍历nums(设当前数字为num),每轮将counter[num]增加 1 即可。 - 由于
counter的各个索引天然有序,因此相当于所有数字已经排序好了。接下来,我们遍历counter,根据各数字出现次数从小到大的顺序填入nums即可。
/* 计数排序 */
// 简单实现,无法用于排序对象
void countingSortNaive(vector<int> &nums) {// 1. 统计数组最大元素 mint m = 0;for (int num : nums) {m = max(m, num);}// 2. 统计各数字的出现次数// counter[num] 代表 num 的出现次数vector<int> counter(m + 1, 0);for (int num : nums) {counter[num]++;}// 3. 遍历 counter ,将各元素填入原数组 numsint i = 0;for (int num = 0; num < m + 1; num++) {for (int j = 0; j < counter[num]; j++, i++) {nums[i] = num;}}
}
- 时间复杂度为 O(n+m)、非自适应排序 :涉及遍历
nums和遍历counter,都使用线性时间。一般情况下 n≫m ,时间复杂度趋于 O(n) 。 - 空间复杂度为 O(n+m)、非原地排序:借助了长度分别为 n 和 m 的数组
res和counter。 - 稳定排序:由于向
res中填充元素的顺序是“从右向左”的,因此倒序遍历nums可以避免改变相等元素之间的相对位置,从而实现稳定排序。实际上,正序遍历nums也可以得到正确的排序结果,但结果是非稳定的。
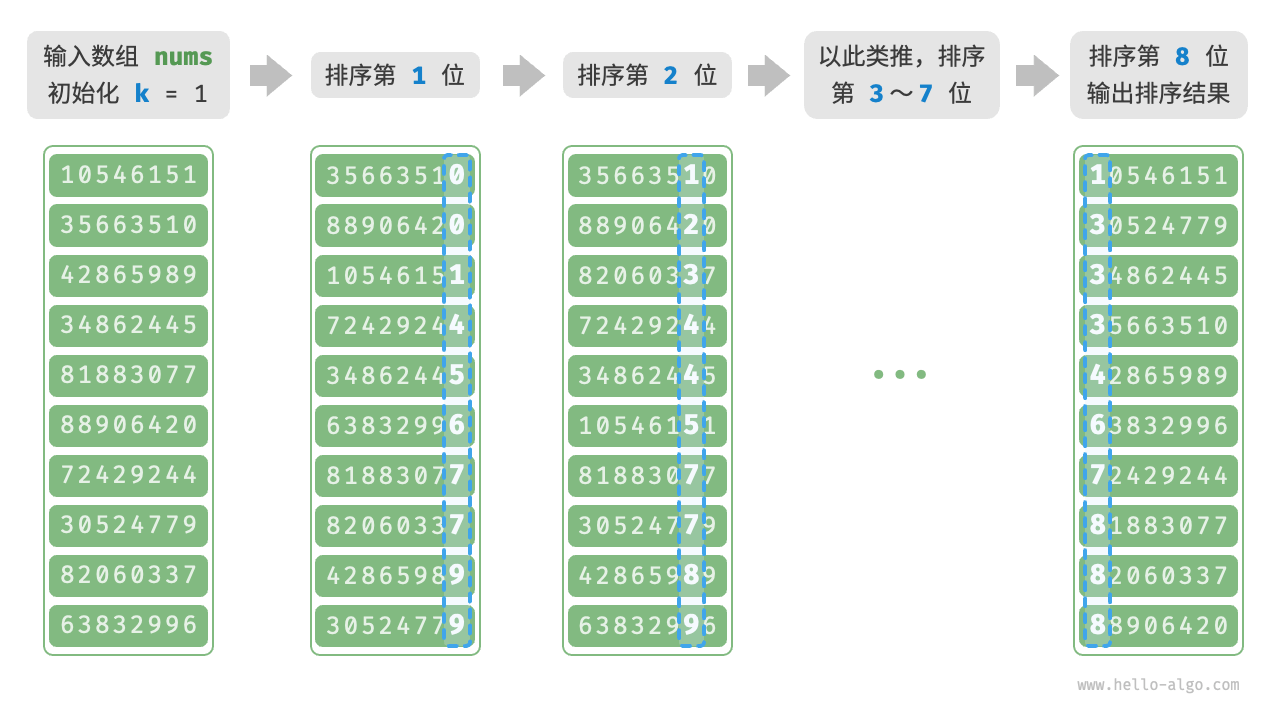
基数排序
以学号数据为例,假设数字的最低位是第 1 位,最高位是第 8 位,基数排序的流程如图 11-18 所示。
- 初始化位数 k=1 。
- 对学号的第 k 位执行“计数排序”。完成后,数据会根据第 k 位从小到大排序。
- 将 k 增加 1 ,然后返回步骤
2.继续迭代,直到所有位都排序完成后结束。
/* 获取元素 num 的第 k 位,其中 exp = 10^(k-1) */
int digit(int num, int exp) {// 传入 exp 而非 k 可以避免在此重复执行昂贵的次方计算return (num / exp) % 10;
}/* 计数排序(根据 nums 第 k 位排序) */
void countingSortDigit(vector<int> &nums, int exp) {// 十进制的位范围为 0~9 ,因此需要长度为 10 的桶数组vector<int> counter(10, 0);int n = nums.size();// 统计 0~9 各数字的出现次数for (int i = 0; i < n; i++) {int d = digit(nums[i], exp); // 获取 nums[i] 第 k 位,记为 dcounter[d]++; // 统计数字 d 的出现次数}// 求前缀和,将“出现个数”转换为“数组索引”for (int i = 1; i < 10; i++) {counter[i] += counter[i - 1];}// 倒序遍历,根据桶内统计结果,将各元素填入 resvector<int> res(n, 0);for (int i = n - 1; i >= 0; i--) {int d = digit(nums[i], exp);int j = counter[d] - 1; // 获取 d 在数组中的索引 jres[j] = nums[i]; // 将当前元素填入索引 jcounter[d]--; // 将 d 的数量减 1}// 使用结果覆盖原数组 numsfor (int i = 0; i < n; i++)nums[i] = res[i];
}/* 基数排序 */
void radixSort(vector<int> &nums) {// 获取数组的最大元素,用于判断最大位数int m = *max_element(nums.begin(), nums.end());// 按照从低位到高位的顺序遍历for (int exp = 1; exp <= m; exp *= 10)// 对数组元素的第 k 位执行计数排序// k = 1 -> exp = 1// k = 2 -> exp = 10// 即 exp = 10^(k-1)countingSortDigit(nums, exp);
}
相较于计数排序,基数排序适用于数值范围较大的情况,但前提是数据必须可以表示为固定位数的格式,且位数不能过大。例如,浮点数不适合使用基数排序,因为其位数 k 过大,可能导致时间复杂度 O(nk)≫O(n2) 。
- 时间复杂度为 O(nk)、非自适应排序:设数据量为 n、数据为 d 进制、最大位数为 k ,则对某一位执行计数排序使用 O(n+d) 时间,排序所有 k 位使用 O((n+d)k) 时间。通常情况下,d 和 k 都相对较小,时间复杂度趋向 O(n) 。
- 空间复杂度为 O(n+d)、非原地排序:与计数排序相同,基数排序需要借助长度为 n 和 d 的数组
res和counter。 - 稳定排序:当计数排序稳定时,基数排序也稳定;当计数排序不稳定时,基数排序无法保证得到正确的排序结果。
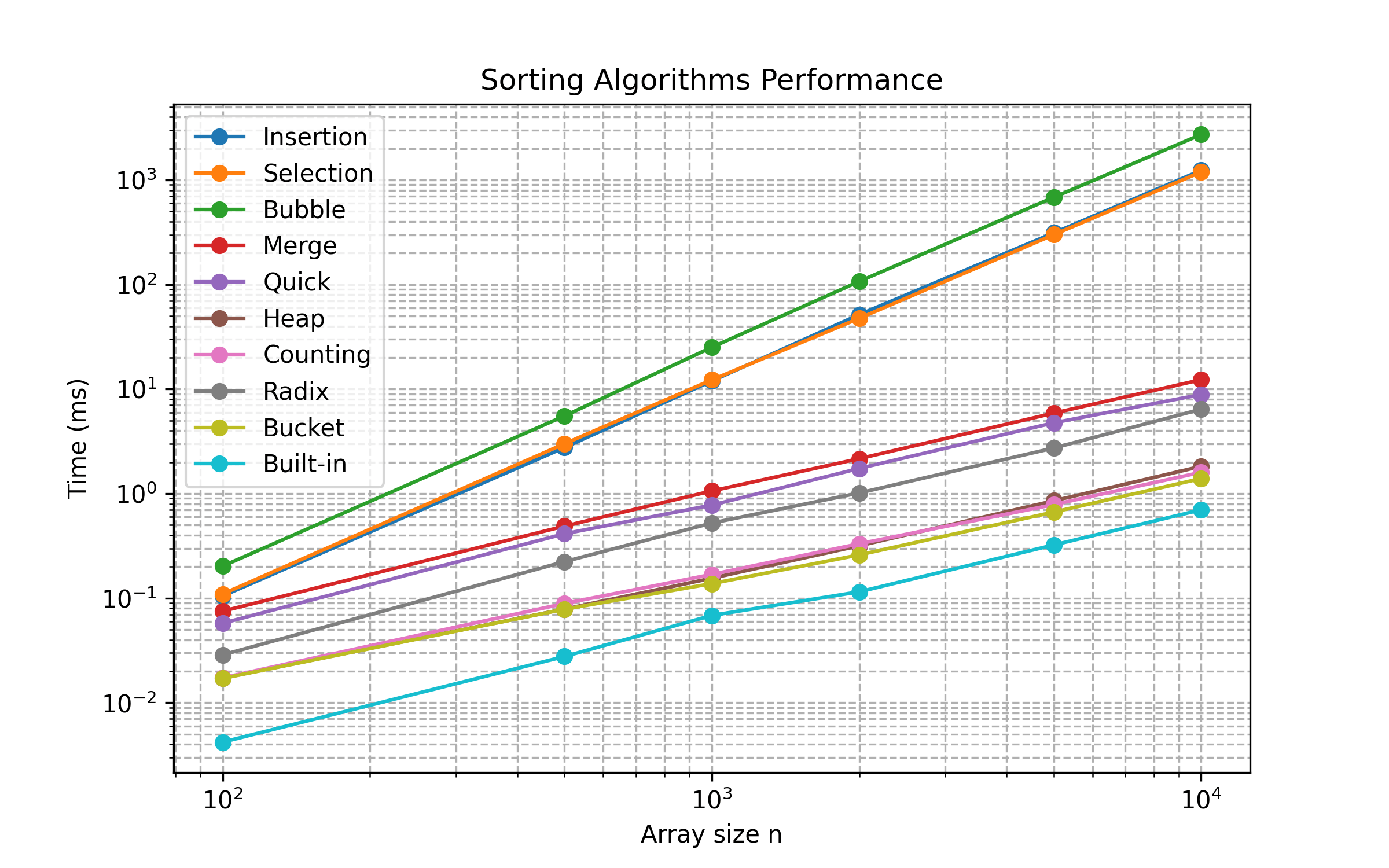
结论
import time
import random
import matplotlib
matplotlib.use('TkAgg') # 或 'TkAgg'import matplotlib.pyplot as plt # 10 common sorting algorithms
