双目相机的标定,视差图,深度图,点云生成思路与实现。
该文档记录从双目相机标定到点云生成的所有过程,同时会附上代码。
代码直接能跑。https://github.com/stu-yzZ/stereoCamera
目录
大致思路如下:
一、相机标定
1、相机参数介绍
2、单目相机标定
3、双目相机标定
二、图片畸变矫正
三、极线矫正
1、极线矫正
2、投影矩阵Q
3、图片检查
四、SGBM局部匹配算法计算视差图,并填充
1、设置立体匹配算法SGBM
2、WLS+视差图空洞填充
五、通过视差图计算深度图并可视化
六、通过视差图和Q矩阵计算每个二维坐标对应的三维坐标,同时获取颜色。
七、点云的显示
反思:
大致思路如下:
首先标定双目相机,获取每个相机的内参,同时对相机进行标定,获取相机的相对位置参数,也就是外参。
然后通过相机拍图片并对图片进行矫正(畸变矫正和立体矫正)然后通过立体匹配算法计算视差图,通过视差图计算深度图,有了视差图很多问题都可以解决了,通过视差图可以获得点云信息。



点云数据太大了 我电脑跑不动,但大致可以看到将图片像右旋转45°即和图片视角一致。

一、相机标定
相机标定获取相机参数,用来矫正图。并且要使用相机参数对拍摄的图片进行矫正。相机标定非常重要,所有的计算都是基于相机参数进行的,如果误差较大,后面所有步骤都会受到影响。我自己从淘宝上买了个200左右的双目相机,标定之后结果一直很差,非常影响后续的视差图和深度图的计算。
但是标定的过程一定要自己动手做,只有亲自动手,才能知道一些细节。由于硬件限制(姑且认为是吧),我转换思路,用别人标定好的参数和图片进行视差图和深度图的实现。使用https://vision.middlebury.edu/stereo/data/,这个数据集MiddleburyStereoDatasets进行后续步骤。
1、相机参数介绍
拿单目相机举例,四个坐标系之间需要变换,主要是参数有相机内参和外参。
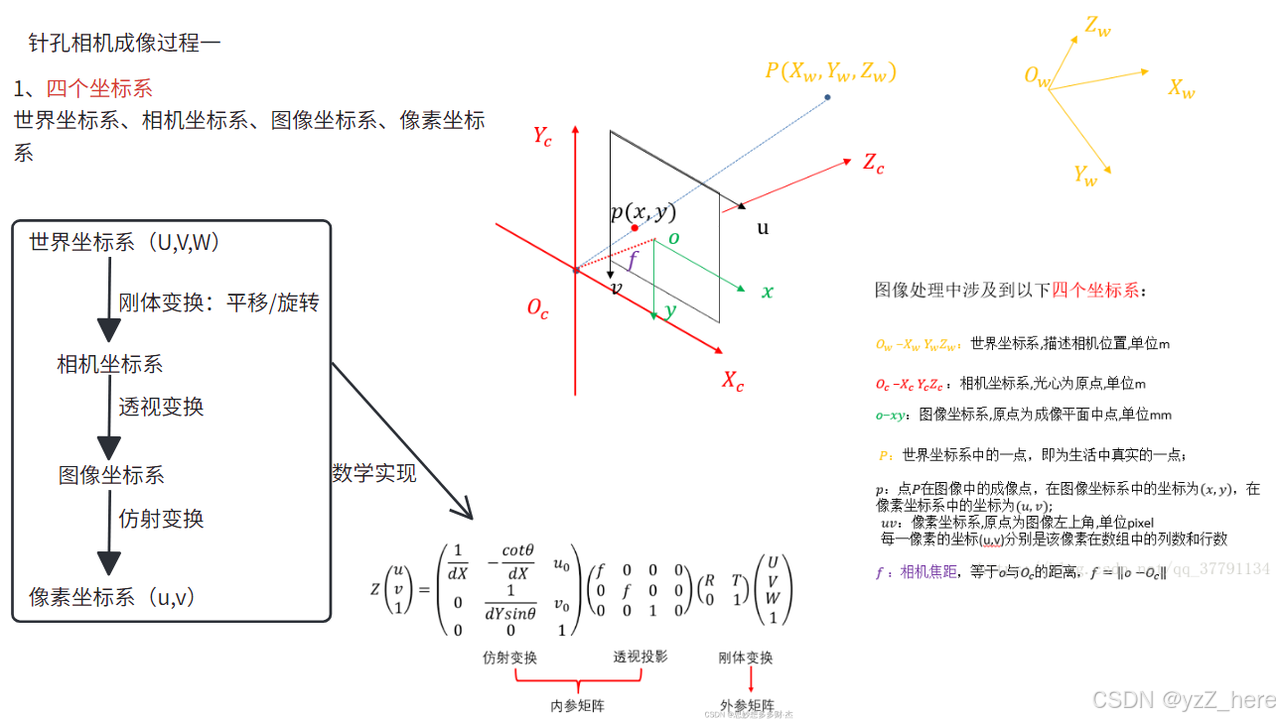
四个坐标系:世界坐标系->相机坐标系->图像坐标系->像素坐标系
内参:共有11个参数变量。其中,相机的内部参数有5个:焦距,像主点坐标,畸变参数;相机的外部参数有6个:旋转,平移。
2、单目相机标定
需要准备一个标定板,一台相机,尽可能多的拍一下照片,张正友标定法。但是标定出高精度的结果太难了,我还是暂时跳过了这个精度的要求,暂时先把整条思路打通。
3、双目相机标定
双目相机标定除了求解每个摄像头的内参外,还需要求解两个摄像头之间的 相对位置 和 姿态,即 外参(旋转矩阵和平移向量)。其中平移矩阵的(以我选择的artroom1的参数为例)是这样的self.T = np.array([[-536.62], [0.0], [0.0]]),其中第一个元素是对应的你自己相机的基线长度,也就是两个相机镜头的距离,单位是mm。如果是自己标定的话也可以通过这个参数判断自己标定误差大小。
二、图片畸变矫正
使用畸变参数对图片进行矫正
cv.undistort该函数可以实现畸变矫正功能。双目相机的话需要对左右两张图像都进行矫正操作。
void undistort( InputArray src, //输入原图OutputArray dst,//输出矫正后的图像InputArray cameraMatrix,//内参矩阵InputArray distCoeffs,//畸变系数InputArray newCameraMatrix=noArray() );三、极线矫正
非常重要的一步,将立体匹配从二维降到一维。(对极约束,是将搜索空间约束到像平面内的一条直线上)
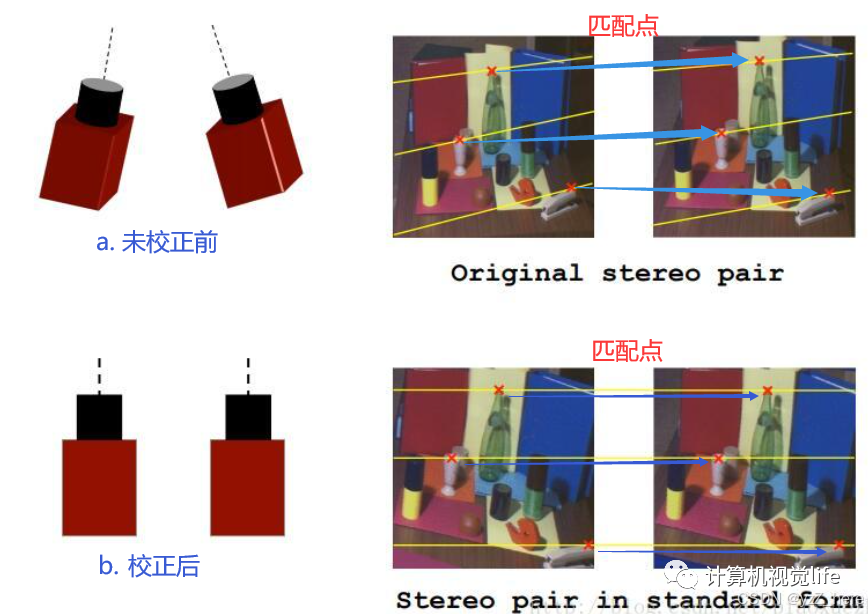
1、极线矫正
这篇文章从原理讲的很细,会让人有生畏的感觉https://zhuanlan.zhihu.com/p/466758105。你也可以跳过没懂的地方,首先你要知道匹配的意思就是要从针对左视图中的某一个像素,在右试图中找到对应的匹配像素,如果不做立体矫正的话,需要从右视图的整个图片中搜索,如果做了立体匹配,可以将匹配过程从整张图片(二维空间)降低到一维空间,极线矫正之后空间中点在左右视图中的投影在同一条直线上。
下面代码展示了从读取图片到极线矫正,并检测矫正情况的过程。
# 读取图像imgl = cv.imread('1_L.jpg')imgr = cv.imread('1_R.jpg')high, wide = imgl.shape[0:2]# 读取相机参数config = stereoCamera()# 消除图像畸变imgl_qb = cv.undistort(imgl, config.cam_matrix_l, config.distortion_l)imgr_qb = cv.undistort(imgr, config.cam_matrix_r, config.distortion_r)# 极线校正map1x, map1y, map2x, map2y, Q = getRectifyTransform(high, wide, config)imgl_jx, imgr_jx = rectifyImage(imgl_qb, imgr_qb, map1x, map1y, map2x, map2y)# print("Print Q!")# print(Q)# 绘制等间距平行线,检查效果line = draw_line(imgl_jx, imgr_jx)其中draw_line函数为:
def draw_line(img1, img2):height = max(img1.shape[0], img2.shape[0])width = img1.shape[1] + img2.shape[1]output = np.zeros((height, width, 3), dtype=np.uint8)output[0:img1.shape[0], 0:img1.shape[1]] = img1output[0:img2.shape[0], img1.shape[1]:] = img2line_interval = 50 # 直线间隔for k in range(height // line_interval):cv.line(output, (0, line_interval * (k + 1)),(2 * width, line_interval * (k + 1)),(0, 255, 0), thickness=2, lineType=cv.LINE_AA)# plt.imshow(output, 'gray')# plt.show()return output2、投影矩阵Q
Q矩阵在后面生成3D点云的时候要用到。暂不多解释。