def insertion_sort(arr): a = arr.copy() for i in range(1, len(a)): key = a[i] j = i - 1 while j >= 0 and a[j] > key: a[j + 1] = a[j] j -= 1 a[j + 1] = key return a def selection_sort(arr): a = arr.copy() for i in range(len(a)): min_idx = i for j in range(i+1, len(a)): if a[j] < a[min_idx]: min_idx = j a[i], a[min_idx] = a[min_idx], a[i] return a def bubble_sort(arr): a = arr.copy() for i in range(len(a)): for j in range(len(a) - i - 1): if a[j] > a[j + 1]: a[j], a[j + 1] = a[j + 1], a[j] return a def merge_sort(arr): if len(arr) <= 1: return arr mid = len(arr) // 2 left = merge_sort(arr[:mid]) right = merge_sort(arr[mid:]) return merge(left, right) def merge(left, right): result = [] i = j = 0 while i < len(left) and j < len(right): if left[i] < right[j]: result.append(left[i]); i += 1 else: result.append(right[j]); j += 1 result.extend(left[i:]); result.extend(right[j:]) return result def quick_sort(arr): if len(arr) <= 1: return arr pivot = arr[0] less = [x for x in arr[1:] if x <= pivot] greater = [x for x in arr[1:] if x > pivot] return quick_sort(less) + [pivot] + quick_sort(greater) def heap_sort(arr): import heapq a = arr.copy() heapq.heapify(a) return [heapq.heappop(a) for _ in range(len(a))] def counting_sort(arr): if not arr: return arr min_val, max_val = min(arr), max(arr) count = [0] * (max_val - min_val + 1) for num in arr: count[num - min_val] += 1 res = [] for i, c in enumerate(count): res.extend([i + min_val] * c) return res def radix_sort(arr): if not arr: return arr def counting_radix(a, exp): output = [0]*len(a) count = [0]*10 for num in a: count[(num//exp) % 10] += 1 for i in range(1,10): count[i] += count[i-1] for num in reversed(a): idx = (num//exp) % 10 output[count[idx]-1] = num count[idx] -= 1 return output max_val = max(arr) exp = 1 a = arr.copy() while max_val // exp > 0: a = counting_radix(a, exp) exp *= 10 return a def bucket_sort(arr): if not arr: return arr min_val, max_val = min(arr), max(arr) bucket_count = 10 interval = (max_val - min_val) / bucket_count buckets = [[] for _ in range(bucket_count)] for num in arr: idx = int((num - min_val) / interval) if idx == bucket_count: idx -= 1 buckets[idx].append(num) res = [] for b in buckets: res.extend(sorted(b)) return res def builtin_sort(arr): return sorted(arr) # test parameters
sizes = [100, 500, 1000, 2000, 5000, 10000]
algos = [insertion_sort, selection_sort, bubble_sort, merge_sort, quick_sort, heap_sort, counting_sort, radix_sort, bucket_sort, builtin_sort]
names = ['Insertion', 'Selection', 'Bubble', 'Merge', 'Quick', 'Heap', 'Counting', 'Radix', 'Bucket', 'Built-in']
times = {n: [] for n in names} for n in sizes: arr = [random.randint(0, n) for _ in range(n)] for fn, nm in zip(algos, names): t0 = time.perf_counter() fn(arr) t1 = time.perf_counter() times[nm].append((t1 - t0)*1000) # plot
plt.figure(figsize=(8,5))
for nm in names: plt.plot(sizes, times[nm], marker='o', label=nm)
plt.xscale('log'); plt.yscale('log')
plt.xlabel('Array size n')
plt.ylabel('Time (ms)')
plt.title('Sorting Algorithms Performance')
plt.legend()
plt.grid(True, which='both', ls='--') # save to file to avoid backend issue
plt.savefig('sorting_performance.png', dpi=300)
print("Plot saved as sorting_performance.png") # optionally display
plt.show()
决定排序算法稳定性的关键因素
-
相等元素的比较和交换逻辑
-
稳定排序:当两个元素相等时,算法不会交换它们或改变它们的相对位置
-
不稳定排序:当两个元素相等时,算法可能会改变它们的相对位置