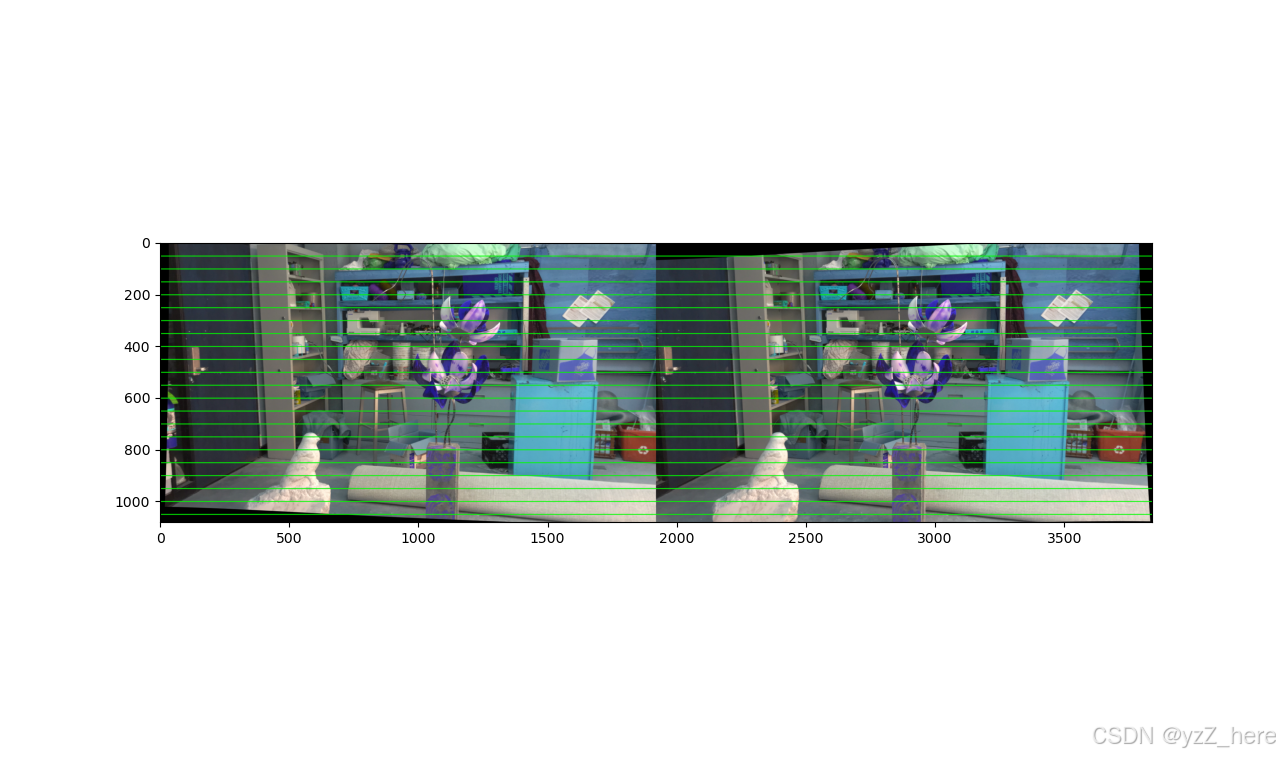
3、图片检查
极线矫正之后的图片进行检查,这个过程很难界定怎么样算是好的,或许肉眼看着在同一个平面但是在像素层面上来看并没有对齐,总的来说这个结果也是和标定结果强相关。我自己标定的结果打印出来感觉没有差很多,但是最后视差图和深度图还是效果很差。下面这是我使用数据集中的参数和图片显示的结果,(数据集中的图片已经是畸变矫正和立体匹配之后的图片,所以他们肯定极线对齐的)
四、SGBM局部匹配算法计算视差图,并填充
通过opencv获取视差图
1、设置立体匹配算法SGBM
SGBM属于局部匹配算法,我调试下来的感觉就是泛化性很低,甚至图片场景变化大的话基本上一张图片对应一套参数,计算量先不谈,我22款拯救者y9000P还能带动,SGBM算法原理我没有太深究,主要的参数调整网上有很多讲解的,可以自己看,比较重要的就是windowssize和最大最小视差,视差值对应图片的深度也就是拍照的距离。窗口大小会影响视差图的平滑与否,可以自己设置调试下。且最大最小视差可以通过拍照的距离计算出来。根据深度计算公式,已知最大最小深度也就是拍照的最近最远距离,可以计算出视差值。我使用的数值来自于数据集中提供的。
同时需要注意视差图的精度问题。
def opencv_SGBM(left_img, right_img, use_wls=False):blockSize = 11paramL = {"minDisparity": 0, #表示可能的最小视差值。通常为0,但有时校正算法会移动图像,所以参数值也要相应调整"numDisparities": 170, #表示最大的视差值与最小的视差值之差,这个差值总是大于0。在当前的实现中,这个值必须要能被16整除,越大黑色边缘越多,表示不能计算视差的区域"blockSize": blockSize,"P1": 8 * 3 * blockSize * blockSize, #控制视差图平滑度的第一个参数"P2": 32 * 3 * blockSize * blockSize, #控制视差图平滑度的第二个参数,值越大,视差图越平滑。P1是邻近像素间视差值变化为1时的惩罚值,#p2是邻近像素间视差值变化大于1时的惩罚值。算法要求P2>P1,stereo_match.cpp样例中给出一些p1和p2的合理取值。"disp12MaxDiff": 1, #表示在左右视图检查中最大允许的偏差(整数像素单位)。设为非正值将不做检查。"uniquenessRatio": 10, #表示由代价函数计算得到的最好(最小)结果值比第二好的值小多少(用百分比表示)才被认为是正确的。通常在5-15之间。"speckleWindowSize": 50, #表示平滑视差区域的最大窗口尺寸,以考虑噪声斑点或无效性。将它设为0就不会进行斑点过滤,否则应取50-200之间的某个值。"speckleRange": 1, #指每个已连接部分的最大视差变化,如果进行斑点过滤,则该参数取正值,函数会自动乘以16、一般情况下取1或2就足够了。"preFilterCap": 31,"mode": cv.STEREO_SGBM_MODE_SGBM_3WAY}matcherL = cv.StereoSGBM_create(**paramL)# 计算视差图dispL = matcherL.compute(left_img, right_img)# WLS滤波平滑优化图像if use_wls:paramR = paramLparamR['minDisparity'] = -paramL['numDisparities']matcherR = cv.StereoSGBM_create(**paramR)dispR = matcherR.compute(right_img, left_img)# dispR = np.int16(dispR)lmbda = 80000sigma = 1.0filter = cv.ximgproc.createDisparityWLSFilter(matcher_left=matcherL)filter.setLambda(lmbda)filter.setSigmaColor(sigma)dispL = filter.filter(dispL, left_img, None, dispR)#双边滤波dispL = cv2.bilateralFilter(dispL.astype(np.float32), d=9, sigmaColor=75, sigmaSpace=75)# 除以16得到真实视差(因为SGBM算法得到的视差是×16的)dispL[dispL < 0] = 1e-6dispL = dispL.astype(np.int16)dispL = dispL / 16.0return dispL2、WLS+视差图空洞填充
wls叫做基于加权最小二乘法的保边缘平滑滤波器。目的是对图像进行平滑处理,代码在上,主要是对视差图进行平滑处理。
这篇文章讲解了基于积分的空洞填充,也包括整个双目视觉的大致流程,也包括一些细节的内容,比如提到了精度相关的知识,我受益匪浅,https://www.cnblogs.com/riddick/p/8486223.html这篇博文是2018年发表的,不得不感慨……
空洞填充可以使得视差图更加的平滑和高质量。但是需要较大算力支持。
五、通过视差图计算深度图并可视化
通过公式计算每个像素(可计算像素)的深度坐标,同时生成深度图并可视化。
1、计算深度图并可视化
直接根据深度计算公式对视差图进行计算,但是要确定深度的单位,z=(f*b)/d,其中f和d的单位是像素,b(baseline)的单位是米,计算出来的z深度单位也是米。
六、通过视差图和Q矩阵计算每个二维坐标对应的三维坐标,同时获取颜色。
1、生成点云信息并保存
看代码即可。没有什么逻辑。
七、点云的显示
1、点云(6d)显示
数据太大了,可以在线展示点云,但是没有颜色信息,看起来不是很直观。
反思:
1、我在这个过程遇到了困扰我很久的问题,就是视差图生成了(虽然差一些),但是深度图一直显示不出来,用颜色映射出来都是红色的。我解决问题的思路一直在视差图转深度图的转换上了,其实最后才意识到源头在于视差图中计算出有大量的无限接近0的数值存在,导致深度无穷远,所以深度图中显示全红,同时也是看到了Middlebury数据集中给出的有效的视差范围,我才意识到这个问题,所以我想说的是如果遇到同样的问题可以将视差图中的数值分布打印成直方图,看看0附近的值是不是非常多,并且确定你自己图像的邮箱视差范围,在深度生成过程中将小于最小有效值的视差值都赋值为最小有效值。这样可以保证视差图转深度图没有问题。
相关文章:

双目相机的标定,视差图,深度图,点云生成思路与实现。
该文档记录从双目相机标定到点云生成的所有过程,同时会附上代码。 代码直接能跑。https://github.com/stu-yzZ/stereoCamera 目录 大致思路如下: 一、相机标定 1、相机参数介绍 2、单目相机标定 3、双目相机标定 二、图片畸变矫正 三、极线矫正…...

解决 minio上传文件Service: S3, Status Code: 403
错误信息 [software.amazon.awssdk.services.s3.model.S3Exception: (Service: S3, Status Code: 403, Request ID: 180E9BC04F11312E, Extended Request ID: 81aefed089495c5faf6270c59bea93c9783926f74ef647fe6b17908f0976b557)]分析过程 4XX一般是客户端错误。403表示禁止…...

SpringBoot实战——个人博客项目
目录 一、项目简介 ?二、项目整体架构 数据库模块 后端模块 前端模块 ?三、项目具体展示 ?四、项目的具体实现 1、一些准备工作 ??数据库、数据表的创建 ??设置数据库和MyBatis的配置 ??将前端项目引入到当前项目中 2、登录注册模块 ??实体类的创建 ?…...

OpenCV-平滑图像
二维卷积(图像滤波) 与一维信号一样,图像也可以通过各种低通滤波器(LPF)、高通滤波器(HPF)等进行过滤。LPF 有助于消除噪音、模糊图像等。HPF 滤波器有助于在图像中找到边缘。 opencv 提供了函数 **cv.filter2D()**&…...

nodejs官方文档学习-笔记-1
一、异步工作 process.nextTick(): 回调会在当前操作完成后立即执行,但在事件循环进入下一个阶段之前。它是最先执行的。 Promise.then(): 回调会在 microtask 队列中执行,通常是在当前操作完成后,但在事件循环进入…...

YOLOv7
YOLOv7 是 YOLO 系列的一个重要版本,由 Chien-Yao Wang 和 Alexey Bochkovskiy 等研究人员和开发者提出,继续改进了 YOLOv4 和 YOLOv5 的设计,主要在模型性能、训练效率以及推理速度上进行优化。YOLOv7 进一步优化了 YOLO 系列在速度和精度之…...
)
汉语唤醒词的模糊判断(Python)
汉语唤醒词的模糊判断【Python】 说明安装库代码Demo其他 说明 这是一个简单的汉语模糊唤醒词的判断器,汉语发音中前后舌以及声母韵母的区别,如果进行精准判断,很容易误判。需要一个模糊判断的逻辑! 安装库 pip install pypinyin代码Demo …...

C语言实例_26之根据输入计算星期几
1. 问题 请输入星期几的第一个字母来判断一下是星期几,如果第一个字母一样,则继续判断第二个字母。 2. 实现思路 思路一:嵌套if-else语句实现 首先接收用户输入的第一个字母,使用if-else语句进行判断。如果输入的是M࿰…...

包管理器npm,cnpm,yarn和pnpm
npm (Node Package Manager) 核心技术与工作原理 依赖解析: 广度优先搜索(BFS):npm 使用 BFS 算法来解析依赖树,尽量扁平化 node_modules 目录以减少重复的依赖项。冲突处理:如果两个包需要同一个依赖的不…...

docker-compose部署skywalking 8.1.0
一、下载镜像 #注意 skywalking-oap-server和skywalking java agent版本强关联,版本需要保持一致性 docker pull elasticsearch:7.9.0 docker pull apache/skywalking-oap-server:8.1.0-es7 docker pull apache/skywalking-ui:8.1.0二、部署文件docker-compose.yam…...

Android -- [SelfView] 自定义多行歌词滚动显示器
Android – [SelfView] 自定义多行歌词滚动显示器 流畅、丝滑的滚动歌词控件* 1. 背景透明;* 2. 外部可控制进度变化;* 3. 支持屏幕拖动调节进度(回调给外部);效果 歌词文件(.lrc) 一. 使用…...

记事本建java及java命名规范
1.桌面开发:c# 2. 记事本建java: 以class的名称(类名)为名,名称.java 编译jdk:javac 名称.java 调动运行jre : java 名称 查看名称.java里面的内容:cat 名称.java java 的命名规范 大驼峰(每个单词首…...