-
-
排序过程中元素移动/交换的方式
-
如果算法中的元素移动方式会导致相等元素的相对顺序发生变化,则该算法是不稳定的
-
特别是当算法进行跨距离的元素交换或移动时,更容易导致不稳定性
-
-
算法实现细节
-
有些算法(如快速排序)在标准实现中是不稳定的,但可以通过特定的修改变为稳定排序
-
这些修改通常会增加额外的时间或空间复杂度
-
稳定性分析
稳定的排序算法
1. 冒泡排序 (Bubble Sort)
-
稳定原因:只有当前一个元素严格大于后一个元素时才交换
-
代码中的体现:
if (arr[j] > arr[j+1]) swap(arr[j], arr[j+1]); -
关键判断:使用
>而非>=,确保相等元素不会被交换
for (int i = 0; i < n-1; i++) {for (int j = 0; j < n-i-1; j++) {// 只有当前元素大于后一个元素时才交换,保证稳定性if (arr[j] > arr[j+1]) { swap(arr[j], arr[j+1]);}}
}
2. 插入排序 (Insertion Sort)
- 稳定原因:在找插入位置时,相等元素不会继续向前查找
- 代码中的体现:
while (j >= 0 && arr[j] > key) { arr[j+1] = arr[j]; j--; } - 关键判断:使用
>而非>=,确保相等元素的相对顺序保持不变
for (int i = 1; i < n; i++) {int key = arr[i];int j = i - 1;// 关键:使用 > 而非 >=,确保当遇到相等元素时停止移动while (j >= 0 && arr[j] > key) {arr[j + 1] = arr[j];j--;}arr[j + 1] = key;
}
3. 归并排序 (Merge Sort)
- 稳定原因:合并两个已排序序列时,相等元素的选取有固定的顺序
- 代码中的体现:
if (arr[i] <= arr[j]) { temp[k++] = arr[i++]; } else { temp[k++] = arr[j++]; } - 关键判断:使用
<=而非<处理左侧数组元素,确保在相等时选择左侧元素
// 合并两个有序子数组的函数
void merge(int arr[], int left, int mid, int right) {// ... 初始化临时数组和指针 ...while (i <= mid && j <= right) {// 关键:使用 <= 确保在元素相等时优先选择左侧数组的元素// 这保证了相同元素的相对顺序不变if (arr[i] <= arr[j]) {temp[k++] = arr[i++];} else {temp[k++] = arr[j++];}}// ... 处理剩余元素 ...
}
4. 计数排序 (Counting Sort)
- 稳定原因:处理相同值的元素时按照它们在原始数组中出现的顺序
- 关键实现:从右向左扫描原数组并放入结果数组,或使用累加频率数组
void countingSort(int arr[], int n) {// ... 初始化计数数组和结果数组 ...// 计算每个元素的频率for (int i = 0; i < n; i++) {count[arr[i]]++;}// 计算累加频率for (int i = 1; i <= max; i++) {count[i] += count[i-1];}// 关键:从右向左遍历原数组,保证稳定性// 对于相同的元素,先出现的将被放置在较高位置for (int i = n-1; i >= 0; i--) {output[count[arr[i]]-1] = arr[i];count[arr[i]]--;}
}
不稳定的排序算法
1. 选择排序 (Selection Sort)
- 不稳定原因:可能会进行相隔较远的元素交换
- 关键问题代码:对找到的最小元素进行交换而非移动
for (int i = 0; i < n-1; i++) {int min_idx = i;for (int j = i+1; j < n; j++) {if (arr[j] < arr[min_idx]) {min_idx = j;}}// 问题点:这里的交换可能会改变相等元素的相对顺序// 例如[4,2,3,2,1]中,第一次交换后两个2的相对位置就变了swap(arr[i], arr[min_idx]);
}
2. 快速排序 (Quick Sort)
- 不稳定原因:分区过程中的交换可能改变相等元素的相对顺序
- 关键问题代码:分区函数中的元素交换
int partition(int arr[], int low, int high) {int pivot = arr[high];int i = low - 1;for (int j = low; j < high; j++) {if (arr[j] <= pivot) {i++;// 问题点:这里的交换可能会改变与pivot相等元素的相对顺序swap(arr[i], arr[j]);}}swap(arr[i+1], arr[high]);return i+1;
}
3. 堆排序 (Heap Sort)
- 不稳定原因:堆调整过程中的元素交换不考虑元素相等情况
- 关键问题代码:下沉操作中的交换
void heapify(int arr[], int n, int i) {int largest = i;int left = 2*i + 1;int right = 2*i + 2;if (left < n && arr[left] > arr[largest])largest = left;if (right < n && arr[right] > arr[largest])largest = right;if (largest != i) {// 问题点:这里的交换不考虑相等元素的原始顺序// 如果有多个子节点与父节点相等,选择哪个交换将影响稳定性swap(arr[i], arr[largest]);heapify(arr, n, largest);}
}
4. 希尔排序 (Shell Sort)
- 不稳定原因:跳跃式的比较和交换会打乱相等元素的相对顺序
- 关键问题代码:跨距离的插入排序
void shellSort(int arr[], int n) {for (int gap = n/2; gap > 0; gap /= 2) {for (int i = gap; i < n; i++) {int temp = arr[i];int j;// 问题点:由于gap大于1,相等元素可能会被错过或交换顺序for (j = i; j >= gap && arr[j-gap] > temp; j -= gap) {arr[j] = arr[j-gap];}arr[j] = temp;}}