Elasticsearch scroll 之滚动查询
Elasticsearch scroll 之滚动查询 Elasticsearch 的 Scroll API 是一种用于处理大规模数据集的机制,特别是在需要从索引中检索大量数据时。通常情况下,Elasticsearch 的搜索请求会有一个结果集大小的限制 (fromsize 的检索数量默认是 10,000 条记录)&am…...

cartographer建图与定位应用
文章目录 前言一、安装cartographer1.安装环境2.源码编译2.1 下载2.2 编译 二、gazebo仿真2d建图0.准备仿真环境1.编写lua文件2.编写启动文件3.建图保存 三、cartographer定位 move_base导航3.1 编写启动文件3.2 启动launch 总结 前言 本文介绍cartographer在ubuntu18.04下的…...
)
CEEMDAN-CPO-VMD二次分解(CEEMDAN+冠豪猪优化算法CPO优化VMD)
CEEMDAN-CPO-VMD二次分解(CEEMDAN冠豪猪优化算法CPO优化VMD) 目录 CEEMDAN-CPO-VMD二次分解(CEEMDAN冠豪猪优化算法CPO优化VMD)效果一览基本介绍程序设计参考资料 效果一览 基本介绍 首先运用CEEMDAN对数据进行一次分解ÿ…...
:函数式编程)
【Golang】Go语言编程思想(二):函数式编程
函数式编程 函数与闭包 支持函数式编程的语言当中,函数是一等公民,参数、变量、返回值都可以是函数。 以 adder 为例,下例实现了一个函数式编程: package mainimport "fmt"func adder() func(int) int {sum : 0retu…...
(一))
ros项目dual_arm_pick-place(moveit和gazebo联合仿真)(一)
目录 前言正文创建功能包具体代码运行 总结 前言 dual_arm_pick-place项目中,实现了两套的moveit和gazebo联合仿真。 启动文件分别是bringup_moveit.launch和arm_bringup_moveit.launch。 在这个项目中,我将代码重新创建了一个包,co_simula…...

点线面|点到两点直线距离求解
在点云库(PCL)中,计算点到直线的距离可以借助于向量运算。以下是这种计算方法的步骤以及相应的实现代码。 概念 要计算点 AA 到通过点 BB 和 CC 定义的直线的距离,可以使用以下步骤: 定义两个向量: 向量 …...

等保2.0三级测评华为华三交换机路由器
在使用本博客提供的学习笔记及相关内容时,请注意以下免责声明: 信息准确性:本博客的内容是基于作者的个人理解和经验,尽力确保信息的准确性和时效性,但不保证所有信息都完全正确或最新。 非专业建议:博客中的内容仅供参考,不能替代专业人士的意见和建议。在做出任何重要…...
:引入zrouter路由跳转+封装)
鸿蒙分享(二):引入zrouter路由跳转+封装
码仓库:https://gitee.com/linguanzhong/share_harmonyos 鸿蒙api:12 鸿蒙第三方库地址:OpenHarmony三方库中心仓 zrouter地址:OpenHarmony三方库中心仓 1.引入zrouter 1.打开终端界面:输入 ohpm install hzw/zrouter 2.在项目…...

欧拉角和旋转矩阵之间的转换
在实际编程实践中,特别是使用C的Eigen库时,需要掌握多种空间旋转表示之间的转换。本文将深入探讨欧拉角与旋转矩阵之间的相互转换,这是使用库时常见的操作。 首先,让我们了解欧拉角。它是指通过围绕三个基本坐标轴旋转来表示三维对…...

Typora的激活
Typora的安装、激活 图文教程 | 2024年最新Typora激活使用教程合集 Typora 激活指南(2024年最新版) 图文教程 | 2024Typora最新版免费激活使用教程(新旧版可用)...

排查bug的通用思路
⭐️前言⭐️ APP点击某个按钮没有反应/PC端执行某个操作后,响应较慢,通用的问题排查方法: 从多个角度来排查问题 🍉欢迎点赞 👍 收藏 ⭐留言评论 🍉博主将持续更新学习记录收获,友友们有任何问题可以在评…...

探秘CSS3 3D转换:打造立体网页动画与视觉效果的魔法
在现代网页设计中,CSS3 3D转换(3D Transforms)已经成为一种强大的工具,用于创建各种动态效果和视觉吸引力。本文将详细介绍CSS3 3D转换的基本概念、常见属性及其应用示例,帮助您掌握这一技术,提升网页设计的…...

Pycharm 安装两种不同版本的解释器
背景 Pycharm使用的解释器是python3.11,python3.9.x之后不支持win7;有同事需要在win7上使用python制作的exe,而了“win7环境下运行python打包exe提示找不到api-ms-win-core-path-l1-1-0.dll”。 过程 查找了一些资料,发现直接将…...
(上))
小红薯x-s算法分析最新12-06(x-s 56)(上)
目标-小红薯达人作品:aHR0cHM6Ly93d3cueGlhb2hvbmdzaHUuY29tLw 1、确定目标 打上xhr断点 发现是异步请求,同时各个参数已经生成结束了 2、进入第二个异步函数 打上断点并继续运行 发现在e这个位置也生成了,那么再继续往上找异步参数进行断…...