}
使不稳定排序变为稳定排序的方法
-
附加索引信息
// 为元素添加原始位置信息 struct Element {int value;int originalIndex;// 比较运算符重载bool operator<(const Element& other) const {if (value == other.value)return originalIndex < other.originalIndex; // 保持原始顺序return value < other.value;} };void stableSort(int arr[], int n) {// 创建带索引的元素数组Element* elements = new Element[n];for (int i = 0; i < n; i++) {elements[i].value = arr[i];elements[i].originalIndex = i;}// 使用任意排序算法// 由于比较运算符的重载,相等元素将保持原始顺序sort(elements, elements + n);// 将排序结果复制回原数组for (int i = 0; i < n; i++) {arr[i] = elements[i].value;}delete[] elements; } -
修改比较逻辑
// 三路快排示例 - 处理相等元素以保持稳定性 void threeWayQuickSort(int arr[], int low, int high) {if (low >= high) return;int lt = low, gt = high;int pivot = arr[low];int i = low + 1;while (i <= gt) {if (arr[i] < pivot) {swap(arr[lt++], arr[i++]);} else if (arr[i] > pivot) {swap(arr[i], arr[gt--]);} else {// 相等元素不交换,保持原有顺序i++;}}threeWayQuickSort(arr, low, lt - 1);threeWayQuickSort(arr, gt + 1, high); }
稳定性的实际应用
稳定排序在以下情况特别重要:
-
多级排序
// 使用稳定排序实现多级排序 // 例如:按照分数排序,分数相同的按照学号排序 void multiLevelSort(Student students[], int n) {// 首先,按照学号排序(次要关键字)// 使用稳定的排序算法如归并排序mergeSort(students, 0, n-1, compareByStudentId);// 然后,按照分数排序(主要关键字)// 由于使用了稳定排序,分数相同的学生将保持按学号排序的顺序mergeSort(students, 0, n-1, compareByScore); } -
保留用户自定义顺序 在用户界面应用中,当多个元素具有相同优先级时,保持它们的原始排列顺序可以提供更一致的用户体验。
-
数据可视化和报表生成 当相等数据的显示顺序对用户体验有影响时,稳定排序可以确保一致的呈现方式,增强用户对数据的理解和分析。
现实排序库的实现 (o4mini)
在工业级、通用排序库里,最常见的组合是“归并(或归并变种)+小规模时用插入”,主要原因有以下几点:
1. 插入排序(Insertion Sort)在小规模或近乎有序时最快
- 低常数开销:插入排序的逻辑非常简单,几乎只做一趟向前比较/搬移。对于 n≤16 甚至更小的规模,其函数调用、递归或复杂分支带来的开销往往高于算法本身的比较和交换成本。
- 适应性强:对于已经“部分有序”的数据(例如几乎排好序的数组、或者只有少量乱序),插入排序能接近线性表现 O(n+f),而普通的 O(n log n) 算法就难以利用这点优势。
- 简单易实现、易优化:很容易写出分支预测友好、基于移动(memmove)的高性能版本。
因此主流的各种分治式排序(快速、归并、希尔、堆……)在分到一定阈值时,普遍会切换成插入排序来“收尾”。
2. 归并排序(Merge Sort)及其变种的优势
- 最坏时间复杂度稳定:总是 O(n log n),不会像快速排序那样在某些输入(例如几乎有序、极端分布)退化到 O(n²)。
- 稳定性:天然保持相等元素的相对先后次序。对于需要稳定排序(比如数据库多字段排序)几乎是唯一选择。
- 外部排序友好:归并可以在磁盘/SSD等外存上分批读写,很容易做 k 路归并;而其他比较排序就不那么自然。
- 易于并行化、多路归并:现代 CPU 的向量化、NUMA 内存架构,都能通过分块归并更好利用。
所以像 C++ 的 std::stable_sort 底层就是归并;Java、Python 等语言的内置稳定排序(Java 的 TimSort、Python 的 Timsort)都是在归并的基础上,又加入了对已有“递增/递减 runs” 的“天然合并”+“galloping”(快速跳跃)技术。
3. 为什么不广泛用“其他”算法?
- 快速排序(Quick Sort):常数因子小、平均最快,但最差 O(n²),需额外防护(随机化、三数取中、切换堆排序)才能保证线性对数级别。
- 堆排序(Heap Sort):最坏 O(n log n)、不占额外空间,但常数因子较大,内存访问不连贯,分支预测差,实际比归并/快速都慢。
- 希尔排序(Shell Sort):对一般类型不稳定,增量序列调优困难,对各种分布的普适性和可预测性不如归并/快速。
- 基数排序(Radix Sort):虽然能到 O(n) 级别,但对类型(整数、浮点)、键长度/位宽敏感,需要额外内存,不如归并在接口上通用。
4. 实际库里常见的“混合套路”
- C++
std::sort:典型的 Introsort ——先快速排序,若递归层数过深再切堆排序,分到小块时切插入排序。 - C++
std::stable_sort:归并排序+分块优化+插入排序收尾。 - Java
Arrays.sort(Object[])& Pythonlist.sort():都是 TimSort(归并+插入+“galloping”合并),利用已有有序片段,对典型数据集(部分排序、少量乱序)非常快。
TimSort
小结:
- 插入排序 ——「小规模/近乎有序最优,常数开销极小」。
- 归并(及变种) ——「最坏 O(n log n)、稳定、外部/并行友好、可利用已有 runs」。
- 其他算法 或要么在常数因子上不占优,要么最坏情况不够可靠,要么通用性不足。
- 因此成熟库都会把它们“拼”在一起,既能兼顾最坏情况的理论保证,又能在常见场景下跑出接近线性的超高性能。
参考
- hello算法
- 算法第四版
- TimSort
相关文章:

排序算法详解笔记
评价维度 运行效率就地性稳定性 自适应性:自适应排序能够利用输入数据已有的顺序信息来减少计算量,达到更优的时间效率。自适应排序算法的最佳时间复杂度通常优于平均时间复杂度。 是否基于比较:基于比较的排序依赖比较运算符(…...

喷泉码技术在现代物联网中的应用 设计
喷泉码技术在现代物联网中的应用 摘 要 喷泉码作为一种无速率编码技术,凭借其动态生成编码包的特性,在物联网通信中展现出独特的优势。其核心思想在于接收端只需接收到足够数量的任意编码包即可恢复原始数据,这种特性使其特别适用于动态信道和多用户场景。喷泉码的实现主要…...
)
LVDS系列10:Xilinx 7系可编程输入延迟(三)
这节继续讲解IDELAYE2和IDELAYCTRL的VARIABLE模式、VAR_LOAD模式和VAR_LOAD_PIPE模式的仿真测试; VARIABLE模式使用: VARIABLE模式需要使用INC和CE端口控制抽头值的递增递减变化; 测试代码如下: module top_7series_idelay( i…...

QT:自定义ComboBox
实现效果: 实现combobox的下拉框区域与item区域分开做UI交互显示。 支持4种实现效果,如下 效果一: 效果二: 效果三: 效果四: 实现逻辑: ui由一个toolbutton和combobox上下组合成,重点在于combobox。 我设置了4种枚举,ButtonWithComboBox对应效果一;OnlyButt…...

Python爬虫学习路径与实战指南 02
一、进阶技巧与工具 1、处理复杂反爬机制 验证码破解(谨慎使用): 简单图像验证码:使用 pytesseract(OCR识别) PIL 处理图像。 复杂验证码:考虑付费API(如打码平台)。 …...

Crawl4AI,智能体网络自动采集利器
Crawl是一个强大的工具,它赋予AI智能体更高的效率和准确性执行网络爬取和数据提取任务。其开源特性、AI驱动的能力和多功能性,使其成为构建智能且数据驱动智能体的宝贵资产,告别繁琐: 爬虫新宠 crawl4ai,数行代码搞定数据采集,AI …...

C语言实现卡ID启用排序
任务: typedef struct {uint8_t bindflag; uint8_t userCardNumber; //当前用户卡的数据uint32_t userCardId[7];//当前6个用户的卡ID }USER_NFC;结构体中bindflag从高到低的的高七位bit表示数组userCardId中低到高卡ID的启用禁用状态,userC…...
附源码)
html css js网页制作成品——HTML+CSS甜品店网页设计(4页)附源码
目录 一、👨🎓网站题目 二、✍️网站描述 三、📚网站介绍 四、🌐网站效果 五、🪓 代码实现 🧱HTML 六、🥇 如何让学习不再盲目 七、🎁更多干货 一、👨…...

漫反射实现+逐像素漫反射+逐像素漫反射实现
标准光照的构成结构 自发光:材质本身发出的光,模拟环境使用的光 漫反射光:光照在粗糙材质后,光的反射方向随机,还有一些光发生了折射,造成材质 表面没有明显的光斑。 高光反射光:光照到材质表面…...

nginx代理websocket时ws遇到仅支持域名访问的处理
最终改造点 proxy_set_header Host 这一行 未改之前遇到的问题: nginx 日志显示 https://aaa.bbbb.cn:7413 被解析成了 IP 地址,这通常是因为 DNS 解析的结果被缓存或某些中间层(如负载均衡器、防火墙等)将域名替换为 IP 地址。…...

具身智能:从理论突破到场景落地的全解析
一、具身智能:重新定义 “智能” 的物理边界 (一)概念本质与核心特征 具身智能(Embodied Intelligence)是人工智能与机器人学深度融合的前沿领域,其核心在于通过物理实体与环境的动态交互实现智能行为。区…...

用Postman验证IAM Token的实际操作
当我们需要用Postman发送一个最简单的请求去验证Token的时候我们该怎么办? 【一、步骤】 步骤1:打开Postman,新建一个GET请求 请求地址填: https://iam.cn-north-4.myhuaweicloud.com/v3/auth/projects 解释一下:…...

CH592/CH582 触摸按键应用开发实例讲解
一. 触摸原理介绍 1. 触摸按键电容产生原理 一般应用中,可用手指与触摸板的电容模型简化代替人体与触摸板的电容模型,如图所示。 沁恒微电子的电容触摸按键检测方案主要有以下两种: (1) 电流源充电方案。 低功耗蓝牙系列、通用系列 MCU 使…...

为什么选择有版权的答题pk小程序
选择有版权的答题PK小程序主要有以下原因: 一、避免法律风险 随着国家对知识产权保护力度的加大,使用无版权的答题PK小程序可能会引发侵权纠纷。一旦被原作者或版权方发现,使用者可能会面临法律诉讼,需要承担相应的法律责任&…...

Java生成微信小程序码及小程序短链接
使用wx-java-miniapp-spring-boot-starter 生成微信小程序码及小程序短链接 在pom.xml文件中引入依赖 <dependency><groupId>com.github.binarywang</groupId><artifactId>wx-java-miniapp-spring-boot-starter</artifactId><version>4.7…...

从普查到防控:ArcGIS洪水灾害全流程分析技术实战——十大专题覆盖风险区划/淹没制图/水文分析/洪水分析/淹没分析/项目交流,攻克防洪决策数据瓶颈!
🔍 防范未然的关键一步:洪水灾害普查是筑牢防洪安全防线的基础。通过全面普查,可以精准掌握洪水灾害的分布、频率和影响范围,为后续的防洪规划、资源调配和应急响应提供详实的数据支持。这有助于提前识别潜在的高风险区域…...

Ubuntu安装SRS流媒体服务
通过网盘分享的文件:srs 链接: https://pan.baidu.com/s/1tdnxxUWh8edcSnXrQD1uLQ?pwd0000 提取码: 0000 官网地址:Build | SRS 将百度网盘提供的srs 和 conf 下载或上传到指定服务器 # 安装需要的依赖包 sudo apt install -y cmake tclsh unzip gcc…...
解释器模式)
设计模式(行为型)解释器模式
定义 给定一个语言,定义它的文法的一种表示,并定义一个解释器,这个解释器使用该表示来解释语言中的句子。这意味着我们能够针对特定领域的问题,构建一套专属的语言体系,并通过解释器对使用该语言描述的问题进行解析和处…...