视频融合×室内定位×数字孪生
随着物联网技术的迅猛发展,室内定位与视频融合技术在各行各业中得到了广泛应用。不仅能够提供精确的位置信息,还能通过实时视频监控实现全方位数据的可视化。 与此同时,数字孪生等技术的兴起为智慧城市、智慧工厂等应用提供了强大支持&#…...

JMS和消息中间件:Kafka/RocketMQ
文章目录 消息传递模型使用JMS还是KafkaKafka与RocketMQ的优缺点Kafka与RocketMQ的使用场景Kafka与RocketMQ的选型指南 TPM 项目中, iflow之间使用了JMS,后端项目与数据库通信使用Kafka MQ和JMS的区别: JMS是 java 用来处理消息的一个API规范…...

FreeRTOS之ARM CR5栈结构操作示意图
FreeRTOS之ARM CR5栈结构操作示意图 1 FreeRTOS源码下载地址2 ARM CR5栈结构操作宏和接口2.1 portSAVE_CONTEXT宏2.1.1 portSAVE_CONTEXT源码2.1.2 portSAVE_CONTEXT宏操作栈结构变化示意图 2.2 portRESTORE_CONTEXT宏2.2.1 portRESTORE_CONTEXT源码2.2.2 portRESTORE_CONTEXT宏…...

【技巧】Mac上如何显示键盘和鼠标操作
在制作视频教程时,将键盘和鼠标的操作在屏幕上显示出来,会帮助观众更容易地理解。 推荐Mac上两款开源的小软件。 1. KeyCastr 这款工具从2009年至今一直在更新中。 https://github.com/keycastr/keycastr 安装的话,可以从Github上下载最…...

三种插入排序算法
目录 1.直接插入排序 直接插入排序的步骤示例 直接插入排序的特点 适用场景 2.折半插入排序 折半插入排序的基本原理 折半插入排序的实现过程 折半插入排序的时间复杂度 折半插入排序的特点 3.希尔排序 希尔排序的基本原理 希尔排序的步骤举例 希尔排序的时间复杂…...

力扣100题--移动零
给定一个数组 nums,编写一个函数将所有 0 移动到数组的末尾,同时保持非零元素的相对顺序。 请注意 ,必须在不复制数组的情况下原地对数组进行操作。 示例 1: 输入: nums [0,1,0,3,12] 输出: [1,3,12,0,0]示例 2: 输入: nums [0] 输出: […...

第30天:安全开发-JS 应用NodeJS 指南原型链污染Express 框架功能实现审计0
时间轴: 演示案例: 环境搭建-NodeJS-解析安装&库安装 功能实现-NodeJS-数据库&文件&执行 安全问题-NodeJS-注入&RCE&原型链 案例分析-NodeJS-CTF 题目&源码审计 开发指南-NodeJS-安全 SecGuide 项目、 环境搭建-NodeJ…...

1.使用docker 部署redis Cluster模式 集群3主3从
1.使用docker 部署redis Cluster模式 集群3主3从 1.1 先安装docker 启动docker服务,拉取redis镜像 3主3从我们要在docker启动6个容器docker run --name redis-node-1 --net host --privilegedtrue -v /data/redis/share/redis-node-1:/data redis:6.0.8 --cluster-…...

SAP导出表结构并保存到Excel 源码程序
SAP导出表结构并保存到Excel,方便写代码时复制粘贴 经常做接口,需要copy表结构,找到了这样一个程程,特别有用。 01. 先看结果...

李飞飞:Agent AI 多模态交互的前沿探索
发布于:2024 年 11 月 27 日 星期三 北京 #RAG #李飞飞 #Agent #多模态 #大模型 Agent AI在多模态交互方面展现出巨大潜力,通过整合各类技术,在游戏、机器人、医疗等领域广泛应用。如游戏中优化NPC行为,机器人领域实现多模态操作等。然而,其面临数据隐私、偏见、可解释性…...
)
算法基础学习Day2(双指针)
文章目录 1.题目2.题目解答1.快乐数题目及题目解析算法学习代码提交 2.题目2题目及题目解析算法学习代码提交 1.题目 202. 快乐数 - 力扣(LeetCode)11. 盛最多水的容器 - 力扣(LeetCode) 2.题目解答 1.快乐数 题目及题目解析 …...
)
信奥常考点:二叉树的构建(已知中序和 前序或后序 的情况下)
一、题目引入 这是来自CCF-GESP C七级认证 2024年9月的题目。 我们在此不解题,只把树画出来。 CCF-GESP 编程能力认证 C 七级 2024年9月份详细解析-CSDN博客 二、解题过程 我们可以根据先序遍历得出根节点是A,然后我们得到了A的左子树[B D](橙…...