海外独立站VUE3加载优化
主要有几个明显问题 1. 请求数量太多(139 requests) 网页请求了*大量 JS 文件*(都是 index-xxxx.js),而且每个文件都比较小。 每次建立请求都有 TCP 连接开销(特别是 HTTP/1.1),导…...

关于windows API 的键鼠可控可测
相关函数解释 GetAsyncKeyState 是 Windows API 中的一个函数,用于判断某个虚拟键是否被按下。GetAsyncKeyState(VK_ESCAPE) 专门用于检测 Esc 键的状态。下面为你详细介绍其用法: 函数原型 cpp SHORT GetAsyncKeyState( int vKey ); 参数 vKey&a…...

普发ASM392EUV检漏仪维修说明手测内容可目录
普发ASM392EUV检漏仪维修说明手测内容可目录...

Python pip下载包及依赖到指定文件夹
要使用pip下载包及其所有依赖到指定文件夹,请按照以下步骤操作: 步骤说明 使用pip download命令:该命令用于下载包及其依赖而不安装。指定目标目录:通过-d或--dest参数设置下载路径。确保包含依赖:默认情况下会下载依…...

DIFY 又跟新了,来到 1.3.0 版本,看正文
欢迎来到 1.3.0 版本!添加了各种巧妙的功能、修复了错误,并带来了一些新功能: 一、核心亮点: 结构化输出 1、LLM 节点新增JSON Schema编辑器,确保大语言模型能够返回符合预设格式的JSON数据。这一功能有助于提升数据…...

凸包问题 Graham 扫描算法 MATLAB
算法要解决的问题 Graham 扫描算法要解决的问题是在给定一组二维平面上的点集时,找出能够完全包含这些点的最小凸多边形,这个最小凸多边形就是这些点的凸包。在很多实际场景中,我们可能只关注一个点集的最外层边界,而凸包算法就可…...

es+kibana---集群部署
其实一般es要跑3个节点的,这样才能做高可用,处理并发大,但是我这里只是一个pod mkdir -p /stroe/data/es es搭建: #【拉取镜像】 #docker pull elasticsearch:6.8.7 #docker pull busybox:1.28 【导入镜像】 docker load -i es.…...
])
定时器的源码介绍与简单实现——多线程编程简单案例[多线程编程篇(5)]
目录 前言 什么是定时器 JAVA标准库中的定时器 而关于sched方法,请看源码: 为什么我们能知道"notify() 唤醒后台线程 TimerThread"? TimerThread 关键逻辑 第一步:加锁 queue,看有没有任务 第二步:取出最近要执行的任务 …...

SQL常用数据清洗语句
数据清洗:发现并纠正数据文件里的数据错误和不一致性,让数据达到分析要求的过程。 运用 SQL 进行数据清洗时,可借助多种语句和函数来处理数据中的缺失值、重复值、异常值以及格式错误等问题。 1. 处理缺失值 数据中某些变量的值为空的情况&…...

《Go 语言高并发爬虫开发:淘宝商品 API 实时采集与 ETL 数据处理管道》
在电商数据处理领域,高效获取并处理海量商品数据是企业实现精准运营、市场分析的重要基础。Go 语言凭借其出色的并发性能,成为开发高并发爬虫的理想选择。本文将介绍如何使用 Go 语言进行淘宝商品 API 实时采集,并构建 ETL(Extrac…...
加速篇)
大模型(LLMs)加速篇
当前优化模型最主要技术手段有哪些? 算法层面:蒸馏、量化软件层面:计算图优化、模型编译硬件层面:FP8(NVIDIA H系列GPU开始支持FP8,兼有fp16的稳定性和int8的速度) 推理加速框架有哪一些&#…...

Linux0.11引导启动程序:简略过程
引言 目标:是重写boot文件夹下面的引导文件,加入一些个人信息。语法:由于使用两个语法风格的汇编需要两个汇编器,有些麻烦,直接全都用GNU的 as(gas)进行编译。使用AT&T 语法的汇编语言程序。接下来先拜读同济大学赵…...

【JAVAFX】controller中反射调用@FXML的点击事件失败
场景 当前有一个controller中定义的事件如 FXMLvoid openZhengjieWindow(ActionEvent event) {System.out.println("zhengjie");}通过反射去调用 public void callMethodByString(String methodSuffix) {try {Method method this.getClass().getMethod("open&…...
:初等数学)
人工智能数学基础(二):初等数学
在人工智能领域,初等数学知识是构建复杂模型的基石。本文将从函数、数列、排列组合与二项式定理、集合等方面进行讲解,并结合 Python 编程实现相关案例,帮助大家更好地理解和应用这些数学知识。资源绑定附上完整代码供读者参考学习࿰…...

opendds的配置
配置的使用 文档中说明有4种使用配置的方式: 环境变量 命令行参数(将覆盖环境变量中的配置) 配置文件(不会覆盖环境变量或命令行参数中的配置) 用户调用的 API(将覆盖现有配置) 这里对开发…...

mac 基于Docker安装minio
在 macOS 上基于 Docker 安装 MinIO 是一个高效且灵活的方案,尤其适合本地开发或测试环境。以下是详细的安装与配置步骤,结合了最佳实践和常见问题的解决方案: 一、安装 Docker Desktop 下载安装包 访问 Docker 官网,下载适用于 …...

Docker网络架构深度解析与技术实践
目录 第一章 Docker网络架构核心原理 1.1 容器网络模型(CNM)体系 1.2 网络命名空间隔离机制 1.3 虚拟网络设备对(veth) 1.4 网桥驱动模型 第二章 Docker网络模式深度剖析 2.1 Bridge模式(默认模式) …...

如何通过Google Chrome增强网页内容的安全性
在现代互联网环境中,网页安全问题时常困扰着用户。谷歌浏览器作为全球使用最广泛的浏览器之一,提供了多种方式帮助用户增强网页的安全性。以下是一些简单有效的方法,可以帮助用户提高浏览器的安全防护能力。 首先,谷歌浏览器自带了…...

劳动节ppt免费下载,劳动节ppt模板,劳动节课件
劳动节ppt免费下载,劳动节ppt模板,劳动节素材,学生,幼儿园课件:劳动节ppt_模板素材_PPT模板_ppt素材_免抠图片_AiPPTer...

应用在通信网络设备的爱普生晶振SG2016CBN
在数字化浪潮席卷全球的当下,通信网络已成为信息时代的核心基础设施,从 5G 基站的快速部署到数据中心的高效运转,从光纤网络的稳定传输到无线通信的流畅连接,每一个环节都对时钟信号的稳定性和精准性有着极高要求。一个高质量的时…...

STM32 RTC配置
一、什么是RTC? RTC,即实时时钟,是一种能持续运行并保持当前时间信息的电子装置。它常用于在设备断电的情况下依然能保持准确的年、月、日、时、分、秒信息。 与CPU核心时钟不同,RTC通常采用独立的低频晶振(如32.768…...

图像保边滤波之BEEPS滤波算法
目录 1 简介 2 算法原理 3 代码实现 4 演示Demo 4.1 开发环境 4.2 功能介绍 4.3 下载地址 参考 1 简介 BEEPS(Bias Elimination in Edge-Preserving Smoothing) 是一种基于偏微分方程(PDE)的边缘保留平滑滤波算法。它能够…...

使用OpenCV和dlib库进行人脸关键点定位
文章目录 引言一、环境准备二、代码实现解析1. 导入必要的库2. 加载图像和人脸检测器3. 加载关键点预测模型4. 检测并绘制关键点5. 显示结果 三、68个关键点的含义四、常见问题解决五、总结 引言 人脸关键点定位是计算机视觉中的一项基础任务,它在人脸识别、表情分…...
Transformer数学推导——Q27 证明时序注意力(Temporal Attention)在视频模型中的帧间依赖建模
该问题归类到Transformer架构问题集——注意力机制——跨模态与多模态。请参考LLM数学推导——Transformer架构问题集。 在视频理解任务中,捕捉帧与帧之间的时间依赖关系(如动作的连贯性、物体的运动轨迹)是核心挑战。时序注意力(…...

相机-IMU联合标定:相机标定
文章目录 📚简介💡标定方法🚀标定工具kalibr🚀标定数据录制🚀相机标定📚简介 在 VINS(Visual-Inertial Navigation System,视觉惯性导航系统) 中,相机标定 是确保视觉数据准确性和系统鲁棒性的关键步骤,其核心作用可总结为以下方面: 消除镜头畸变,提升特征…...

sevlet API
sevlet API API就是一组类和方法 HttpServlet 这是写servlet代码用到的核心的类,通过继承这个类,并重写其中的方法,让Tomcat去调用这里的逻辑. init:webapp被加载的时候,执行 destroy:webapp被销毁的时候(Tomcat结束)执行,进行一些收尾工作.但是这个方法不保证能够调用到!!…...

python程序设习题答案
第一章 1.在下列领域中,使用 Python 不可能实现的是( C ) A . Web 应用开发 B .科学计算 C .操作系统管理 D .游戏开发 2.Python程序文件的扩展名是( D )。 A.python B.pyt C.pt D.py 3&…...
)
[计算机科学#4]:二进制如何塑造数字世界(0和1的力量)
【核知坊】:释放青春想象,码动全新视野。 我们希望使用精简的信息传达知识的骨架,启发创造者开启创造之路!!! 内容摘要: 二进制是计算机世界的基石,数学是世界的…...

一种在使用Kaggle并遇上会话中断时强行保存数据的方法
问题:kaggle会话结束后,无法保存训练模型时记录的excel文件 解决方法:使用kaggle时,使用下面脚本可将保存到训练数据excel转为链接形式,从而在kaggle会话终止时也可以下载到该excel文件 import base64 import pandas …...

【人工智能agent】--dify搭建智能体和工作流
【人工智能agent】--docker本地部署dify教程-CSDN博客 上期讲到如何部署dify,然后进入页面: docker服务: 目录 1.基础设置 2.创建聊天助手 3.创建知识库应用 4.创建智能体 5.创建工作流 5.1.文档总结规划 5.2.爬取网页新闻 1.基础设…...

[4282]PHP跨境电商源码-多语言商城源码/支持代理+商家入驻+分销+等等众多功能/带详细安装
源码获取:[4282]PHP跨境电商源码-多语言商城源码/支持代理商家入驻分销等等众多功能/带详细安装云溪资源网_源码下载,小程序源码下载,网站源码下载,游戏源码下载云溪资源网_源码下载,小程序源码下载,网站源码下载,游戏源码下载...

MongoDB的增删改查操作
1.文档创建 首先要插入数据前,要先创建数据库,创建完之后建立集合,然后才能进行增删改查的步骤 切换(新建)数据库: use <db> db是指要创建数据库的名称 新建集合: db.createCollection(…...