《CS2》运行时提示“缺少steam_api_64.dll”文件该如何处理?“找不到steam_api.dll,无法继续执行代码”的修复方法
《CS2》游戏运行时文件丢失、损坏与系统报错处理指南 《CS2》上海 Major 淘汰赛这两天也在如火如荼的进行当中,相信有很多go学长在游戏运行时会遇到各种文件丢失、损坏以及系统报错问题,给玩家带来极大的困扰。今天,我们就来详细探讨一下《C…...

MCPTT 与BTC
MCPTT(Mission Critical Push-to-Talk)和B-TrunC(宽带集群)是两种关键通信标准,它们分别由不同的组织制定和推广。 MCPTT(Mission Critical Push-to-Talk)标准由3GPP(第三代合作伙伴…...

aardio - 汉字笔顺处理 - json转sqlite转png
本代码需要最新版 godking.conn 库,请自行下载! 如果没有安装 odbc for sqlite 驱动,可以使用 godking.conn.driver.sqlite3.install() 安装。 也可以在此下载自行安装:http://www.chengxu.online/show.asp?softid267 1、将js…...

图的遍历之DFS邻接矩阵法
本题要求实现一个函数,对给定的用邻接矩阵存储的无向无权图,以及一个顶点的编号v,打印以v为起点的一个深度优先搜索序列。 当搜索路径不唯一时,总是选取编号较小的邻接点。 本题保证输入的数据(顶点数量、起点的编号等…...
)
kdenlive 一个视频一左一右拼接(抖音长屏转宽屏)
参考kdenlive 剪裁_Kdenlive中的分层合成-CSDN博客 kdenlive 一个视频一左一右拼接(抖音长屏转宽屏) 按照图片的操作...

深度学习-53-AI应用实战之基于labelImg和labelme的手动标注
文章目录 1 labelImg1.1 简介1.2 安装使用1.3 文件格式1.3.1 pascalVOC格式1.3.2 yolo格式1.4 验证显示2 labelme2.1 简介2.2 安装使用2.3 labelme转换为yolo3 参考附录1 labelImg 1.1 简介 labelImg(label image)是一个开源的图像标注工具,用于创建图像标注数据集。它提供了…...
)
白鲸优化算法原理,白鲸算法公式,白鲸算法应用(白鲸算法测试效果,白鲸算法优化BP神经网络,白鲸算法路径优化)
目录 白鲸算法主要原理 白鲸算法主要公式 白鲸算法应用案例 白鲸算法主要原理 白鲸优化算法(Beluga Whale Optimization Algorithm,BWO)是一种基于种群的元启发式优化算法,灵感来源于白鲸的生活行为。该算法通过模拟白鲸的游泳、捕食和鲸落行为来实现模型参数的优化…...

KubeEdge、ThingsBoard 和 CnosDB:智能物联网平台的完美组合
概述 在数字化时代,物联网(IoT)正在改变我们的生活和工作方式。KubeEdge、ThingsBoard 和 CnosDB 是三个领先的开源平台,它们在物联网领域各自发挥着重要的作用,并且可以无缝集成,为用户提供强大的解决方案…...

最简单的线性回归神经网络
数据: # 线性回归 import torch import numpy as np import matplotlib.pyplot as plt# 随机种子,确保每次运行结果一致 torch.manual_seed(42)# 生成训练数据 X torch.randn(100, 3) # 100 个样本,每个样本 3 个特征 true_w torch.tenso…...
)
[软件工程]九.可依赖系统(Dependable Systems)
9.1什么是系统的可靠性(reliability) 系统的可靠性反映了用户对系统的信任程度。它反映了用户对其能够按照预期运行且正常使用中不会失效的信心程度。 9.2什么是可依赖性(dependablity)的目的 其目的是覆盖系统的可用性&#x…...

浏览器解析页面流程
从输入一个url到页面解析完成的流程 1. 网络进程 1. 获取url 浏览器首先判断输入的url是否有http缓存,如果有则直接从http缓存中读取数据并显示。如果没有,则进行下一步。进行DNS解析,获取域名对应的IP地址。 2.下载html文件 浏览器根据I…...

鸿蒙实现视频播放功能
目录: 1、鸿蒙视频功能介绍2、AVPlayer组件实现视频播放2.1、播放功能的逻辑处理2.2、页面调用渲染2.3、缓存播放信息 3、video组件实现视频播放3.1、鸿蒙官网实现代码3.2、通过xml布局文件代码实现I. 创建项目II. 定义布局文件III. 实现音频和视频播放功能IV. 音频…...